Изобретение относится к гироскопической технике, а именно к способам управления бесколлекторным двигателем постоянного тока и снижения дрейфа.
Известно устройство [1] для управления бесколлекторным двигателем постоянного тока, стабилизации его частоты вращения и коррекции дрейфа гироскопа, содержащее статор 1, ротор 4 на сферической шарикоподшипниковой опоре, датчики угла 6 и датчики момента 7, включающее также два датчика положения ротора 3, устройство стабилизации частоты вращения ротора 10, два усилителя мощности 13, 14, выход каждого из которых подключен к фазным обмоткам статора 2 электродвигателя гироскопа, измеритель дрейфа 17, подключенный к датчику угла гироскопа; между стабилизатором частоты вращения и усилителями мощности включены сумматоры 11, 12, на дополнительные входы которых поступают сигналы с регулировочных резисторов 15, 16, позволяющие компенсировать дрейф гироскопа, а также постоянные составляющие электрических токов в фазных обмотках статора двигателя гироскопа.
Недостатком этого устройства является наличие больших составляющих постоянных электрических токов в фазных обмотках, обусловленных асимметрией переменного прямоугольного напряжения питания на выходах усилителей мощности; в рассматриваемой конструкции двухосного гироскопа с ротором на сферической шарикоподшипниковой опоре это приводит к дополнительной составляющей дрейфа, связанной с управляющим воздействием постоянной составляющей магнитного поля фазных обмоток на ротор. Асимметрия вызвана скважностью импульсов с выходов датчиков положения ротора (датчиков Холла), не равной 2, из-за разброса порогов переключения этих датчиков и искажений формы вращающегося магнитного поля от постоянных магнитов ротора гироскопа.
Наличие данного явления приводит еще и к необходимости формирования для компенсации составляющей дрейфа, обусловленной асимметрией фазных напряжений, больших постоянных токов в фазных обмотках с помощью регулировочных резисторов, что приводит к ухудшению теплового режима датчика. Кроме того, существует температурная нестабильность скважности датчиков положения ротора, обусловленная зависимостью их порогов переключения и индукции магнитного поля от температуры, приводящая, соответственно, к температурной нестабильности дрейфа.
Технический результат заключается в улучшении точностных параметров гироскопа и их стабильности, а также в улучшении его температурного режима.
Задача, на решение которой направлено изобретение, заключается в снижении составляющей дрейфа, обусловленной неидеальной скважностью выходных сигналов датчиков Холла, снижении температурной нестабильности дрейфа, вызванной нестабильностью их скважности, и снижении энергопотребления фазными обмотками гироскопа.
Поставленные задачи решаются за счет изменения способа управления фазными обмотками в пусковом и рабочем режимах. В устройство для управления бесколлекторным двигателем постоянного тока, стабилизации его частоты вращения и коррекции дрейфа гироскопа, содержащее статор, ротор на сферической шарикоподшипниковой опоре, датчики угла и датчики момента, включающее также два датчика положения ротора, два усилителя мощности, выход каждого из которых подключен к фазным обмоткам статора электродвигателя гироскопа, измеритель, подключенный к датчику угла гироскопа, два сумматора на входах усилителей мощности, регулировочные резисторы, подключенные к дополнительным входам сумматоров, согласно изобретению, введен новый стабилизатор частоты вращения ротора, состоящий из кварцевого генератора, формирователя двухфазной последовательности импульсов, вход которого соединен с выходом кварцевого генератора, частотного компаратора, первый вход которого соединен с выходом формирователя двухфазной последовательности импульсов, второй вход - с выходом одного из датчиков Холла, а выход - с первым входом устройства форсированного управления и перезапуска, коммутатора, первые два входа которого соединены с выходами датчиков Холла, вторые два - с выходами формирователя двухфазной последовательности импульсов, а два выхода управляют электронными ключами, соединенными с входами сумматоров на входах усилителей мощности; входы электронных ключей подключены к выходам третьего сумматора и инвертора. Первый вход третьего сумматора соединен с выходом управляемого источника опорного напряжения, второй - с выходом фазового детектора, третий вход - с выходом устройства форсированного управления и перезапуска; две пары входов фазового детектора соединены с выходами формирователя двухфазной последовательности импульсов и с выходами датчиков Холла. Второй выход устройства форсированного управления и перезапуска соединен с входами управляемого источника опорного напряжения и коммутатора, второй вход - с выходом фазового детектора.
