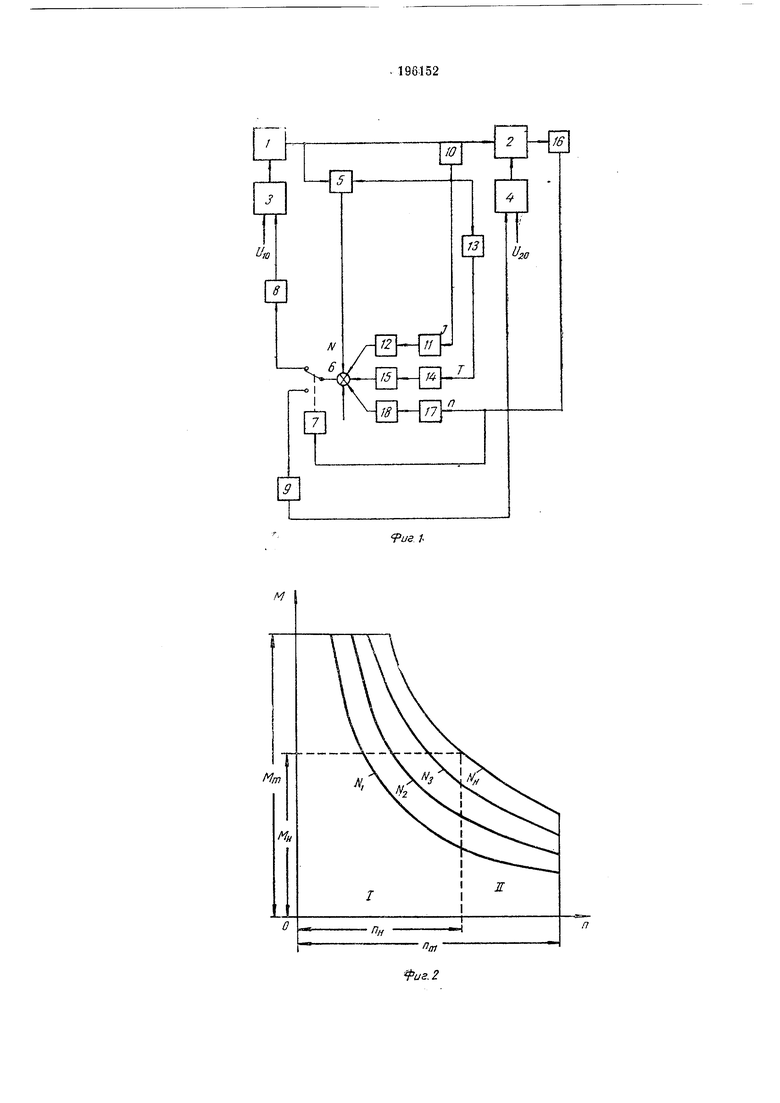
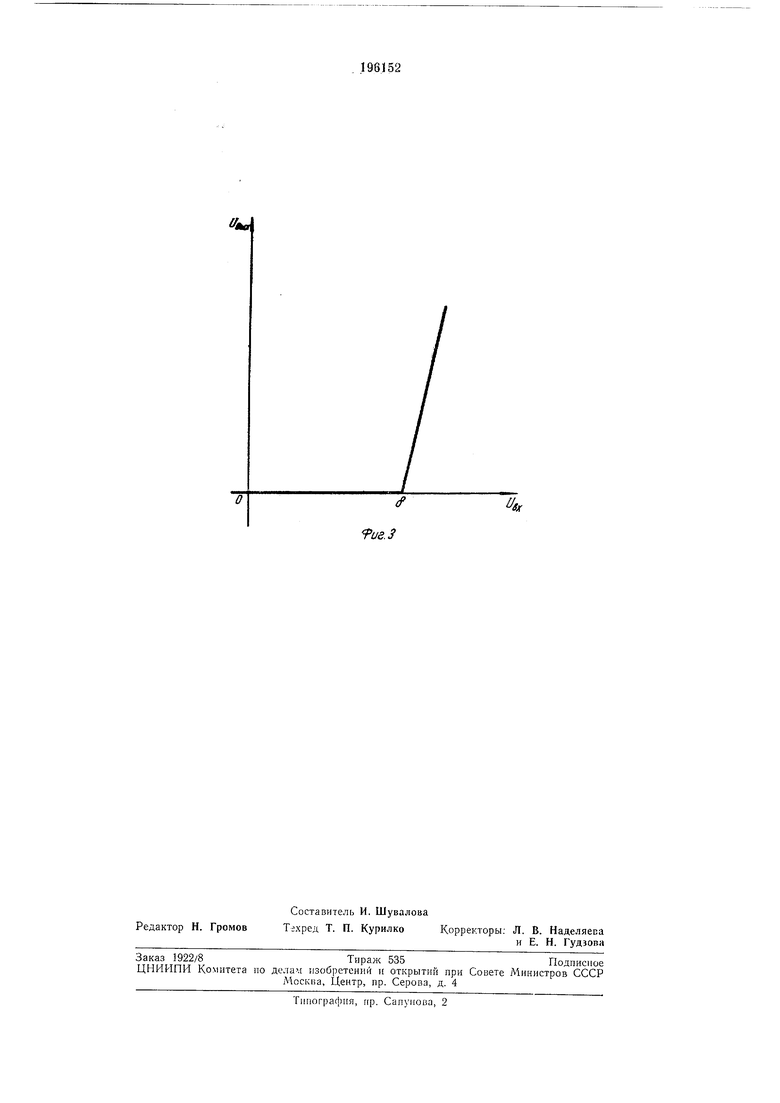
Известны способы автоматического регулирования мощности электроприводов типа генератор - двигатель, основанные на раздельном возбуждении либо генератора, либо двигателя. Однако эти снособы нозволяют управлять мо1н,ностью электропривода, если зарапее достаточно полно заданы условия и режимы его работы привода. Предлагаемый способ позволяет автоматически регулировать мопишсть электропривода как по цепи возбуждения двигателя, так н по цепи возбуждеиия генератора в зависимости от TeKyntero режима работы агрегата Для этого выбирают опорное значепие мопдности генератора, исходя из оценки характера уелоВИЙ работы привода, и измеряют текущие значения мощности генератора и скорости вращения вала. При скорости вращения вала, меньшеи номинальной, регулируют возбуждение генератора, а при скорости вращеиия вала, большей номинальпой, регулируют возбуждепие двигателя, ненрерывно поддерживая опорное значение мон;ности генератора. Для повышения надежности нривода при работе в области моментов нагрузок, температуры нагрева, главного тока двигателя и скорости вращения его вала, выходящих за расчетные границы, измеряют температуру пагрева двигателя и значение его главного тока и непрерывно корректируют величину опорной MOHUIOCTH генератора, поддерживая предельно