i:
Известны устройства для автоматического управления электровозом, содержащие соединенные ,с колесной парой датчики скорости, например тахогенераторы, тарограм-мные задатчики скорости и длин контрольных участков, вычислительное устройство, точечный и непрерывный датчики пройденного пути, корректор скорости, коммутатор и логический блок.
Предложенйое устройство отличается тем, что, 1C целью повышения точности и надежности, в нем вычислительное устройство, служащее одновременно и органом сравнения, содержит синусно-косинусный трансформатор со следящим микроприводом. Одна из статорных обмоток трансформатора подключена к- зажимам датчика скорости, соединенного с зажимами программного задатчика скорости и ее корректора, а вторая соединена с зажимами датчи-ка пройденного пути и задатчика длины контрольного участка. Роторная обмотка синусно-косинусното трансформатора через усилитель подключена к коммутатору, первый контакт которого присоединен к обмотке управления следящего микродвигателя, а второй - через логический блок к устройсгвам управления тяговыми двигателями или тормозной системе.
Кривой V (S) л V(S) и значения V (5.) я V {5J.
Устройство содержит тахогенератор /, ламельный делитель 2, шаговый переключатель
3, синусно-косинусный поворотный трансформатор 4, статор 5 трансформатора, датчик 6 непрерывного отсчета пути, задатчик 7 длины контрольного участка, ротор 8 синусно-косинусного поворотного трансформатора, усилите.ль 9, исполнительный двигатель 10, контактное устройство-коммутатор /J, отметчик 12 конца предыдущего контрольного участка и начала последующего, электромагнитную муфту 13, блок тяги 14, блок торможения 15,
контакт 16 коммутатора 11, блок 17 «ИЛИ, блок 18 задания программного времени, датчик 19 текущего времени, сравнивающее устройство 20, функциональный блок 21, преобразующий временные отклонения в напряжение, контакт 22 коммутатора 11. Обозначения на графике (фиг. 2):
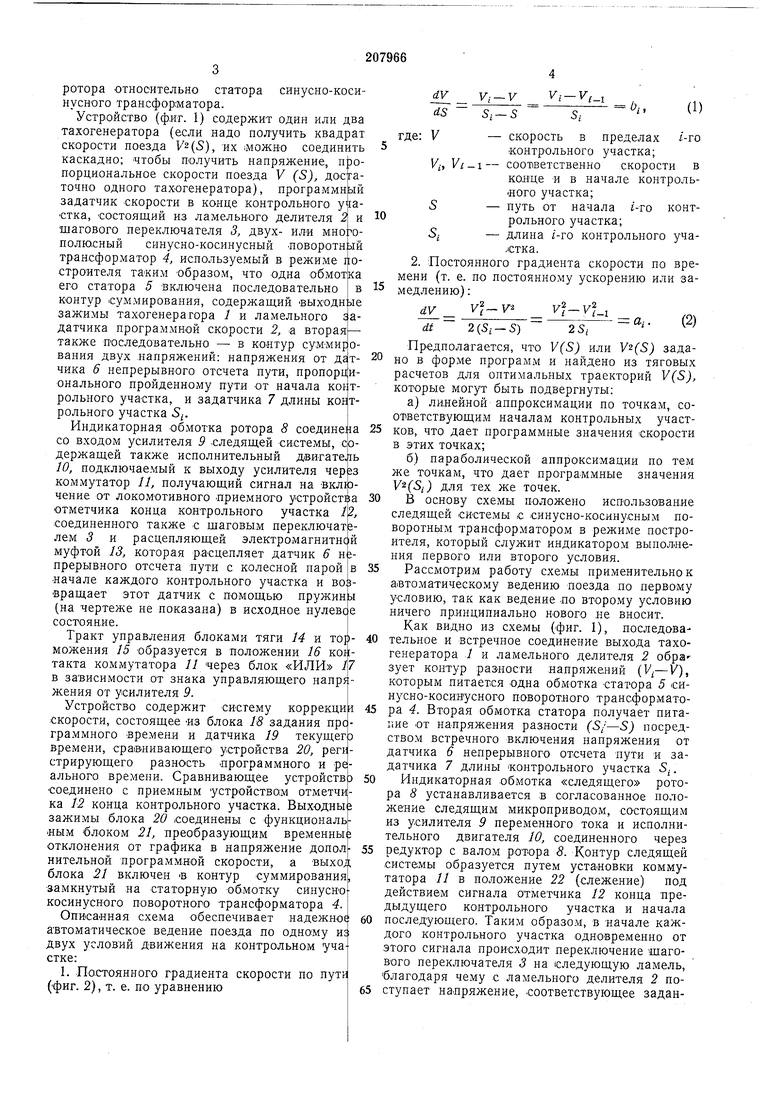
V - скорость в пределах контрольного участка, V2 - квадрат скорости в пределах контрольного участка, 5 - путь от начала контрольного участка; У; и V i-i - скорости соответственно в конце и начале контрольного участка; S; - длина г-го контрольного участка; У(5)-функция скорости от пути, найротора относительно статора синусно-кос нусного трансформатора. Устройство (ф.иг. 1) содержит один или дв тахогенераторл (если надо получить квадра скорости поезда V(S), их ;можно соединит каскадно; чтобы получить напряжение, п порциональное скорости поезда V (S), дос точно одного тахогенератора), программн задатчик скорости в конце контрольного у стка, СОСТОЯЩИЙ из ламельного делителя 2 шагового переключателя 3, двух- или мно: полю,сный синусно-косинусный ловоротн трансформатор 4, используемый в режиме i строителя та-ким образом, что одна обмот его статора 5 включена последовательно контур .суммирования, содержащий выходн зажимы тахогенерагора 1 и ламельного i датчика программной скорости 2, -а вторая также последовательно - в контур суммир вания двух напряжений; напряжения от д чика 6 непрерывного отсчета пути, пропорп опального пройденному пути от начала KOIрольного участка, и задатчика 7 длины ков рольного участка 5. Индикаторная обмотка ротора 8 соедине со входом усилителя 9 следящей системы, с держащей также исполнительный двигате 10, подключаемый к выходу усилителя чер коммутатор //, получающий сигнал на вкл чение от локомотивного приемного устройст отметчика конца контрольного участка j соединенного также с щаговым переключат лем 3 и расцепляющей электромагнитн муфтой J3, которая расцепляет датчик 6 н прерывного отсчета пути с колесной парой начале каждого контрольного участка и во вращает этот датчик с помощью пружин (на чертеже не показана) в исходное нулев состояние. Тракт управления блоками тяги 14 и то можения 15 образуется в положении 16 ко такта