t
Изобретение относится к области судостроения, в частности к устройствам для гидродинамических испытаний моделей судов в открытых водоемах ; на спокойной воде и при волнении.
Известно устройство для буксировки моделей судов, содержащее буксировочную штангу, смонтированную с возможностью возвратно-поступатель- ,0 ного перемещения в направляющих с карданом для закрепления этой штанги на модели судна в районе ее центра тяжести, причем конец буксировочной, штанги выполнен в виде раздвоенного 5 хвостовика, внутри которого размещен кардан, снабженный вилкой, одним концом шарнирно связанной с карданом посредством радиально-упругого подшипника, а другой койец вилки JQ выполнен с шарнирами для крепления ее к модели судна в районе центра тяжести и с датчиком рассогласова- ния по углу упора между вилкой и
основной плоскостью модели судна tn.
Недостатками этого устройства являются расположение датчика рассогласования в районе центра тяжести модели и связь установки датчика с основной плоскостью модели судна. Такая кинематическая схема компенсации рассогласования по углу упора ограничивает круг моделей, которые могут испытываться с помощью этого устройства. Например, не могут быть испытаны модели, меняющие свой ходовой дифферент в значительных пределах: .модели глиссирующих судов, судов на подводных крыльях (в особенности с одним носовым крылом),. судов на воздушной подушке.
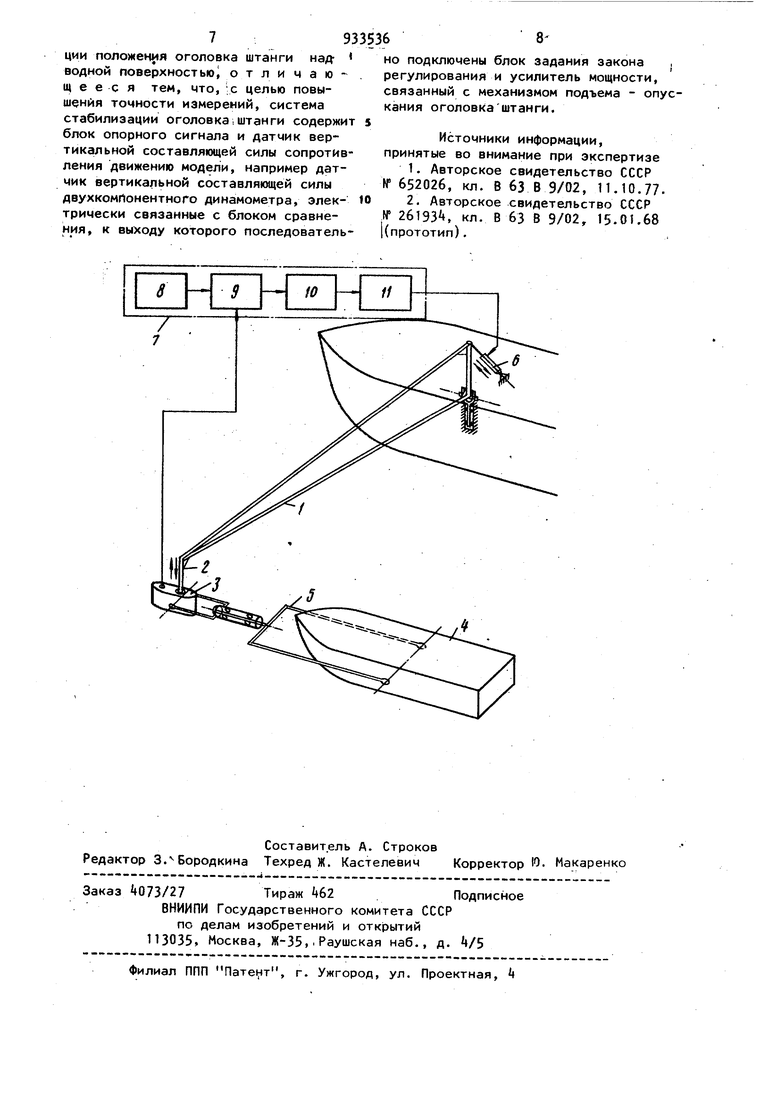
Известно буксировочное устройство для испытания моделей судов в открытых водоемах, состоящее из установленной на буксировщике штанги с державкой и динамометром для измерения силы сопротивления движению модели. механизма подъема - опускания оголов ка штанги и системы стабилизации положения оголовка штанги над водной поверхностью Г2. Недостатками такого устройства являются сложность выполнения системы стабилизации, включающей гироскоп, датчики угловых ускорений по крену и дифференту, электроконтактные датчики положения свободного конца штанги относительно поверхности воды по высоте и соответствующие исполнительные механизмы, и ненадежность системы контроля положения свободного конца штанги относительно поверхности воды. Электроконтактные датчики системы контроля положения конца штанги включают исполнительные механизмы подъема опускания штанги при любых, даже скоротечных процессах, например при встрече с единичной волной происходит за короткий отрезок времени два включения - на подъем штанги и тут ж на опускание. Такое беспрерывное под рабатывание исполнительных механизмо приводит к колебаниям конструкции штанги и динамометра, вибрации их и вносит погрешности в результаты изме рений. Цель изобретения - повышение точHocfVi измерений. Поставленная цель достигается тем что система стабилизации оголовка штанги содержит,блок опорного сигнал и датчик вертикальной составляющей силы сопротивления движению модели, например датчик вертикальной составл ющей силы двухкомпонентного динамоме ра, электрически связанные с блоком сравнения, к выходу которого последо вательно подключены блок задания зак на регулирования и усилитель мощности, связанный с механизмом подъема опускания оголовка штанги. На чертеже изображена схема букси ровочного устройства. Устройство состоит из закрепленно в носовой части катера-буксировщика штанги 1 с державкой 2 и динамометром 3 для измерения силы сопротивления движению буксируемой модели , связанной с динамометром 3 упряжкой 5, закрепленной в районе центра тяжести модели и позволяющей ей совершать любые качания и перемещения за исключением рысканий. Штанга 1 связана кинематически с механизмом 6 подъема-спускания оголовка штанги. 6 . 