Отличительным признаком заявленного изобретения является изменение принципа работы устройства в рабочем режиме, который исключает влияние неидеальной скважности выходных сигналов датчиков Холла на работу фазных обмоток статора и величину дрейфа, а также введение устройства форсированного управления и перезапуска для обеспечения устойчивого вращения ротора гироскопа в рабочем режиме при внешних механических возмущениях.
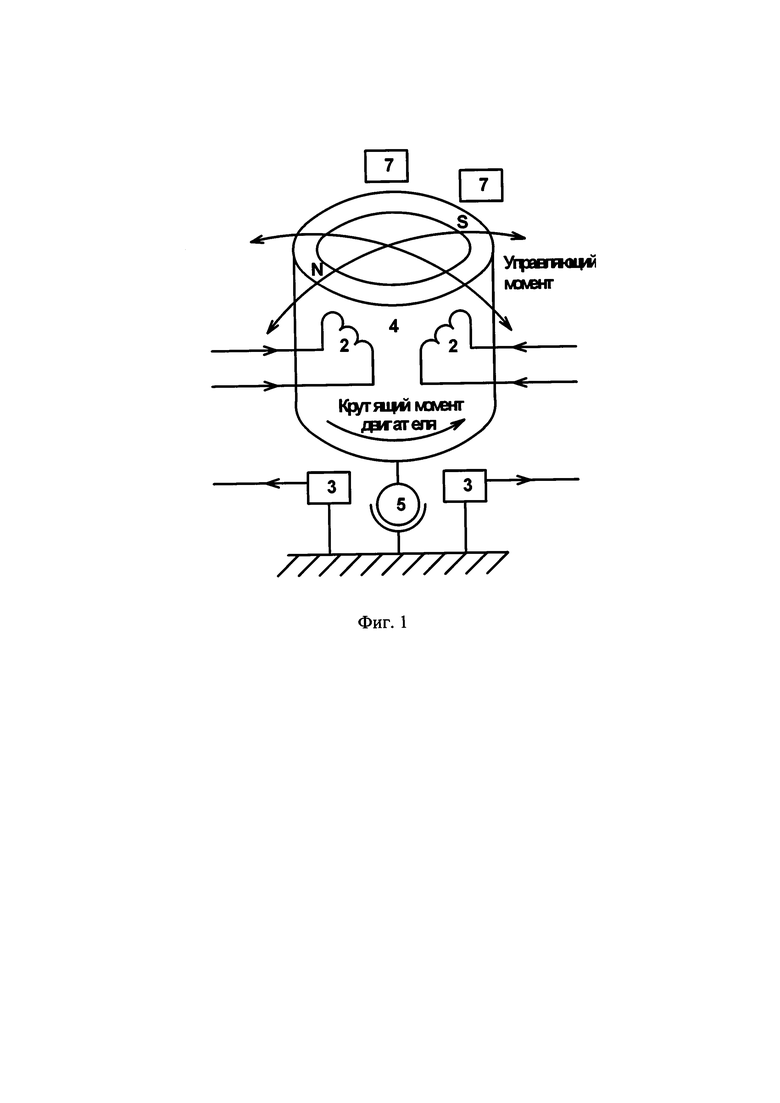
На фиг. 1 изображена упрощенная структурно-кинематическая схема гироскопа.
