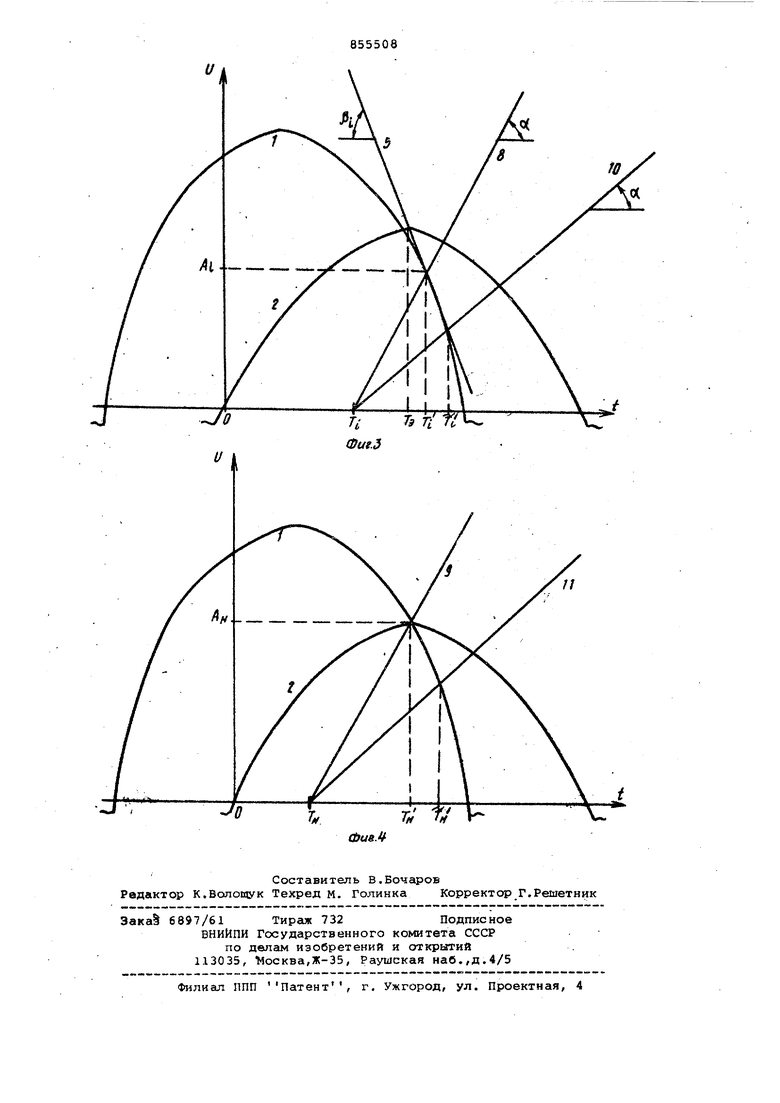
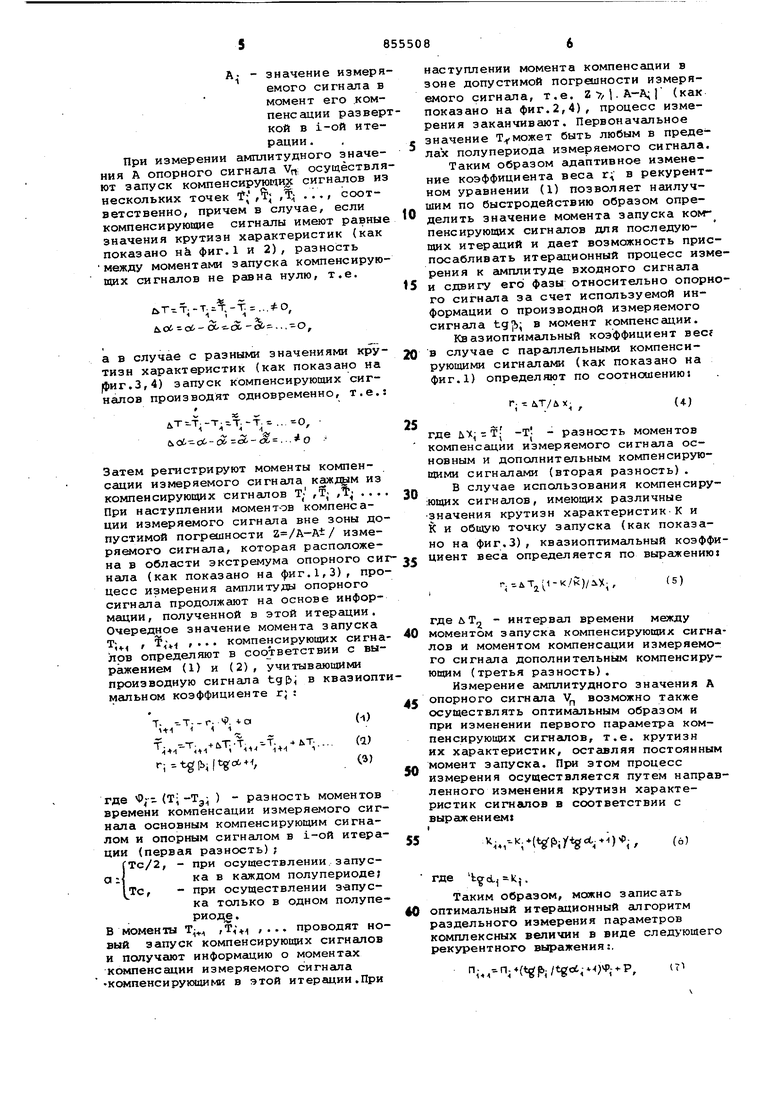
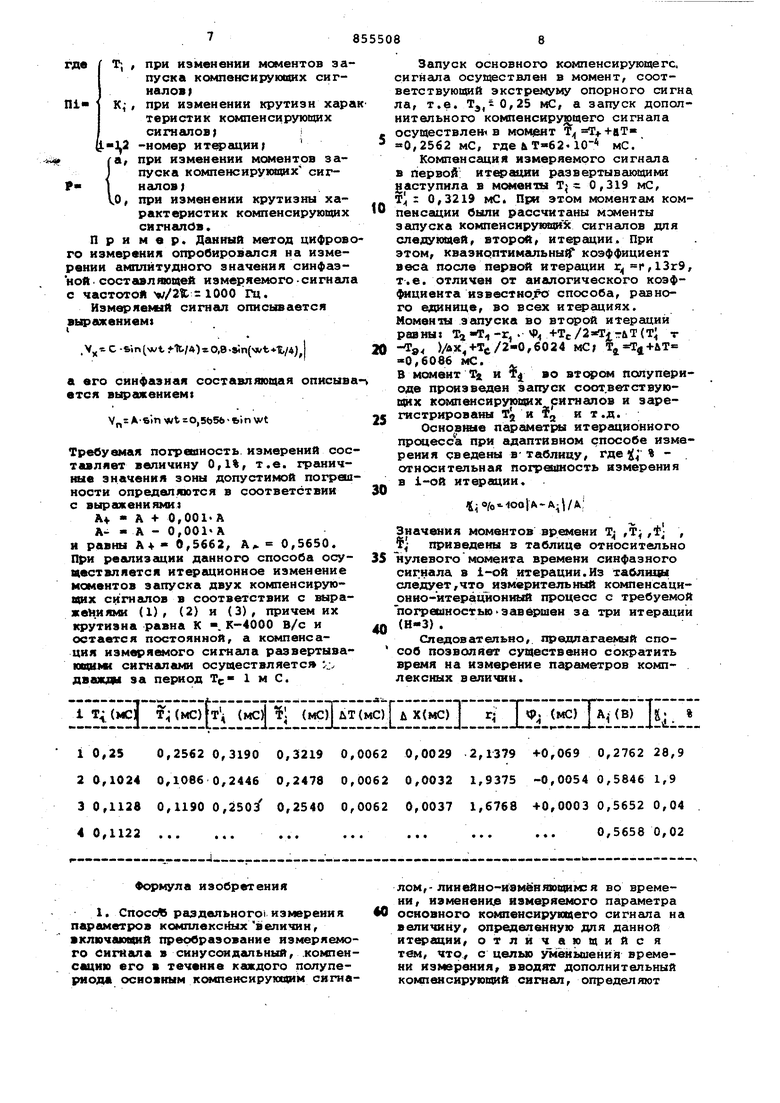
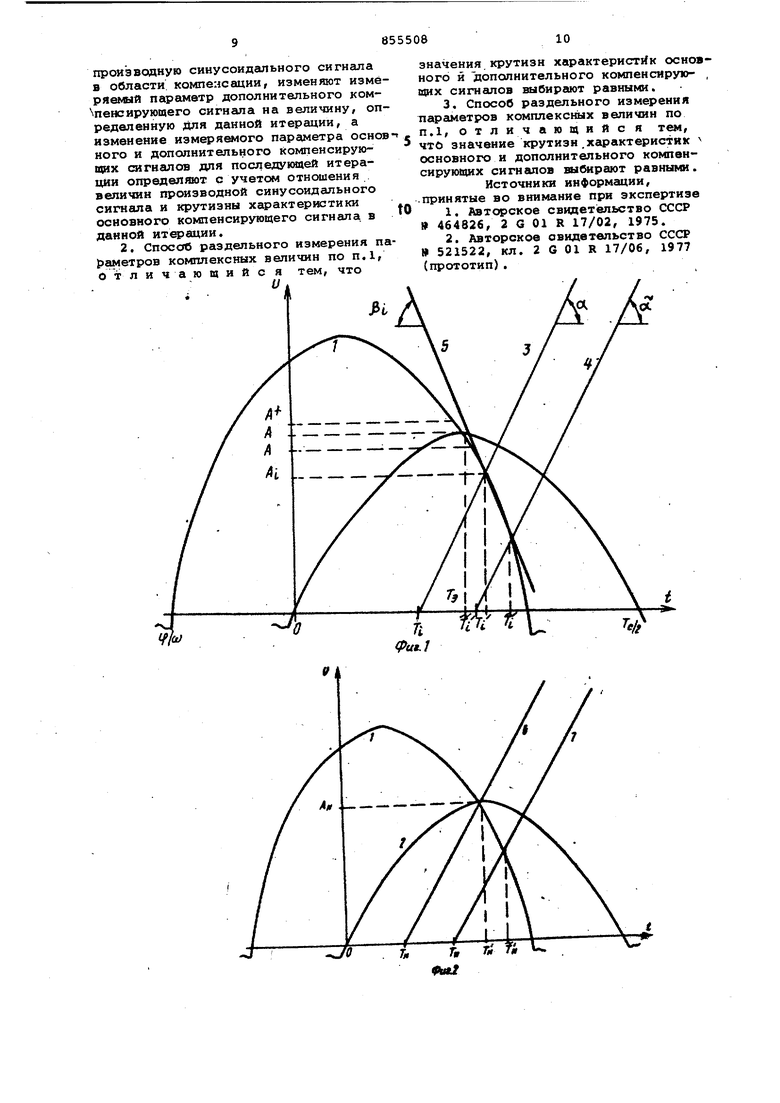
(54) СПОСОБ РАЗДЕЛЬНОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ КОМПЛЕКСНЫХ ВЕЛИЧИН Изобретение относится к электроизмерительной технике и может быаь испольэсвано для раздельного измерения параметров комплексных величи например, для измерения параметров электрических цепей, а также для из мерения неэлектрических величин с помсхаью индуктивных и еккостных пер вичных преобразователей. Известен способ измерения па-г раметрой комплексных величин, осно ванный на компенсации измеряемого сигнала сигналом, пропорционально изменяющимся во времени, заключающийся-в.преобразовании измеряемого сигнала в синусоидальный, компенсации его в течение каждого полупериода компенсирующим сигналом, причем коэффициент пропорциональности компенсирующего сигнала изменяют до тех пор, пока время от начала развертки до момента компенсации не станет равным половине полупериода, после чего измеряют время от начала развертки до момента равенства компенсирующего сигнала заранее заданному уровню С1. Недостатком этого способа является низкая точность, а также длите ное время измерения, так как этот . способ измерения не учитывает формы измеряемого сигнала. Наиболее близким к предлагаемс у техническим решением является способ в котором осуществляется преобразование измерительного сигнала в синусоидальный, компенсация его в течение каждого полупериода основным xott-f пенсирующим сигналом, линейио-изме- . няющимся во времени, изменения измеряемого параметра компенсирующего сигнала на величину, определенную/ для данной итерации, до тех пор, пока последняя разность не будет равна : нулю t 1 Недостатком способа является значительное время измерения. Цель изобретения - уменьшение времени измерения. Поставленная цель достигается тем, что в способ, включающий преобразование измеряемого {с;игнги1а в синусоидальный, компенсацию его в течение каждого полупериода основным компенсирующим сигналом, линейно-изменяющимся во времени,изменение измеряемого