коммутатора 11 через блок «ИЛИ в зависимости от знака управляющего напр жения от усилителя 9. Устройство содержит систему коррекц скорости, состоящее «з блока 18 задания пр граммного времени и датчика 19 текуще времени, срайнивающего устройства 20, per стрирующего разность программного и р ального времени. Сравнивающее устройств соединено с приемным устройством отметч ка 12 конца контрольного участка. Выходнь зажимы блока 20 соединены с функционал «ым блоком 21, преобразующим временнь отклонения от графика в напряжение допо; нительной программной скорости, а выхо блока 21 включен в контур суммировани замкнутый на статорную обмотку синусн1 косинусного поворотного трансформатора 4 Описанная схема обеспечивает надежно автоматическое ведение поезда по одному двух условий движения на контрольном уч стке: i-Vi-i Si - скорость в пределах -го контрольного участка; Vi, Vi-i - соответственно скорости в колце и в начале контрольного участка; S- путь от начала z-ro контрольного участка; Si- длина г-го контрольного уча2. Постоянного градиента скорости по времени (т. е. по постоянному ускорению или замедлению) : VJ-VL: 2 (5; - 5)2 предполагается, что V(S) или V(S) задано в форме программ и найдено из тяговых расчетов для оптимальных траекторий V(S), которые могут быть подвергнуты: а)линейной аппроксимации по точкам, соответствующим началам контрольных участков, что дает программные значения скорости в этих точках; б)параболической аппроксимации по тем же точкам, что дает программные значения V(Si) для тех же точек. В основу схемы положено использование следящей системы с синусно-косинусным поворотным трансформатором в режиме построителя, который служит индикатором выполнения первого или вторОго условия. Рассмотрим работу схемы применительно к автоматическому ведению поезда по первому условию, так как ведение по второму условию ничего принципиально нового не вносит. Как видно из схемы (фиг. 1), последовательное и встречное соединение выхода тахогенератора 1 и ламельного делителя 2 обра зует контур разности напряжений (), которым питается одна обмотка статора 5 синусно-косинусного поворотного трансформатора 4. Вторая обмотка статора получает питание от напряжения разности (5/-S) посредством встречного включения напряжения от датчика 6 непрерывного отсчета пути и задатчика 7 длины контрольного участка 5. Индикаторная обмотка «следящего ротора 8 устанавливается в согласованное положение следящим микроприводом, состоящим из усилителя 9 переменного тока и исполнительного двигателя 10, соединенного через редуктор с валом ротора 8. Контур следящей системы образуется путем установки коммутатора // в положение 22 (слежение) под действием сигнала отметчика 12 конца нредыдущего контрольного участка и начала последующего. Таким образом, в начале каждого контрольного участка одновременно от этого сигнала происходит переключение шагового переключателя 3 на следующую ламель, благодаря чему с ламельного делителя 2 поной програ,.ммной скорости V в конце данного г-го контрольного участка, начало которого зафиксировано отметчиком 12. Сигналом от того же датч,ика отключается электромагнитная муфта 13, и вал датчика 6 с помощью Спиральной пружнны (или электромагнитной унругости) возвращается в исходное положение на короткое время (норядка нескольких десятков или сотен миллисекунд), неооходимое для приведения следящей систе- ю мы 9, 10 в .согласованное нолол ;ение, после чего муфта 13 снова сцепляет вал датчика 6 с колесной парой {устройство повторного включения на фиг. 1 не показано); контакт коммутатора 11 переходит в положение 16 15 (управление), исполнительный двигатель 10 останавливается, и ротор 8 остается на все время движения по первому контрольному участку в неизменном положении с углом поворота а (устройство новторного переклю- 20 чения контакта коммутатора 11 по условию согласования следящей системы на фиг. 1 не показано). Согласно принципу действия синусно-косинусного новоротного трансформатора в режи- 25 ме построителя угол а в равновесном состоянии следящей системы определяется на основании уравнения 1, как a. flrrtg/ arctg(fe;), 5; что соответствует отсутствию напряжения управления Uy на зажимах обмотки ротора, т. е. и, . 