В системах автоматического контроля получили широкое распространение системы, где измерение электрических и неэлектрических величин производится методом динамической компенсации (например, системы обегающего контроля, сигнализаторы, самописцы и т. д.), однако, в этих системах вследствие несовершеиства элементов схемы сравнения, нульоргана и непостоянства компенсирующей (развертывающей) величины возникает несоответствие выходного нараметра измеряемому входному.
Супд,ествующие погрешности в такого типа системах, осуществляющих измерение методом дииамической компеисации, по результату их воздействия на момент равенства измеряемой и компепсирующей величин можно свести, в основном, к двум видам:
1)ногреишости типа «зоны нечувствительности (Л);
2)погрешности типа «дрейфа иуля (б).
Обычный путь борьбы с этими погрешностями-стабилизация элементов схемы или тщательный учет погреппюстей и введение поправок.
По предложепному способу динамической ком 1енсации для повышения точности измерения нри нониженных требованиях к нрецизиоимости и стабильности элементов системы симметрично развертывают измеряемый и
компеисирующии сигналы и дважды за период развертки сравнивают эти сигналы, причем во второй нолоБиие периода изменяют полярность измеряемого сигнала, а суммируют результаты сравнений с учетом их знаков за весь нериод.
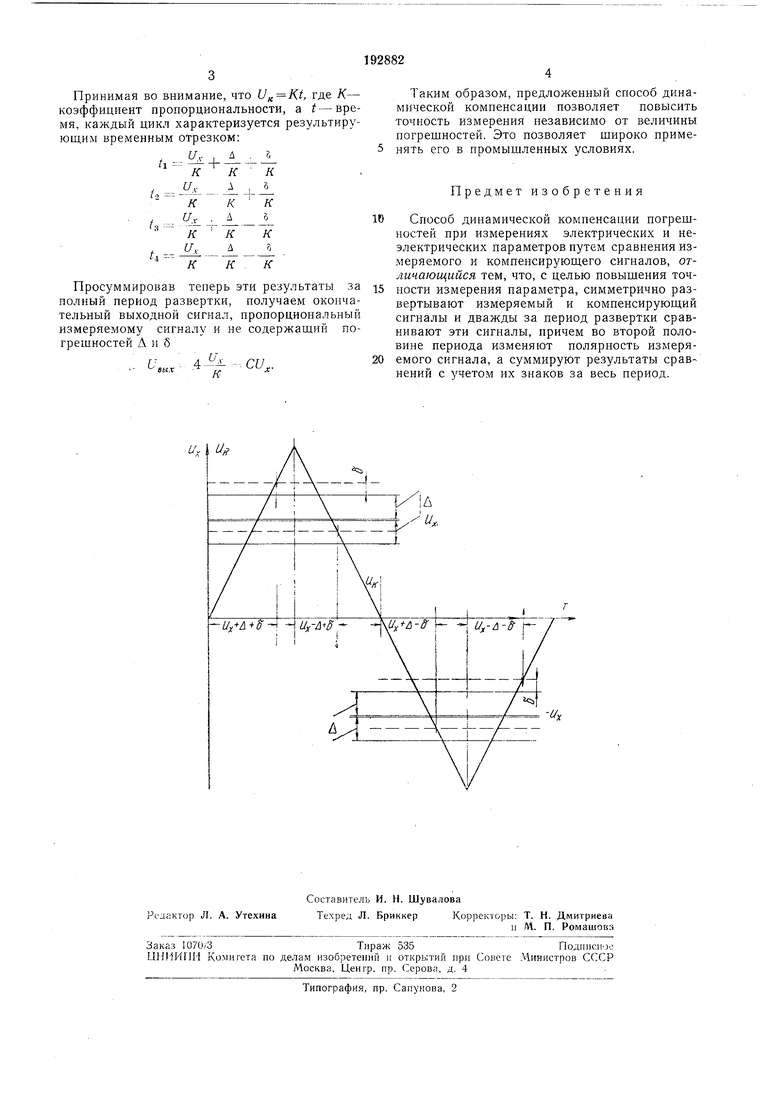
На чертеже изображен графнк кКТ) и,1(Т).
Сущность предлагаемого способа заключается в следующем.
Компенсирующий сигнал L. развертывают симметрично во времени. При измерении фиксируют моменты равенства измеряемого сигнала (; и первого полупериода ко.мпенсирующего сигнала f/V (например, появлением импульсов на выходе системы), а затем меняют полярность измеряемого параметра i. и фиксируют подобным же образом моменты равенства его со вторым полуперподом U (см. чертеж).
Выходш ю нмпульсы образуют некоторые циклы.
Уравнения компенсацпи в каждый цикл с учетом вышеиазвапных погрешностей имеют следуюший вид:
Л---5 0
Принимая во внимание, что U Kt, где К- коэффициент пропорциональности, а t - время, каждый цикл характеризуется результирующим временным отрезком:
/ - + ; А К К К
...-..-л+А
f ,
к к к
и,- Ji5
к к к
просуммировав теперь эти результаты за полный период развертки, получаем окончательный выходной сигнал, пропорциональный измеряемому сигналу и не содержащий погрешностей А и б
-:CL/,
.- и..
Таким образом, предложенный способ динамической компенсации позволяет повысить точность измерения независимо от величины погрешностей. Это позволяет широко применять его в промышленных условиях.
Предмет изобретения
Способ динамической компенсации погрешностей при измерениях электрических и неэлектрических параметров путем сравнения измеряемого и компенсирующего сигналов, отличающийся тем, что, с целью повышения точпости измерения параметра, симметрично развертывают измеряемый и компенсирующий сигналы и дважды за период развертки сравнивают эти сигпалы, причем во второй половине периода изменяют полярность измеряемого сигнала, а суммируют результаты сравнений с учетом их знаков за весь период.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ преобразования аналогового сигнала в широтно-импульсный и измерительный преобразователь для его осуществления | 1986 |
|
SU1480109A1 |
| Устройство для измерения магнитных характеристик ферросердечников | 1981 |
|
SU960685A1 |
| СПОСОБ ИЗМЕРЕНИЯ RLC-ПАРАМЕТРОВ | 1995 |
|
RU2100813C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2106597C1 |
| Устройство для автоматической коррекции нулевой линии хроматографа | 1982 |
|
SU1118960A1 |
| Способ измерения электрического сопротивления или проводимости | 1988 |
|
SU1644045A1 |
| Устройство для раздельного измерения параметров комплексных величин | 1975 |
|
SU521522A1 |
| Способ раздельного измерения параметров комплексных величин | 1979 |
|
SU855508A1 |
| Способ преобразования среднего значения сигнала в код | 1980 |
|
SU951696A1 |
:.
°-/-H--v--r
-i/. U;(
I
1X1А
//.,
