Известны устройства для измерения момента сопротивления на валу, например, синхронного электродвигателя, содержаш,ие датчики электрической мощности и рабочего угла, дифференцирующий элемент и электронномоделирующий механизм.
Предложенное устройство отличается от известных тем, что испытуемый синхронный электродвигатель, являющийся структурным звеном, включен через датчики электрической мощности и .рабочего угла и дифференцирующий элемент в электронно-моделирующий механизм, состоящий из интегратора с цепочкой RC, сумматора и усилителя-инвертора, выход которого соединен со входом регистратора и через сопротивление со входом интегратора. Это позволяет повысить точность измерения с учетом внутренних параметрх)в электродвигателя.
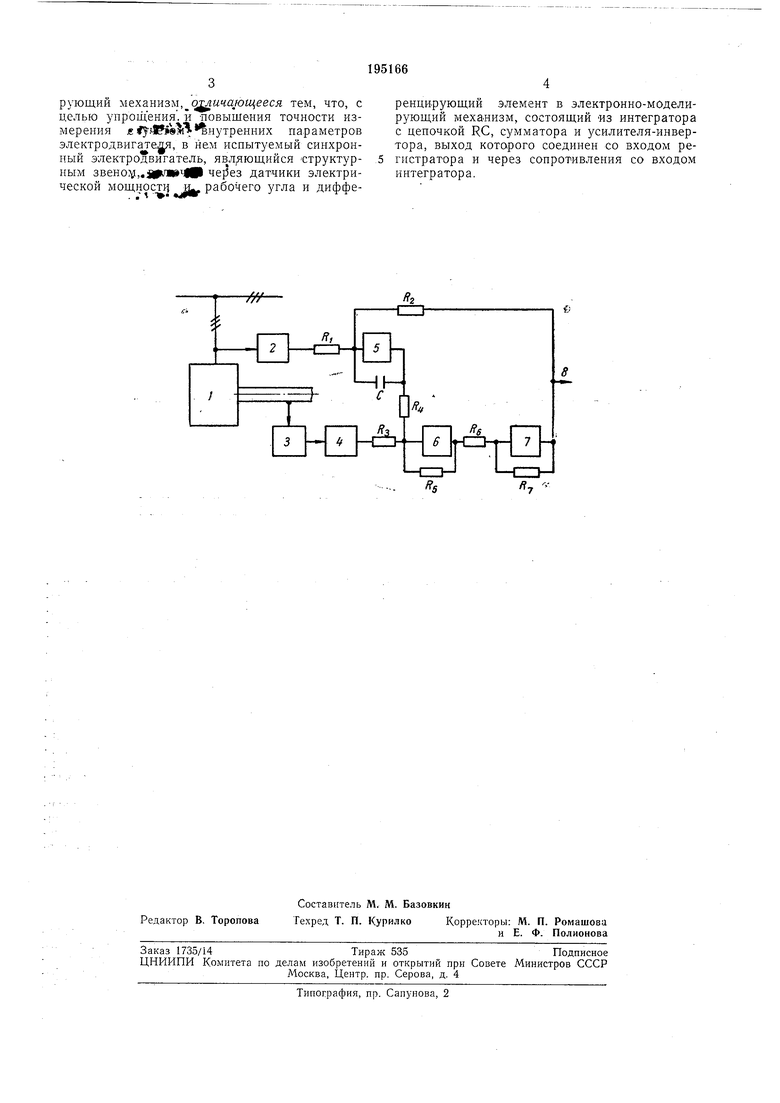
На чертеже приведена блок-схема устройства.
Устройство содержит испытуемый синхронный электродвигатель /, включенный с помощью датчика лшщности 2, датчика рабочего угла 3 и дифференцирующего элемента 4 в схему остальной части модели. Схема состоит из интегрирующего усилителя 5, суммирующего усилителя 6 и усилителя-инвертора 7, направление с которого подается на выход или иа регистратор (на чертеже не показан).
Такое включение в схему решающего устройства исследуемого электродвигателя упрощает технику измерений, так как исключает необходимость принятия специальных мер для учета ряда внутренних параметров электродвигателя, которые при этом учитываются в неявном виде.
Потери в статоре синхронного электродвигателя здесь учитываются в схеме датчика мощности путем введения сопротивлений в цени трансформаторов тока, вызывающих снижение снгнала на выходе датчика, пропорциональное падению напряжения на активном сопротивлении статора. Потери в железе электродвигателя могут быть учтены в виде некоторой постоянной величины.
Устройство позволяет одновременно с величиной момента сопротивления получать информацию также и о мощности, потребляемой из сети, рабочем угле и его первой и второй производных.
Предмет изобретения
Устройство для измерения момента сопротивления на валу, например, синхронного электродвигателя, содержащее датчики электрической мощности и рабочего угла, дифференцирующий элемент и электронно-моделирующий механизм,(Ш1ичшощееся тем, что, с целью упрощения , и -повышения точности измерения Je y l s1 i нyтpeнниx параметров электродвигате гя, в нем испытуемый синхронный электродвигатель, являющийся -структурным звеном,«spinee ei через датчики электрической мощности и.- рабочего угла и диффе. 1 j
ренцирующий элемент в электронно-моделирующий механизм, состоящий «з интегратора с цепочкой RC, сумматора и усилителя-инвертора, выход которого соединен со входом регистратора и через сопротивления со входом интегратора.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВ РАССОГЛАСОВАНИЯ | 1966 |
|
SU182230A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1046864A1 |
| Вентильный электродвигатель | 1973 |
|
SU660158A1 |
| Способ управления бесщеточной синхронной машиной | 1988 |
|
SU1624657A2 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| АВТОМАТИЧЕСКИЙ КОМПЕНСАЦИОННЫЙ МНОГОТОЧЕЧНЫЙ ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН | 1968 |
|
SU220356A1 |
| Система управления пылесосом | 1991 |
|
SU1771684A1 |
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
| Устройство для измерения магнитногопОТОКА элЕКТРОдВигАТЕля пЕРЕМЕННОгО TOKA | 1979 |
|
SU836749A1 |