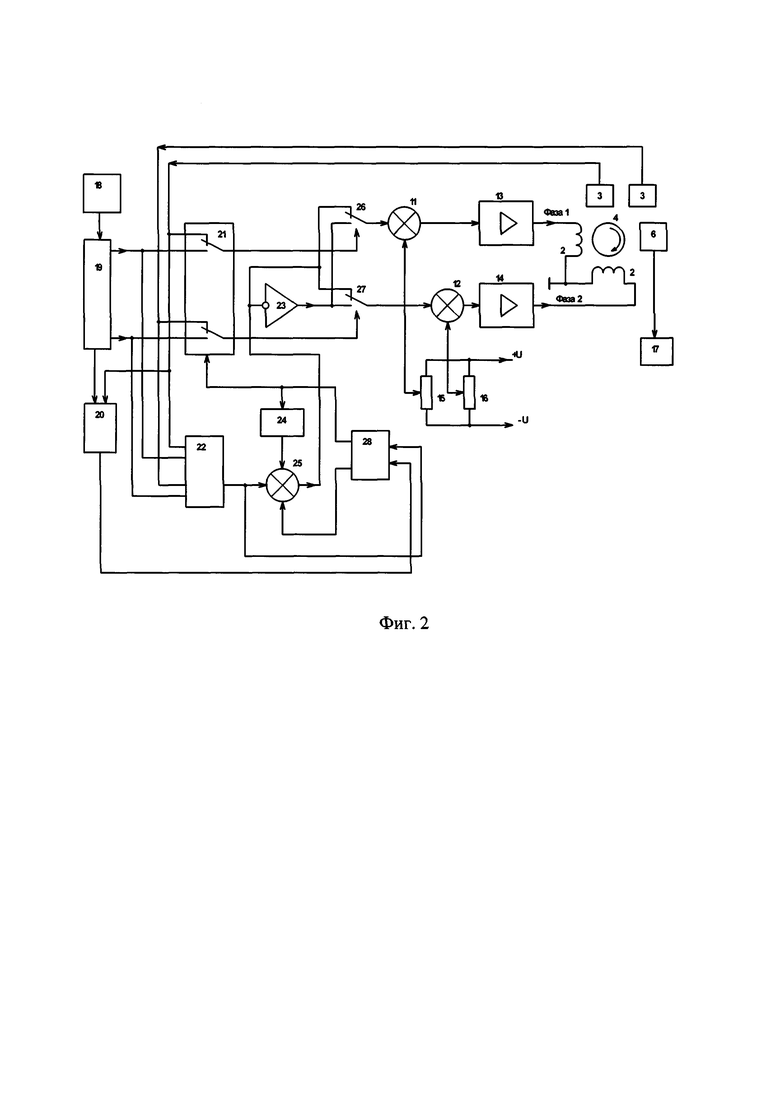
На фиг. 2 изображена структурная схема устройства для коррекции дрейфа гироскопа.
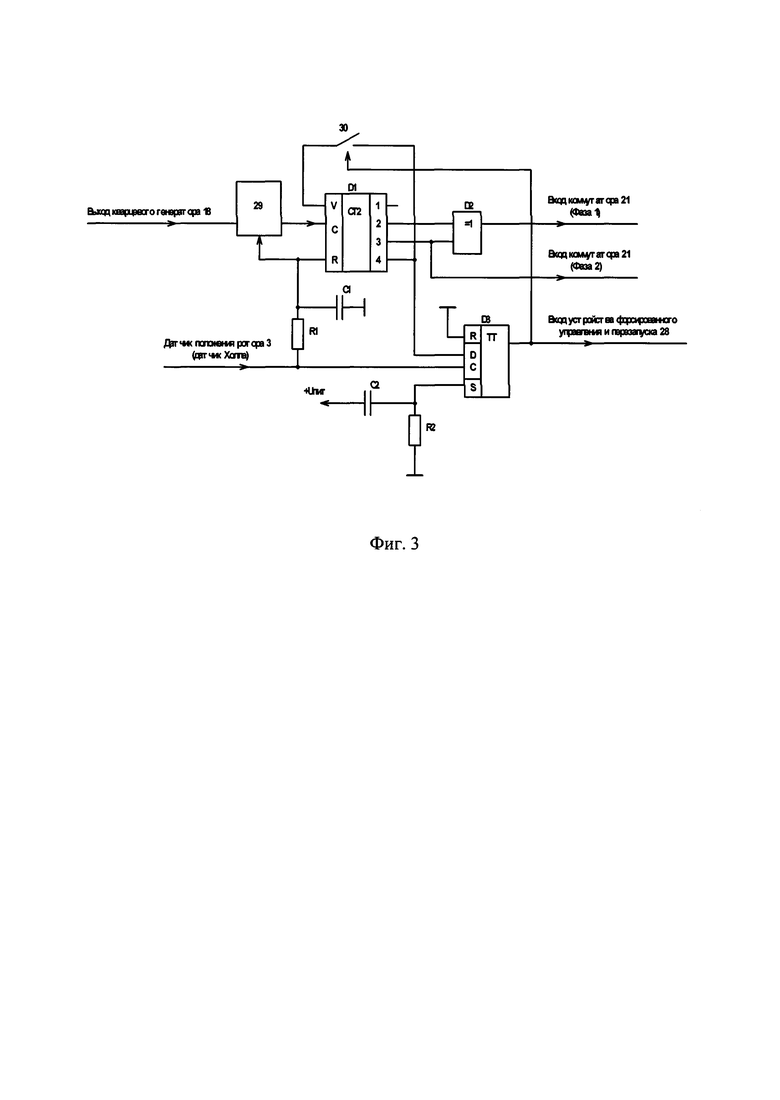
На фиг. 3 изображена схема формирователя