параметра основного компенсирующего сигнала на величину, определенную для данной итерации, вводят дополнительный компенсирующий сигнал,. определяют производную синусоидально го сигнала в области компенсации, изменяют измеряемый параметр дополнительного компенсирующего сигнала н величину,определенную для данной ите рации, а изменение измеряемого параметра основного и дополнительного ко пенсирующих сигналов для последующей итерации определяют с учетом отношения величин производной синусоидальн .го сигнала и крутизны характеристики основного компенсирующего Сигнала в данной итерации. Причем, значения крутизн характеристик основного и дополнительного компенсирующих сигналов выбирают либ равными, либо разными. На фиг.1 и 2 показан график адаптивного процесса измерения параметров комплексных величин с использованием двух компенсирующих сигналов, имеющих-равные значения крутизн характеристик для промежуточной i-ой итерации и последней Н-ой итерации соответственно на фиг.З и 4 - график адаптивного процесса измерения параметров комплексных величин с использованием двух компенсирующих сигналов, запускаемых одновременно, но с разными значениями крутизн характеристик для промежуточной i-ой , итерации и последней Н-ой итерации соответственно. На фиг.1 - 4 изображены 1 - измеряемый сигнал: V ;0-5in(Wt + ) A-SinNt/t+b COSswt, где - известная круговая частота опорного сигнэ ла p,. - квадратурная составляю щая) В - амплитуда квадратурной составляющей сигнала, Ч - сдвиг фазы измеряемого сигнала относительно опорного 2- синфазная составляющая измеряемого сигнала: Vp, А .. где А - амплитуда опорного сигнала; 3- основной компенсирующий сигнал в i-ой итерации: V,,-- lt-т-), где K«tgo6- крутизна характеристики основного и дополнительного компенсирующих сиг налов (равные значения) / Т; - значение, момента времени запуска основного компен сирующего сигнала в i-ой итерации; 4гК2,.., номер итерации в процессе измерения, Н - номер итерации, в которой измерен искомый параметр t 4 - дополнительный компенсирующий сигнал в i-ой итерации ), где Т Т« +&Т - значение момента времени запуска дополнительного