4 а динамометр 3 связан электрически с системой 7 стабилизации положения оголовка штанги 1 над водной поверхностью. Эта система содержит блок 8 опорного сигнала, например генератор стабилизированного напряжения, блок 9 сравнения сигнала датчика вертик-альной компоненты силы сопротивления модели, поступающего от динамометра 3, с опорным сигналом блока 8, блок 10 задания закона регулирования и усилитель 11 мощности для подачи сигнала на механизм 6, например на электрогидроманипулятор гидропри вода подъема-опускания оголовка штанги. Державка 2 жестко закреплена на оголовке штанги 1, а на нижнем конце этой державки закреплен двухкомпонентный динамометр 3 для измерения горизонтальной и вертикальной составляющих силы сопротивления движению модели. Горизонтальная компонента этой силы представляет собой буксировочное сопротивление модели, а вертикальная - силу, возникающую из-за рассогласования по углу в вертикальной плоскости между направлением силы буксировочного сопротивления модели и положением динамометра относительно горизонтальной плоскости, в которой находится центр тяжести модели, а значит, и точка крепления упряжки 5 к модели. Для повышения точности замеров буксировочного сопротивления модели вертикальная компонента сЛ1ЛЫ сопротивления движению модели должна быть равна нулю. Если же эта сила не равна нулю, то при ее направлении вниз она приводит к перезаглублению модели и искажению показателя буксировочного сопротивления модели в стброну выше действительного его значения, а при направлении силы вверх к подъему модели из воды и искажению результата измерений буксировочного . сопротивления в сторону ниже действительного его значения при действии на модель только сил поддержания, массы модели, горизонтальной силы, приводящей модель в движение, и также горизонтальной силы буксировочного сопротивления модели. Блок 8 системы стабилизации предназначен для выработки опорного сигнала, задающего положение динамометра относительно поверхности веды, блок 9 - для выработки сигнала, знак и величина которого пропорциональны отклонению динамометра от заданного положения, а блок 10 - для обеспечения устойчивости системы регулирования и оптимальных ее характеристик Этот блок может быть выполнен, напри мер, в виде аналогового или.цифрового звена с заданной передаточной характеристикой. Устройство работает следующим образом, В положении катера-буксировщика на стопе, когда модель k свободно ПОКОИТСЯ на плаву, настраивают блок так, чтобы величина и знак этого сигнала были равны тем же значениям сигнала динамометра 3, пропорциональ ного нулевому значению вертикальной компоненты силы, приложенной к динамометру. Тогда при поступлении на блок 9 двух сигналов - от блока 8 и динамометра 3 - результирующий сигнал на выходе из блока 9 будет равен нулю. На ходу катера-буксировщика меняются осадки.и ходовые дифференты как самого катера, так и буксируемой модели, особенно в случаях, если это модель судна на воздушной подушке или на подводных крыльях. При этом динамометр 3 выходит из горизон тальной плоскости, проходящей через центр тяжести модели, в результате чего со стороны последней на динамометр 3 начинает действовать вертикальная сила и сигнал динамометра, пропорциональный этой вертикальной компоненте, будет отличаться от опор ного сигнала блока 8, в результате чего блок 9 вырабатывает сигнал рассогласования, который после прохождения блока 10 и усилителя 11 включа ет механизм подъема или опускания оголовка штанги 1 с динамометром 3 и штанга будет опускаться или подниматься до. тех пор, пока не уменьшится до заданных пределов значение вер тикальной компоненты силы сопротивления движению модели. Величина этого допустимого коридора отклонения вертикальной силы от нулевого значения задается бло.