двухфазной последовательности импульсов и частотного компаратора.
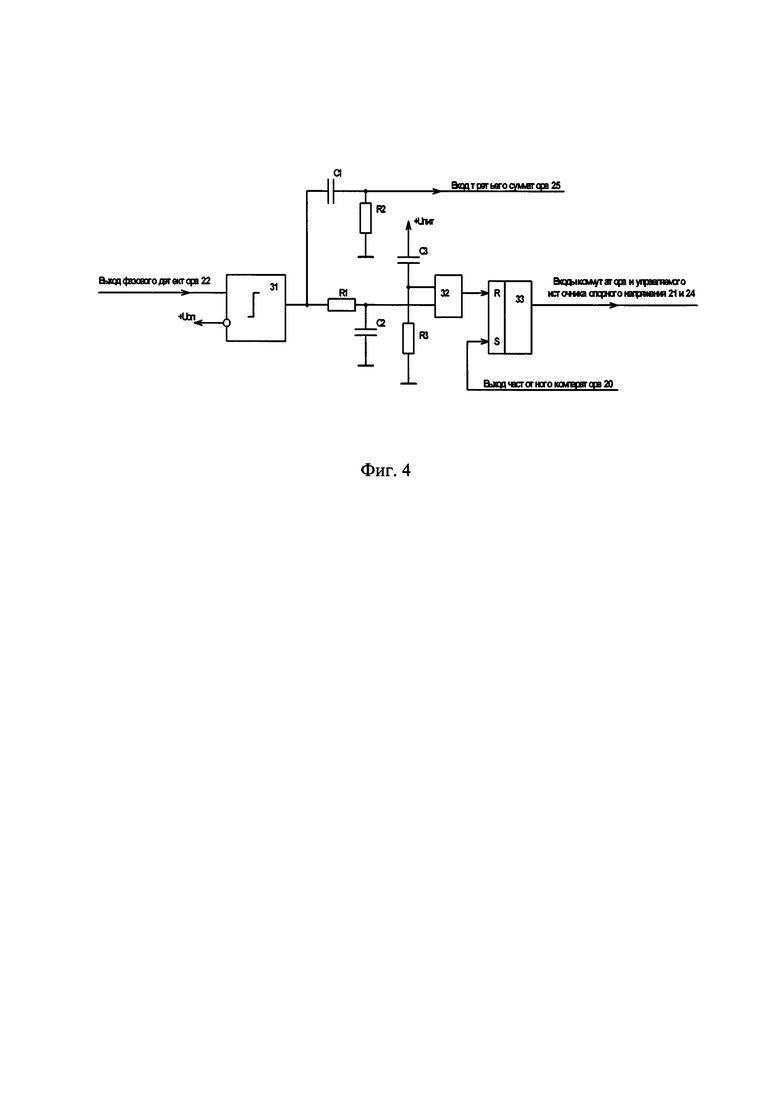
На фиг. 4 изображена структурная схема устройства форсированного управления и перезапуска.