компенсирующего сигнала в i-ой итерации; ЛТ - отрезок времени,равный интервалу между запусками компенсирующих сигналов; 5 - касательная к измеряемому сигналу в районе компенсации в i-ой итерации; 6,7 - основной и дополнительный сигналы в Н-ой итерации соответственно;8,9 - основной компенсирующий сигнал в 1-ой итерации и Н-той итерации соответственноЛц К-(-т.;; 10,11 - дополнительный компенсирующий сигнал в i-ой итерации соответственно:(,), где () -крутизна характеристики дополнительного компенсирующего сигнала Хразные значения) ; d - разность углов наклона основного at и дополнительного ot компенсирующих сигналов. Кроме этого на фиг.1 - 4 введены следующие обозначения: Т ,T- - значения моментов компенсации измеряемого сигнала в i-ой итерации для основного и дополнительного компенсирующих сигналов соответственно; {5 - угол наклона касательной к измеряемому сигналу в i-ой итерации, которым в точке касания определяется производная сигнгша, Тэ; Tj. (4i-3)/4- iVil - момент времени, соответствующий экстремуму опорного сигнала, при компенсации один раз за период измеряемого сигнала , i;j; l(2i-l)/4- то же, при компенсации два раза за период сигнала Т, , А+., граничные значения зоны допустимой погрешности измерения измеряемого сигнала. А - значение измер емого сигнала момент его .ком пенсации разве кой в i-ой ите рации . При измерении амплитудного значе ния А опорного сигнала Vf,; осуществл ют запуск компенсируюии,; сигналов и нескольких точек f; , ,Ti ... соответственно, причем в случае, если компенсирующие сигналы имеют равны значения крутизн характеристик (ка показано н& фиг.1 и 2), разность между моментами запуска компенсирую щих сигналов не равна нулю, т.е. ьт--т.-гЛ.-т..о, U.Ot ОС-г-СХ ...-Оа в случае с разными значениями кру тизн характеристик (как показано на )фиг.3,4) запуск компенсирующих сигналов производят одновременно, т.е. ,T--T -T --T-f. .. 