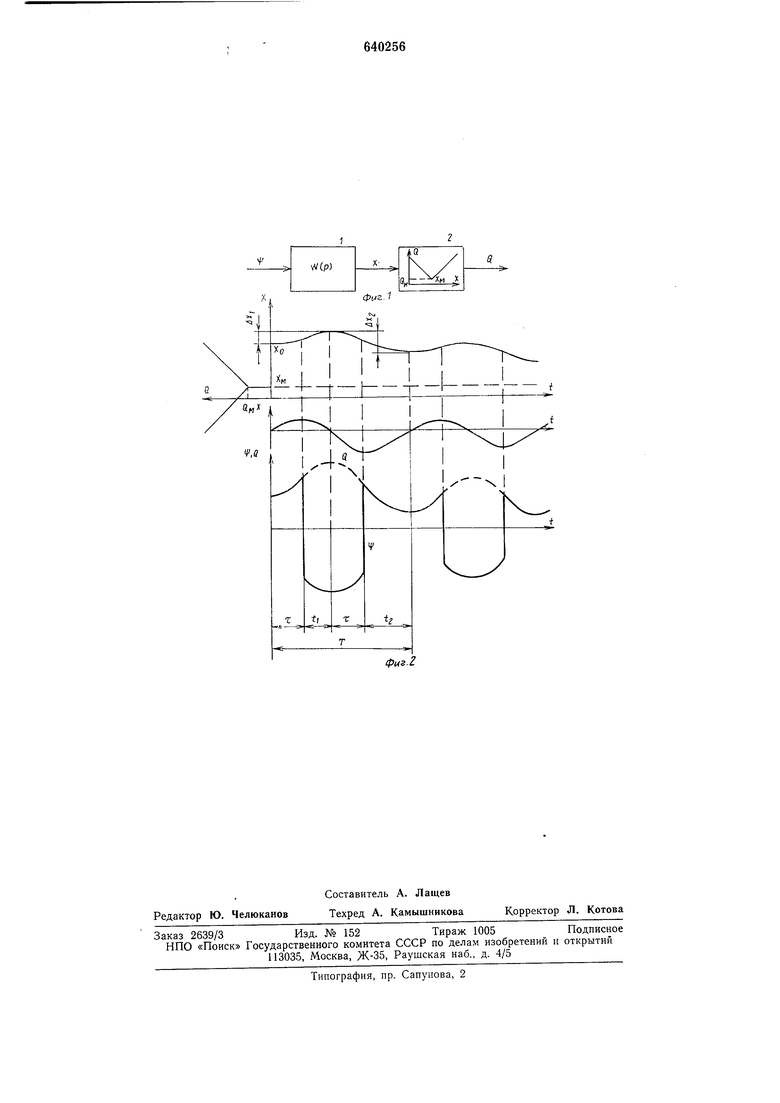
щиеся в процессе работы значения пронзвольнон комбннации знаков, т. е. объект может быть как устойчивым (, ), так и неустойчивым (один из коэффициентов а, b или оба одиовремецно меньше нуля). Причем выход X линейного звена не наблюдаем. Процесс поиска минимума Q ноясняется для нейтрального объекта (a ). Поисковые шаги цо X образуются за счет изменения знака обратной связи с задержкой на ностоянный интервал времени но отношению к моментам изменения знака нервой производной Q от выходной величины объекта Q, а не по отношению к моментам изменения знака X. Для сходимости процесса поиска к экстремуму Q необходимо знак обратной связи изменять с запаздыванием по отношению к моментам изменения знака X. Для обеепечения этого условия выходной сигцал объекта умножают на знак произведения входного сигнала v|; X и второй ироизводной Q от выхода объекта. Тогда фактически знак обратной связи будет определяться не только знаком Q, но и знаком произведения i|-Q. Покажем, что цри таком способе организации знака обратной связи происходит его изменение в соответствии с изменеиием знака X. Для этого преобразуем произведение с учетом А :: sign Q sign (6 Q) - sign Q sign (X Q) Q ( sign (X - Х„) + Q«, lf Xsign(X-X, ,Q Xsign(X-X,,} и очевидных соотношений sign sign a - sign a, sign (ab) - sign a sign b, (signaY . Получим A sign X sign (X - X)l X Xsigu X-X.sign(X-X) sign X-sign {X-X)X X signtATj- X) singn, T. e. произведение знаков величин, доступных для измерения, Q и )Q совпадает со знаком производной X от ненаблюдаемой величины X. На фиг. 2 показаны врелченныс диаграммы величин А , X, ij; л Q при поиске минимума Q в соответствии с предложенным способом для , а также статическая характеристика (X) нелинейного звена. Предноложим, что в начальный момент времени / 0 производная выхода линейного звена равна нулю , а входная еличина обьекта по.чожительна i|5 KQA. Тогда X начнет изменяться в сторолу от экстремума Q (). Через интервал т производят изменение знака обратной связи. Это приводит к изменению знака входного воздействия г|; с положительного на отрицательный, что уменьшает скорость изменения X и приводит к изменению ее знака через интервал времени ti. Затем отрицательное значение X увеличивается по абсолютной величине в течение интервала времени т, по прошествии которого снова изменяют знак обратной связи, тем самым подавая на вход объекта опять Q. Это приводит к уменьшению абсолютной величины скорости X и изменению ее знака через интервал времени tz. В результате такого способа управления в объекте устанавливаются поисковые колебания. На интервале времени T-p/i производится шаг AXi по координате X от экстремума, а на интервале - шаг Д.2 к экстремуму. Поскольку знак обратной связи изменяют с запаздыванием по отношению к моментам изменения знака X то движение от экстремума создается меньшими амплитудными значениями входного воздействия i|5|i /(Q, че.м движение к экстремуму. Это и приводит в среднем к смещению в сторону экстремума за один цикл поиска Г 2тЧ-i-ti+tz, т. е. ,. Предложенный способ экстремального управления обесиечивает оптимизацию выхода объектов первого рода второго порядка при отсутствии информации с выхода линейной части. Благодаря этому достигается расширение функциональных возможностей способа по сравнению с известным техническим решением. Формула изобретения Способ экстремального управления объектами с линейным динамическим звеном второго порядка и нелинейным статическим звеном, основанный на формировании управляющего сигнала посредством изменения знака сигнала обратной связи, отличающийся тем, что, с целью расщирения функциональных возможностей способа, умножают сигнал второй производной выходного сигнала на входной сигнал, определяют сигиал знака полученного нроизведения и сигнал зиака первой производной выходого сигнала, сдвинутого по фазе, и полуенные сигналы умножают на сигнал обратной связи. Источники информации, нринятые во внимание при экспертизе 1.Растригин Л. А. Системы экстремалього управления, «Наука, 1974. 2.Авторское свидетельство СССР 549785, кл. G 05В 13/02, 1977.
фцг.2