допустимые значения температуры нагрева, главного тока двигателя и скорости вращения его вала. Па фиг. I изображена блок-схема устройства для реализации предлагаемого способа; на фиг. 2 - осиовные характеристики двигателя и нагрузки; на фиг. 3 - характеристика усилителей с иастраиваемой зоной нечувствительности. Схема содержит: генератор /; двигатель 2: устройство 3 возбуждения генератора; устройство 4 возбуждения двигателя; датчик 5 мои;ности; сравнивающее ycTpoiicTBO б; реле 7 переключения регулирующих органов; стабилизирующее устройство 8 по каналу управления возбуждепием генератора; стабнлизирующее устройство 9 по каналу управлепия возбуждением двигателя; датчик 10 тока; усилитель // с настраиваемой зоной нечувствительности; стабнлизирующее устройство 12 в цепи регулирования тока; устройство 13 вычислення темнературы; усилитель 14 с настраиваемой зоной нечувствительности; стабилизирующее устройство 15 в цепи регулирования темнературы; датчик 16 скорости вращения; усилите.ль 17 с настраиваемой зоной нечувствительности; стабнлизирующее устройство 18 в цени регулирования скорости вран1,епня.
Зона нечувствительности (см. фиг. 3) соответствует максимально допустимому значению главного тоКа /т у4И|Лителя 11, максимально допустимей ;| темпёратуре нагрева Т для усилителя 14 имаксИмально допустимой скорости в.ра11,Ш 1 дл д усилителя 17.