ком 10. Таким образом, происходит автоматическое поддержание штанги 1 в заданном поло жeнv1и относительно буксируемой модели, что способствует повышению точности измерений параметров движения буксируемой модели. Преимущество предлагаемого устройства состоит в том, что стабилиза 66 ция положения штанги с динамометром . относительно поверхности воды осуществляется с помощью более точного индикатора отклонения процесса эксперимента от заданных условий - через вертикальную составляющую силы сопротивления движению модели, что является более точным показателем отклонения процесса буксировки от нормы, чем через показатель рассогласования по углу упора между вилкой упряжки и какой-либо геометрической характеристикой модели, например основной плоскостью. При этом устройство не реагирует на случайные, даже значительные импульсные изменения дифферента модели, например, на встречной одиночной волне, если при этом не возрастает в ту или другую сторону от коридора допусков вертикальная составляющая силы сопротивления движению модели. Предлагаемое устройство более простое в исполнении и обслуживании, система стабилизации не содержит подвижных деталей и механизмов (гироскопов, нажимных датчиков положения и конечных выключателей), открытых контактов, т.е. не подвержена воздействию соленой воды и волнения. Жесткое соединение державки динамометра со штангой не вносит значительной погрешности в результаты измерений при изменении положения штанги, поскольку последняя обычно выполняется длиной 8-10 м для исключения влияния на модель нсюовой системы волн катера-буксировщика, поэтому при подъеме-опускании оголовка штанги на высоту порядка 200-300 мм угол отклонения державки от вертикали очень незначителен, но преимущество от параллелограммных механизмов ощутимо сказывается на массе стрелы буксировочного устройства, вибрации стрелы, снижении мощности приводов и упрощении обслуживания устройства. Формула изобретения Буксировочное устройство для гидродинамических испытаний моделей судов в открытых водоемах, содержащее установленную на буксировщике штангу с державкой и динамометром для измерения силы сопротивления движению модели, механизм подъема-опускания ; оголовка штанги и систему стабилизации положения оголовка штанги надводной поверхностью отличающ е е с я тем, что, :с целью повышения точности измерений, система стабилизации оголовка;штанги содержит блок опорного сигнала и датчик вертикальной составляющей силы сопротивления движению модели, например датчик вертикальной составляющей силы двухкомПонентнсго динамометра, электрически связанные с блоком сравнения, к выходу которого последовательно подключены блок задания закона . регулирования и усилитель мощности, связанный с механизмом подъема - опускания оголовкаштанги.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР W 652026, кл. В 63 В 9/02, 11.10.77.
2.Авторское свидетельство СССР № 26193. кл. В 63 В 9/02, 15.01.68 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| БУКСИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ МОДЕЛЕЙ СУДОВ В ОТКРЫТЫХ ВОДОЕМАХ | 1970 |
|
SU261934A1 |
| Буксировочный комплекс для испытания моделей судов в открытых водоемах | 1980 |
|
SU906782A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВОЧНЫХ ИСПЫТАНИЙ МАСШТАБНЫХ МОДЕЛЕЙ НАДВОДНЫХ СУДОВ НА ОТКРЫТОМ ВОДОЕМЕ | 2015 |
|
RU2579239C1 |
| Буксировочное устройство для гидродинамических испытаний моделей судов | 1973 |
|
SU503784A1 |
| Стенд для экспериментального исследования процессов движения на плаву и затопления двухзвенного гусеничного транспортера | 2023 |
|
RU2804146C1 |
| Способ определения маневренных качеств скоростных судов | 1983 |
|
SU1117250A1 |
| Буксировочное устройство для гидродинамических испытаний моделей судов | 1980 |
|
SU906781A1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Малогабаритный буксировщик воздушных судов с дистанционным управлением | 2015 |
|
RU2645175C2 |
