Известны способы измерения коэффициента самовыравнивания, основанные на сравнении откликов объекта я модели при скачкообразном входном воздействии.
Особенностью предложенного способа является то, что преобразуют входное воздействие одновременно двумя интегрирующими моделями с разными коэффициентами усиления, попарно сравнивают отклики каждой модели с откликом объекта, фиксируют интервал времени от момента подачи входного воздействия до момента равенства какой-либо пары откликов и запоминают номер модели, отклик которой сравнялся с откликом объекта. По величине интервала времени судят о значении коэффициента самовыравнивания, а по номеру модели определяют егр знак.
Это позволяет ускорить процесс измерения и повысить его точность как нри устойчивом, так и нри неустойчивом объекте регулирования.
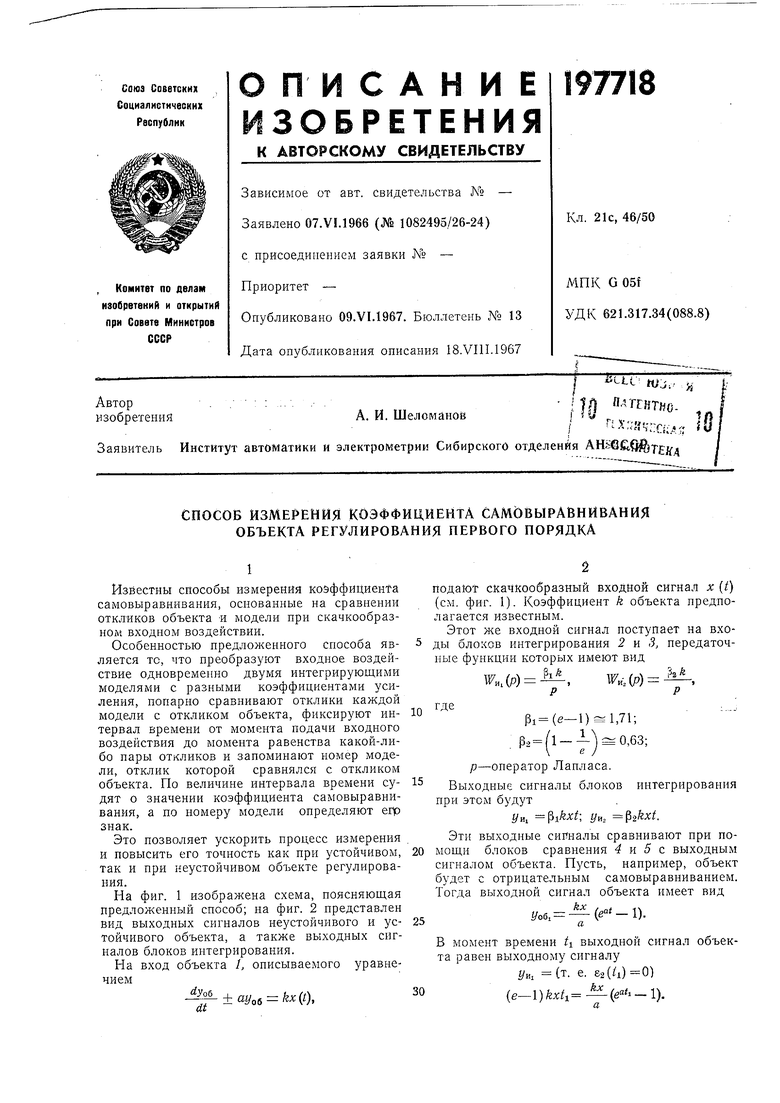
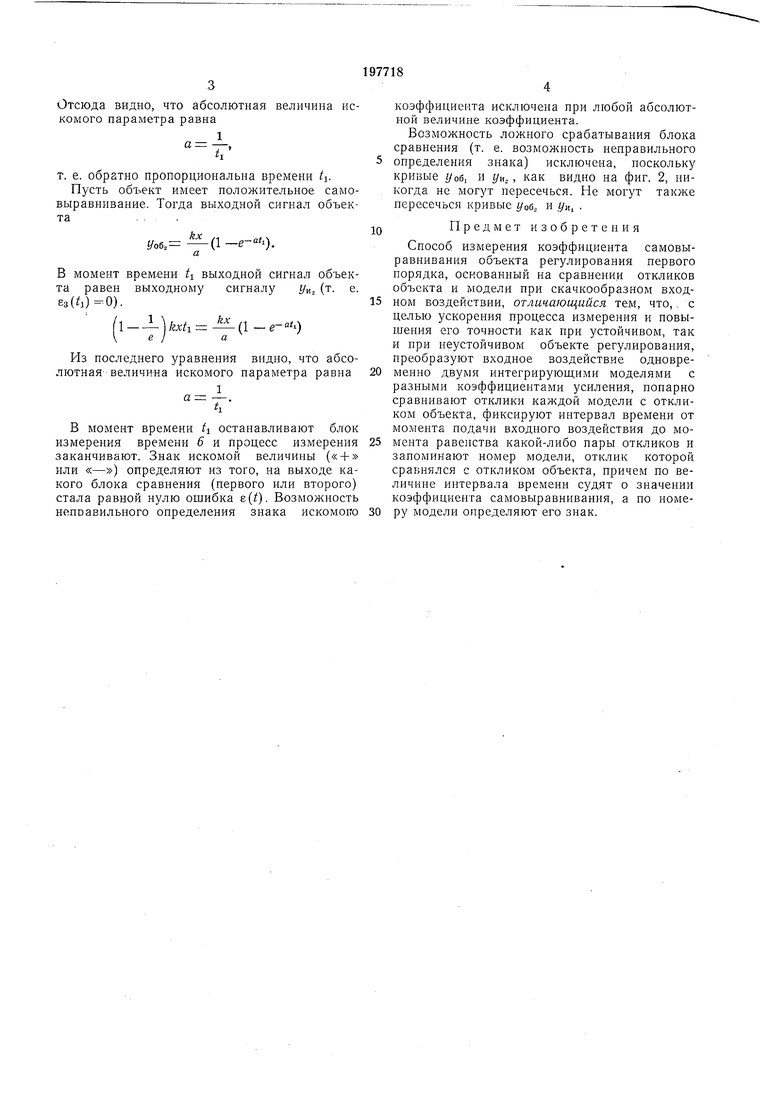
Па фиг. 1 изображена схема, поясняющая предложенный способ; на фиг. 2 представлен вид выходных сигналов неустойчивого и устойчивого объекта, а также выходных сигналов блоков интегрирования.
подают скачкообразный входной сигнал х (t) (см. фиг. 1). Коэффициент k объекта предполагается известным.
Этот же входной сигнал поступает на входы блоков интегрирования 2 и 3, нередаточные функции которых имеют вид
W.(p} ,
W.,(p)
где
10
|3i (6-1)1,71; p, ,63;
p-оператор Лапласа.
Выходные сигналы блоков интегрирования нри этом будут
г/и ikxf; г/и, .
Эти выходные сравнивают при помощи блоков сравнения 4 и 5 с выходным сигналом объекта. Пусть, например, объект будет с отрицательным самовыравииванием. Тогда выходной снгнал объекта имеет вид
ЬУ
г/об. (е«-1).
В момент времени t выходной сигнал объекта равен выходному снгналу
Отсюда видно, что абсолютная величина искомого параметра равна
1