0, Об СЗб-06 06-«/ . . О Затем регистрируют моменты компенсации измеряемого сигнала каждом из компенсирующих сигналов Т; ,Т; ,Т:- ... При наступлении моментов компенсации измеряемого сигнала вне зоны до пустимой погрешности Z /A-At/ измеряемого сигнала, которая расположена в области экстремума опорного си нала (как показано на фиг.1,3), про цесс измерения амплитуды опорного сигнала продолжают на основе информации, полученной в этой итерации. Очередное значение момента запуска Т;, , ,ч ,... компенсирующих сигна лов определяют в соответствии с выражением (1) и (2), учитывающими производную сигнала tglb в квазиопт мальном коэффициенте rj ; Т- -Т-- г. -Ф. -va iti 1 T.Г-,,,.T,,,--f.. где ;- (Т--Тд- ) - разность моментов времени компенсации измеряемого сигнала основным компенсирующим сигналом и опорным сигналом в i-ой итерации (первая разность); fTc/2, - при осуществлении,запуса-| ка в каждом полупериоде Тс, - при осуществлении запуска только в одном полупериоде . В моменты Т fT,, ,... проводят новый запуск компенсирующих сигналов и получают информацию о моментах компенсации измеряемого сигнгша компенсирующими в этой итерации.При наступлении момента компенсации в зоне допустимой погрешности измеряемого сигнала, т.е. 27/|.А-А;1 (как показано на фиг.2,4), процесс измерения заканчивают. Первоначальное значение Т может быть любым в пределах полупериода измеряемого сигнала. Таким образом адаптивное изменение коэффициента веса г. в рекурентном уравнении (I) позволяет наилучшим по быстродействию образом определить значение момента запуска компенсирующих сигналов для последующих итераций и дает возможность приспосабливать итерационный процесс измерения к амплитуде входного сигнала и сдвигу его фазы относительно опорного сигнёша за счет используемой информации о производной измеряемого сигнала в момент компенсации. Квазиоптимальный коэффициент весг g случае с паргшлельными компенсирующими сигналами (как показано на фиг.1) определяют по соотношению: , где i - Т- -Т- - разность моментов компенсации измеряемого сигнгша основным и дополнительным компенсирующими сигналами (вторая разность). В случае использования компенсиру;ющих сигналов, имеющих различные значения крутизн характеристик-К и К и общую точку запуска (как показано на фиг.З), квазиоптимальный коэффициент веса определяется по выражению: г. :.