0. При отклонении скорости поезда V от условия 1 и, следовательно, 4, появнтся напряжение со знаком, соответствующим знаку отклонения скорости V от. условия 1. Таким образом, t/,.г.;|,(Д1/) и синусно-косинусный поворотный трансформатор 4 является индикатором движения поезда со скоростью, соответствующей заданному закону 1. Нанряжение Vу подается через усилитель 9 45 в блок тяги 14 или торможения 15 в зависимости от знака (фазы) этого нанряжения, что определяется логическим блоком «ИЛИ 17, служащим для подключения сигнала управления ДУу( к блоку тяги 14 или торможения 50 15 в зависимости от знака этого сигнала. Управление тягой и торможеннем может происходить как непосредственно по нанряжению рассогласования , так н по интегралу 5 W 30 /4 35 40 от этого рассогласования. Управляющие цени могут включать в себя дополнительно блоки задержки и другие логические элементы для достижения нужного качества переходных процессов с учетом динамических и статических характеристик агрегатов тяги и торможения. Схема фиг. 1 предусматривает один из возможных видов коррекции по времени в случае нарушения графика движения. Схема коррекции построена на том, что в момент прохождения через точку конца контрольного участка регистрируется разность ДТ между программным временем, получаемым от блока 18, и текущим временем от датчика Г9. Эта разность подается в форме напряжения в сравнивающее устройство 20, регистрирующее ее на своих выходных зажимах по сигналу от нриемного локомотивного устройства точечного отметчика 12 конца контрольного участка. БЛОК 21 преобразует разность ДГ по закону, связывающему эту разность с корректирующей поправкой -гДУ, добавляемой к программному значению скорости на конце соот,ветствующего ;:онтрольного участка, Предмет .изобретения Устройство для автоматического управления электровозом, содержащее соединенные с колесной парой датчики скорости, например тахогенераторы, программные задатчики скорости и длин контрольных участков, вычислительное устройство, точечный и непрерывный датчики пройденного нути, корректор скорости, коммутатор и логический блок, отличающееся тем, что, с целью новышения точности и надежности, в нем вычислительное устройство, служащее одновременно и органом сравнения, содержит синусно-косинусный трансформатор со следящим микронриводом, одна из статорных обмоток трансформатора подключена к зажимам датчика скорости, соединенного с зажимами программного задатчика скорости и корректора скорости, а вторая соединена с зажимами датчика пройденного пути и задатчика длины контрольного участка, роторная обмотка синусно-косинусного трансформатора через усилитель подключена к коммутатору, который присоединен первым контактом к обмотке управления следящего микродвигателя, а вторым - через логический блок - к устройствам управления тяговыми двигателями или тормозной системе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МАГИСТРАЛЬНЫМ ЭЛЕКТРОВОЗОМ | 1966 |
|
SU187079A1 |
| Интегрирующий привод переменного тока | 1984 |
|
SU1275365A1 |
| НАКЛОННО-ПОВОРОТНЫЙ СТЕНД | 2004 |
|
RU2277697C1 |
| Вентильный электропривод | 1988 |
|
SU1633477A1 |
| Бесконтактный регулируемый электропривод | 1990 |
|
SU1830598A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ДОЗНЫХ ПОЛЕЙ | 2000 |
|
RU2192901C2 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Вентильный электродвигатель | 1986 |
|
SU1418879A1 |
| Моментный вентильный электродвигатель | 1985 |
|
SU1277308A1 |
| Вентильный электропривод | 1989 |
|
SU1676053A1 |

iSI
Vi