На фиг. 1 приведена структурно-кинематическая схема гироскопа, состоящего из ротора 4 на сферической шарикоподшипниковой опоре 5 (ротор представляет собой кольцевой магнит, намагниченный в радиальном направлении с внешним магнитопроводом, который на фиг. 1 условно не показан; также не показаны датчики угла 6), датчиков момента электромагнитного типа 7 для управления прецессией ротора в пространстве по двум взаимноперпендикулярным осям, фазных обмоток статора 2 и датчиков положения ротора 3, расположенных в зазоре между магнитом и магнитопроводом. При наличии постоянных электрических токов в фазных обмотках, как было указано выше, они, кроме основного крутящего момента ротора, создают управляющий момент аналогично датчикам момента, а, следовательно, и дрейф гироскопа. Направление и величина дрейфа при этом определяются направлением постоянных составляющей токов фазных обмоток и их величиной.
Пример реализации устройства для коррекции дрейфа гироскопа.
На фиг. 2 изображено устройство для коррекции дрейфа гироскопа, содержащее кварцевый 18 генератор (КГ), формирующий стабильную частоту для работы формирователя 19 двухфазной последовательности импульсов (ФДПИ). Два прямоугольных переменных напряжения со скважностью равной 2 и, сдвинутые относительно друг друга на 90°, подаются на входы коммутатора 21. Работой коммутатора управляет частотный 20 компаратор (ЧК) совместно с устройством 28 форсированного управления и перезапуска (УФУП). В режиме пуска ротор гироскопа работает в режиме бесколлекторного двигателя постоянного тока - на входы сумматоров 11 и 12 поступают сигналы с выходов третьего сумматора 25 и инвертора 23 через электронные 26, 27 ключи (ЭК), управляемые сигналами с выходов датчиков Холла 3; при этом амплитуда переменных прямоугольных напряжений на входах усилителей мощности 13, 14 определяется величиной постоянного напряжения на выходе управляемого 24 источника опорного напряжения (УИОН) и в данном режиме максимальная. При достижении скорости вращения номинального значения (рабочий режим) переключается уровень сигнала на выходе ЧК и к управляющим входам ЭК подключаются сигналы с выхода ФДПИ и одновременно снижается амплитуда на выходе третьего сумматора и инвертора за счет переключения величины постоянного напряжения на выходе УИОН.
Отличительным признаком заявленного изобретения является переключение ротора гироскопа из режима бесколлекторного двигателя постоянного тока при пуске в режим синхронного двигателя при рабочем режиме. При рабочем режиме фазные обмотки питаются переменными прямоугольными напряжениями со скважностью, которая определяется сигналами с выходов ФДПИ и всегда равна 2 независимо от скважности импульсов с выходов датчиков Холла. Для обеспечения устойчивой работы электродвигателя гироскопа на второй вход третьего сумматора подается постоянное напряжение с выхода фазового 22 детектора (ФД), которое, суммируясь с выходным напряжением УИОН, обеспечивает увеличение амплитуды фазных напряжений в случае отставания положения ротора от напряжений питания и соответственно уменьшение в случае опережения, при нестабильной величине суммарного момента сопротивления вращению ротора. Постоянную величину выходного напряжения УИОН в рабочем режиме можно регулировать, в зависимости от величины суммарного момента сопротивления вращению, для обеспечения минимальной мощности потребления фазными обмотками статора электродвигателя гироскопа. Указанное переключение режимов работы электродвигателя гироскопа обеспечивает одновременно максимальную скорость разгона ротора гироскопа при пуске и исключение составляющей дрейфа, обусловленной неидеальной скважностью фазных напряжений при рабочем режиме, а также повышение температурной стабильности дрейфа. Также, отсутствие необходимости компенсации постоянной составляющей токов фазных обмоток при этом обеспечивает снижение энергопотребления.