дт ; 1-к/к)/лХ.,(5) где - интервал времени между моментом запуска компенсирующих сигналов и моментом компенсации измеряемо о сигнала дополнительным компенсирующим (третья разность). Измерение амплитудного значения А опорного сигнала V возможно также существлять оптимальным образом и ри изменении первого параметра коменсирующих сигналов, т.е. крутизн х характеристик, оставляя постоянным омент запуска. Прк этом процесс змерения осуществляется путем направенного изменения крутизн характеистик сигналов в соответствии с ыражением ,(),, (6) де . Таким образом, можно записать птимальный итерационный алгоритм аздельного измерения параметров омплексных величии в виде следующего екурентного выражения:. ,-,.(g|bi/tgot,M)4)-.p,(71 где Т; , при изменении моментов за пуска ксхмпенсирующих сигналов ) П1 К{ , при изменении крутизн хар теристик компенсирующих сигналов) . -номер итерации; га, при изменении чкялетоа за1 пуска компенсирующих сигре налов) VO, при изменении крутизны характеристик компенсирующих сигналов. При мер. Данный метод цифров го измерения опробировался на измерении амплитудного значения синфазной, составляющей измеряемого-сигнал с частотой v/2U 1000 Гц. Измеряемый сигнгш описывается выражением . с -Sir«(wt ,/4)xO,8.;n(,/4), а его синфазная составляющая описыв ется выражением VpZASln ,5b566inWt Требуемая погрешность, измерений сос тавляет величину 0,1%, т.е. граничные значения зоны допустимой погреш ности определяются в соответствии с выражениями А. - А + 0,001-А А- - А - 0,001А и равны А4 « 0,5662, А 0,5650. При реализгщии данного способа осуществляется итерационное изменение моментов запуска двух компенсирующих сигналов в соответствии с выражениями (1), (2) и (3), причем их крутизна равна К . К-4000 В/с и остается постоянной, а компенсация измеряемого сигнала развертыва квцлик сигналами осуществляется :j дважды за период Т 1 м С.
1 T CMCJТ(мС}Гт (Mci 1 (мС)Глт{мС)Гл Х(мС)1 г- Тф (мС)ТА(В) Тц;. %
10,250,2562 0,3190 0,3219 0,0062 0,00292,1379 «0,069 0,2762 28,9
20,10240,1086 0,2446 0,2478 0,0062 0,00321,9375 -0,0054 0,5846 1,9
30,11280,1190 0,250 0,2540 0,0062 0,00371,6768 40,0003 0,5652 0,04