Когда приволгрЗШУтает в области расчетных допустимых моментов нагрузки и скорости вращения, ограниченных пределами М„ а п (фиг. 2), действует канал регулирования заданной мощности NoiNi, NZ, N3, Nn). Эта область разбита на две зоны. В зоне I возбуждение двигателя остается равным номинальному значению U-zo (Фд Фдн соп81), а возбуждение генератора изменяется таким образом, чтобы выполнялось условие . В зоне II возбуждение генератора остается равным f/io, а меняется возбуждение двигателя (). Границей зон является линия п„ номинальной скорости вращения двигателя.
Процесс регулирования протекает, как в обычной системе, по отклонению AN- No-Л, действующему в зоне I по каналу управления возбуждением генератора, а в зоне II - по каналу управления возбуждением двигателя. Переход с одного канала на другой осуществляется с помощью реле 7, на вход которого поступает сигнал с датчика 16 скорости вращения. Разбиение области регулирования на две зоны позволяет с помощью машин меньшей мощности, чем установленная, охватить больщую область работы.
В рассмотренной области работы сигналы на выходе каналов регулирования главного тока, температуры и скорости вращения отсутствуют. Как только нагрузка превысит максимальный момент Л1„, а следовательно, и значение главного тока I (М С Фд /, где Фд const) превысит предельно допустимый 1 , на выходе усилителя 11 появится сигнал, который, пройдя через стабилизирующее устройство 12, измепит заданную мощность и выберет такую характеристику N, при которой / /,„. Таким орбазом, усилитель 11 в этом случае выполняет функции двух звеньев: коммутирующего элемента и сравнивающего устройства.
Сигнал рассогласования A/ на выходе усилителя // всегда имеет один и тот же знак в отличие от обычных систем регулирования. Это позволяет осуществить естественный переход в область нормальной работы после исчезновения возмущения на валу двигателя. В рассматриваемом режиме автоматически собирается каскадная схема регулирования тока.
Работа с моментами нагрузки, длительно превышающими номинальное значение, но не достигающими максимальио допустимых значений, вызывает повышенный нагрев машины. Когда температура Г нагрева на выходе устройства 13 достигает предельно допустимого значения Г,, на выходе усилителя 14 появится сигнал, пропорциональный рассогласованию , который через стабилизирующее устройство 15 ограничивает мощность //о до величины, соответствующей . Ограничение по температуре может действовать совместно с ограничением по току, что вполне допустимо, так как оба ограничения действуют в сторону снижения заданной мощности.
Температура нагрева электродвигателя может быть вычислена на основе простейщего уравнения теплового баланса:
kr; dt
Т -- ,
где: Э - постоянная времени нагрева; к - коэффициент пронорциональности, зависящий от сопротивления обмоток и коэффициента теплоотдачи; т - температура перегрева; toKp температура окружающей среды.
Таким образом, для вычисления температуры необходимы три блока: квадратор, апериодическое звено и сумматор. Для тех приводов, которые снабжены устройствами измерения температуры, необходимость в вычислеНИИ темнературы отпадает, и система регулирования упрон,ается.
Работа канала регулирования предельно допустимой скорости вращения двигателя идентична действию каналов тока и температуры.
В качестве стабилизирующих устройств для блоков 8, 9, 12 и 15 могут быть использоваиы пропорциональные звепья, для блока 18 - пропорционально-дифференцирующее звено.
Предмет изобретения
1.Способ автоматического регулирования мощности электронривода типа генератор - двигатель, основанный па раздельном возбуждении генератора и двигателя, отличающийся
тем, что, с целью расширения функциональных возможностей привода при его работе в области расчетных допустимых моментов нагрузки и скорости вращения вала двигателя, выбирают опорное значение мощностн генератора, исходя из оценки характера условий работы нривода, измеряют текущие значения мощности генератора и скорости вращения вала и при скорости вращения вала, меньщей номинальной, регулируют возбуждение генератора, а нри скорости вращения вала, превышающей номинальную, регулируют возбуждение двигателя, поддерживая непрерывно опорное значение мощности генератора.