т. е. обратно пропорциональна времени t.
Пусть объект имеет положительное самовыравнивание. Тогда выходной сигнал объекта- . .
kx ,1
-at,Уоб, -(1
В момент врем.ени t выходной сигнал объекта равен выходному сигналу г/и., (т. е. ез(1)0).
11 (. /kx :
-ati
1kxti -(1 - I
еа
Из последнего уравнения видно, что абсолютная величина искомого параметра равна 1
С1 -
1
в момент времени ti останавливают блок измерения времени 6 и процесс измерения заканчивают. Знак искомой величины (« + или «-) определяют из того, на выходе какого блока сравнения (первого или второго) стала равной нулю ошибка s(t). Возможность непоавильного определения знака искомопо
коэффициента исключена при любой абсолютной величине коэффициента.
Возможность ложного срабатывания блока сравнения (т. е. возможность неправильного определения знака) исключена, носкольку кривые г/об, и г/и, , как видно на фиг. 2, никогда не могут пересечься. Не могут также пересечься кривые у об., и .г/и, .
Предмет изобретения
Способ измерения коэффициента еамовыравнивания объекта регулирования первого порядка, основанный на сравнении откликов объекта и модели при скачкообразном входном воздействии, отличающийся тем, что,. с целью ускорения процесса измерения и повышения его точности как при устойчивом, так и нри неустойчивом объекте регулирования, преобразуют входное воздействие одновременно двумя интегрируюш,ими моделями с разными коэффициентами усиления, попарно сравнивают отклики каждой модели с откликом объекта, фиксируют интервал времени от момента подачи входного воздействия до момента равенства какой-либо пары откликов и запоминают номер модели, отклик которой с откликом объекта, причем по величине интервала времени судят о значении коэффициента самовыравнивания, а по номеру модели определяют его знак.
УоЬ,Уи
)1
„±L.
-H б
Ц ,