40,1122...............0,5658 0,02
Фсфмула изобретения
1. СпоссК раздельного измерения параметров комплексныхвеличин, включающий преобразование измеряемого сигнала в синусоидальный, .коишенСШ1ИЮ его в течение каждого полупериода основным к(тенсирую1цим CHimaлом,-лииейно-измёвяювцимзя во времени, изменение измеряемого параметра основного компенсирующего сигнала на величину, определенную для данной ит««)ации, oтлич JBlющийc я тем, что, с целью уменьшения времени измерения, вводят дополнительный компенсирующий сигнал, определяют Запуск основного компенсирующего, сигнала осуществлен в момент, соответствующий экстремуму опорного сигна ла, т.е. Тд, 0,25 мС, а запуск дополнительного компенсирующего сигнапа осуществлен в т, Т+. +вТ« 0,2562 мС, гделТ-62.10- мС. Компенсация измеряемого сигнала в первой: разаертывающикш наступила в моменты 0,319 мС, т : 0,3219 мС. При этом моментам компенсации были рассчитаны моменты запуска компенсирукнцн с сигналов для следующей, второй, итерации. При этом, квазноптимальны коэффициент веса после первой итерации ,13г9, т.е. отличен от аиалогического коэф циента известно.ро способа, равного единице, во всех итерациях. Моменты запуска во второй итераций равны Та TI-г. . М) +Те/2 Г гйТ(Т т )/лх Тс/2-0,6024 мС; Т «Т4+ЛТ -0,6086 мС. В TX и Tj во втором полупериоде произведен запуск соот.ветствуюistKx компенсирухнаих ригналов и зарегистрированы Tjt и f2 и т.д. Основше параметцяы итерационного процесса при адаптивном способе измерения сведены в-таблицу, где | % относительная погрешность измерения в i-ой итерещии. 1 в/Ь 10о|А А- /А; Значения моментов времени Т ,Т ,) , Т приведены в таблице относительно 11улевогомо1 нта времени синфазного сигнала в i-ой итерации.Из таблицы следует,что измерительный компенсационно-итерационный процесс с требуемой погрешностью завышен за три итерации (Н-3) . Следовательво, предлагаемый способ позволяет существенно сократить время на измерение параметров ко шлексных величин. производную синусоидального сигнала в области компенсации, изменяют измё ряеквлй параметр дополнительного комNneHCHpynmero сигнала на величину, оп ределенную для данной итерации, а изменение измеряемого параметра осно кого и дополнительного компенсирую1ЦИХ сигналов для последующей итерации определяют с учетом отношения величин производной синусоидального сигнала и крутизны хгфактеристики основного компенсирующего сигнала, в данной итерации. 