2.Способ но п. 1, отличающийся тем, что, с целью повышения надежности работы привода нри его работе в области моментов нагрузок, температуры нагрева, главного тока двигателя и скорости вращения его вала, выходящих за расчетные границы, измеряют
темнературу нагрева двигателя и значение его главного тока и непрерывно корректируют величину опорной мощности генератора, поддерживая предельно допустимые значения температуры нагрева, главного тока двигате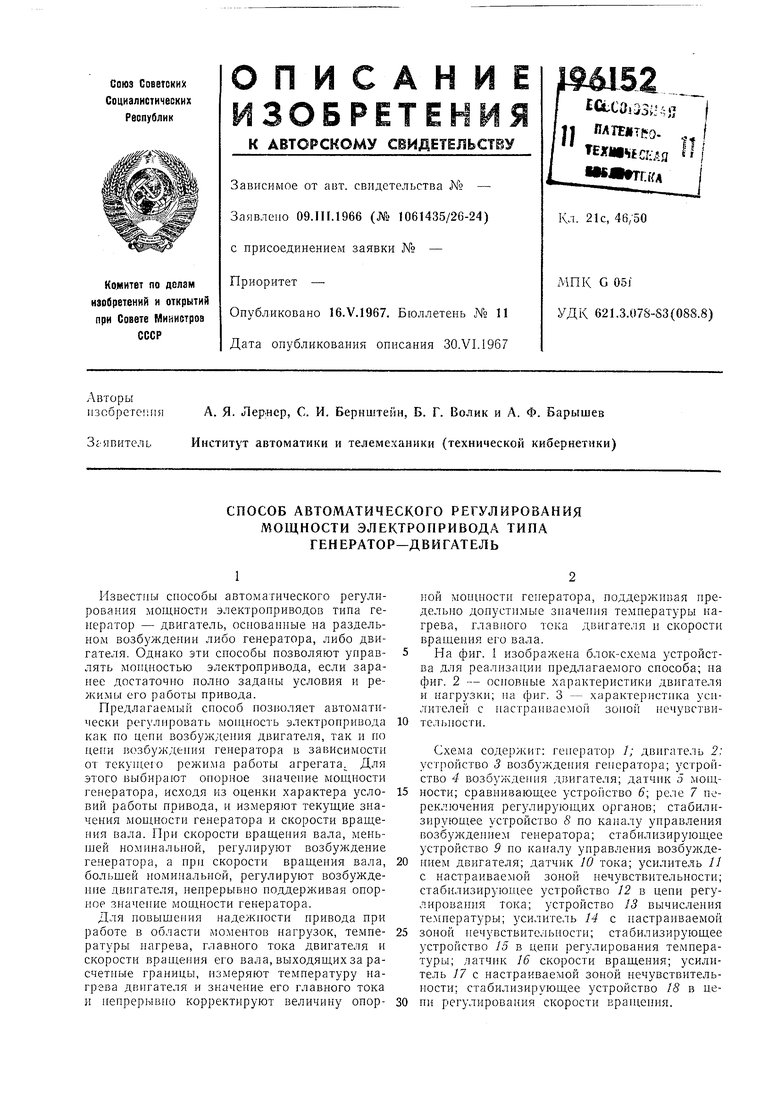
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПО СИСТЕМЕ Г—Д С ДВУХЗОННЫМ РЕГУЛИРОВАНИЕМ | 1973 |
|
SU388337A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ НАПРЯЖЕНИЯ, ПРОГРАММИРОВАНИЯ И РАСПРЕДЕЛЕНИЯ АКТИВНОЙ НАГРУЗКИ МЕЖДУ РАЗНОТИПНЫМИ ИСТОЧНИКАМИ ЭЛЕКТРОЭНЕРГИИ СУДНА | 2019 |
|
RU2753704C2 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Электропривод бурового станка | 1989 |
|
SU1641969A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2385528C1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| Астатический регулятор частоты вращения | 1977 |
|
SU738085A1 |
| УСТРОЙСТВО ИСПЫТАНИЙ ЧАСТОТНО-УПРАВЛЯЕМОГО ГРЕБНОГО ЭЛЕКТРОПРИВОДА СИСТЕМЫ ЭЛЕКТРОДВИЖЕНИЯ В УСЛОВИЯХ СТЕНДА | 2011 |
|
RU2462728C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2015040C1 |