На фиг. 3 изображена схема формирователя двухфазной последовательности импульсов и частотного компаратора, содержащая делитель 29 частоты (ДЧ), сигнал с выхода которого поступает на вход собственно ФДПИ, выполненного на счетчике D1 и логическом элементе "исключающее ИЛИ" D2. Сигнал с выхода 4 счетчика D1 поступает на вход "D" частотного компаратора на триггере D3. При каждом прямом фронте сигнала с датчика положения ротора (датчика Холла) записывается состояние выхода 4 счетчика D1 в триггер D3 - таким образом, происходит сравнение образцовой частоты с частотой датчика Холла (частота вращения): при пуске частота с датчика Холла ниже образцовой и на выходе 4 D1 успевает появиться логическая "1" в момент записи в триггер, при достижении частоты вращения номинального значения или выше - записывается логический "О", и далее через устройство форсированного управления и перезапуска происходит переключение коммутатора и УИОН. При подаче питания на устройство триггер D3 принудительно устанавливается в состояние логической "1" через цепь R2C2. Для подготовки счетчика D1 и ДЧ к следующему циклу сравнения частот (цикл происходит при каждом обороте гиромотора) они обнуляются после записи в триггер с небольшой задержкой через цепь R1C1. Для исключения ложного переключения триггера при частоте вращения, много ниже номинальной (при циклическом изменении состояния выхода 4 D1 в момент сравнения частот), счетчик D1 самоблокируется по входу разрешения счета V через замкнутый электронный ключ 30, при переключении триггера D3 в состояние логического "0" самоблокировка снимается. Особенностью работы схемы ФДПИ является синхронизация его выходных сигналов с соответствующими сигналами с датчиков Холла в момент переключения режимов, необходимая для обеспечения в этот момент минимального рассогласования положения вектора вращающегося магнитного поля и ротора гироскопа; это обеспечивается за счет синхронизации начала формирования двухфазной последовательности ФДПИ с сигналом с датчика Холла при обнулении D1 и ДЧ в пусковом режиме, через цепь R1C1.
На фиг. 4 изображена структурная схема устройства форсированного управления и перезапуска, содержащая компаратор 31, выход которого при превышении выходного напряжения ФД опорного +Uоп (при отставании ротора гироскопа от вектора вращающегося магнитного поля статора, которое может быть вызвано воздействием на гироскоп углового ускорения по оси вращения ротора, больше допустимого для синхронного двигателя) переключается в состояние высокого уровня; при этом дифференцирующая цепь C1R2 формирует на входе третьего сумматора импульс для форсированного увеличения амплитуды фазных напряжений. Введение в устройство этой схемы обусловлено тем, что значительное увеличение коэффициента передачи по цепи ФД - третий сумматор невозможно ввиду ухудшения устойчивости следящей системы по углу рассогласования. При больших и длительных внешних угловых воздействиях, которые могут привести к выходу синхронного электродвигателя из режима синхронизма и его последующей остановке, одновременно с форсированием амплитуды фазных напряжений, происходит установка триггера 33 в состояние логического "О" (в состояние логической "1" после завершения пускового режима триггер устанавливается логическим уровнем на выходе триггера D3 ЧК), соответствующего для устройства режиму пуска, через цепь R1C2 и логический элемент "ИЛИ" 32; при этом происходит повторный разгон электродвигателя до номинальной частоты вращения, и затем - снова переключение устройства в рабочий режим. Цепь R1C2 определяет порог чувствительности УФУП по времени предельного воздействия на ротор гироскопа. В состояние логического "О" при подаче питания на устройство триггер устанавливается через цепь R3C3.