2. Способ раздельного измерения п раметров комплексных величин по п.1, отличающийс я тем, что значения.крутизн характеристик основного и дополнительного компенсирую- , щих сигналов выбирают равными. 3. Способ раздельного измерения параметров комплексных величин по п.1, отличающийс я тем, что значение крутизн.характеристик основного и дополиительного компенсирующих сигнгшов выбирают равными. Источники информации, .принятые во внимание при зкспертизе 1.Авторское свидетельство СССР 464826, 2 G 01 R 17/02, 1975. 2.Авторское свидетельство СССР О 521522, кл. 2 G 01 R 17/06, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для раздельного измеренияпАРАМЕТРОВ КОМплЕКСНыХ ВЕличиН | 1979 |
|
SU845105A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И ПОДАВЛЕНИЯ ФИЗИЧЕСКИХ ПРОЦЕССОВ (ПОЛЕЙ) ОКРУЖАЮЩЕЙ СРЕДЫ САМОНАСТРАИВАЮЩИМСЯ ОПОРНЫМ ПРОЦЕССОМ (ПОЛЕМ) | 2008 |
|
RU2391678C2 |
| СПОСОБ ОЦЕНКИ АМПЛИТУДНОЙ И ФАЗОВОЙ ЧАСТОТНЫХ ХАРАКТЕРИСТИК СИСТЕМ УПРАВЛЕНИЯ | 2000 |
|
RU2191420C2 |
| СПОСОБ ИЗМЕРЕНИЯ РЕЗОНАНСНОЙ ЧАСТОТЫ | 2018 |
|
RU2691291C1 |
| СПОСОБ КОМПЕНСАЦИИ ИСКАЖЕНИЯ СИГНАЛА В ИЗЛУЧАЮЩЕЙ ПОЛЕЗНОЙ НАГРУЗКЕ | 2008 |
|
RU2467467C2 |
| Способ компенсации емкостных токов в электрических сетях с изолированной нейтралью | 2023 |
|
RU2806893C1 |
| Устройство для геологоразведки | 1979 |
|
SU807190A1 |
| СПОСОБ ОДНОВРЕМЕННОГО ИЗМЕРЕНИЯ ДАЛЬНОСТИ, СКОРОСТИ И УСКОРЕНИЯ МАЛОСКОРОСТНОЙ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ ПРИ ВЫСОКОЙ ЧАСТОТЕ ПОВТОРЕНИЯ ИМПУЛЬСОВ И ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИИ | 2018 |
|
RU2692912C1 |
| Способ итерационного измерения рассогласования в двумерных следящих системах и устройство для его осуществления | 2019 |
|
RU2733262C1 |
| Автоматическое устройство для измерения динамических характеристик аналого-цифровых преобразователей | 1976 |
|
SU605313A1 |