Источники информации
1. Патент РФ №2572501, МПК G01C 25/00, приоритет от 06.10.2014 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ ДРЕЙФА ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572501C1 |
| КОММУТАТОР ДЛЯ ДВУХФАЗНОГО БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ | 1999 |
|
RU2153760C1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором и устройство для его осуществления | 1987 |
|
SU1515323A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БЕСКОЛЛЕКТОРНЫМ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2173931C1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Электропривод | 1985 |
|
SU1332427A1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1972 |
|
SU327552A1 |
Изобретение относится к гироскопической технике, в частности к способам управления бесколлекторным двигателем постоянного тока и снижения дрейфа. Сущность изобретения заключается в изменении способа управления бесколлекторным двигателем постоянного тока в пусковом и рабочем режимах; для этого в устройство введен новый стабилизатор частоты вращения ротора, состоящий из кварцевого генератора, формирователя двухфазной последовательности импульсов, частотного компаратора, устройства форсированного управления и перезапуска, коммутатора, электронных ключей, сумматора, инвертора, управляемого источника опорного напряжения и фазового детектора, позволяющий снизить дрейф гироскопа и повысить его температурную стабильность, а также снизить энергопотребление фазными обмотками гироскопа. Технический результат - улучшение точностных параметров гироскопа и их стабильности, а также улучшение его температурного режима. 4 ил. 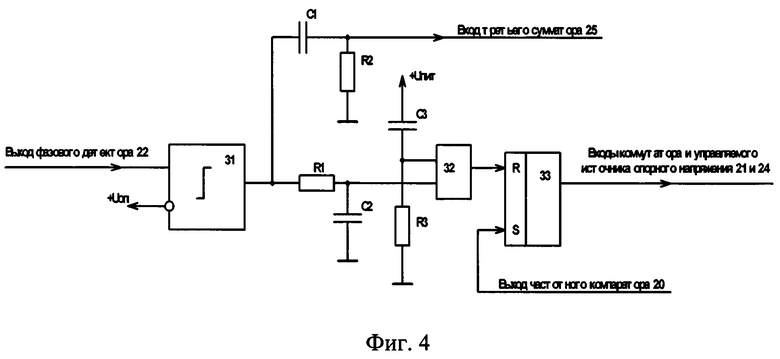
Устройство для управления бесколлекторным двигателем постоянного тока, стабилизации его частоты вращения и коррекции дрейфа гироскопа, содержащее статор, ротор на сферической шарикоподшипниковой опоре, датчики угла и датчики момента, включающее также два датчика положения ротора, два усилителя мощности, выход каждого из которых подключен к фазным обмоткам статора электродвигателя гироскопа, измеритель, подключенный к датчику угла гироскопа, два сумматора на входах усилителей мощности, регулировочные резисторы, подключенные к дополнительным входам сумматоров, отличающееся тем, что введен новый стабилизатор частоты вращения ротора, состоящий из кварцевого генератора, формирователя двухфазной последовательности импульсов, вход которого соединен с выходом кварцевого генератора, частотного компаратора, первый вход которого соединен с выходом формирователя двухфазной последовательности импульсов, второй вход - с выходом одного из датчиков Холла, а выход - с первым входом устройства форсированного управления и перезапуска, коммутатора, первые два входа которого соединены с выходами датчиков Холла, вторые два - с выходами формирователя двухфазной последовательности импульсов, а два выхода управляют электронными ключами, соединенными с входами сумматоров на входах усилителей мощности; входы электронных ключей подключены к выходам третьего сумматора и инвертора; при этом первый вход третьего сумматора соединен с выходом управляемого источника опорного напряжения, второй - с выходом фазового детектора, третий вход - с первым выходом устройства форсированного управления и перезапуска; две пары входов фазового детектора соединены с выходами формирователя двухфазной последовательности импульсов и с выходами датчиков Холла; одновременно второй выход устройства форсированного управления и перезапуска соединен с входами управляемого источника опорного напряжения и коммутатора, второй вход - с выходом фазового детектора.
| СПОСОБ КОРРЕКЦИИ ДРЕЙФА ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572501C1 |
| СПОСОБ КОРРЕКЦИИ ДРЕЙФА ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410658C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |

