Известно стационарное устройство для измерения напоров и углов скоса векторов скорости в пограничном слое при исследовании воздушных винтов.
Однако устройства такого типа дают возможность исследовать только жестко закрепленные лопасти на втулке винта, не обеспечивают заданной точности установки нриемника давления, неточны при измерениях, сложны и имеют большие габариты и большой вес (особенно механизма нривода).
Предложенное устройство обеспечивает измерение напоров и углов скоса вектора скорости в пограничном слое при исследовании упругой машуш,ей лопасти, шарнирно закрепленной во втулке винта, например, вертолета. Устройство, устанавливаемое непосредственно в лопасти, обеспечивает дистанционное управление неремепдением приемника давления с требуемой точностью его установки и передачу результатов измерения с минимальной ошибкой.
Достигается это тем, что оно выполнено в виде малогабаритного прибора и снабжено двумя дистанционно и независимо управляемыми электродвигателями, перемещаюш ими посредством механических преобразователей приемник давления, храповыми и стопорными механизмами, обеопечивающи.мн заданную точность установки приемника, и преобразователем давления в электрический сигнал.
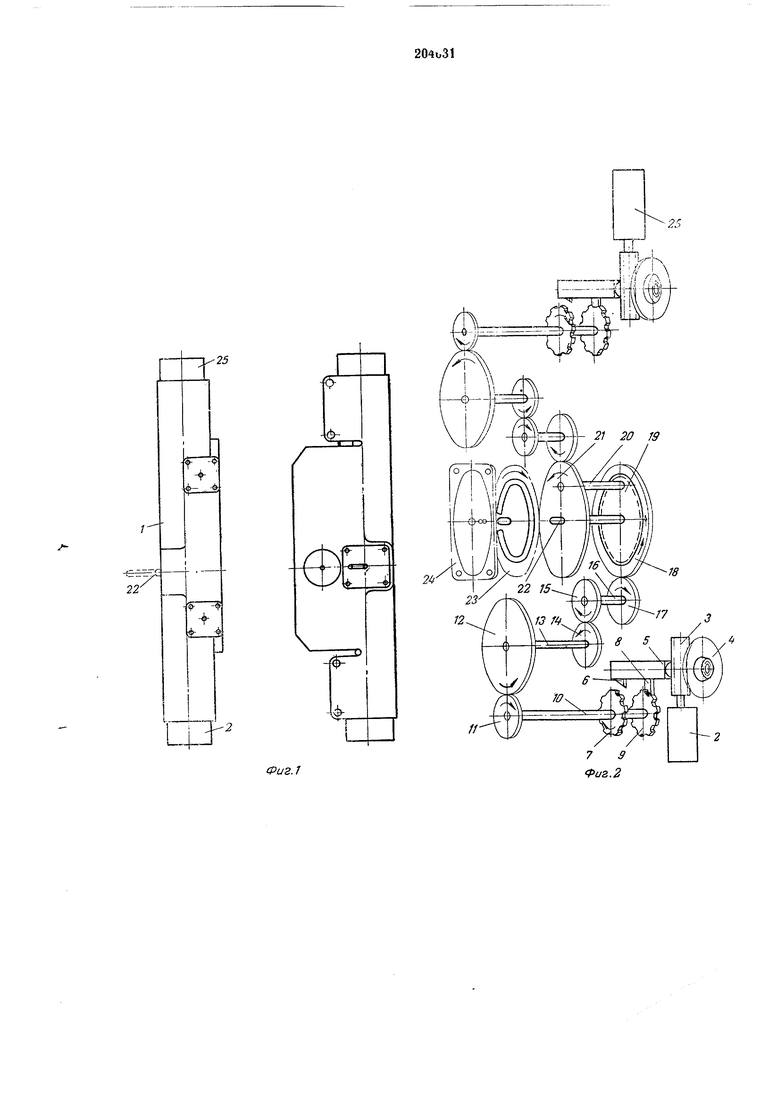
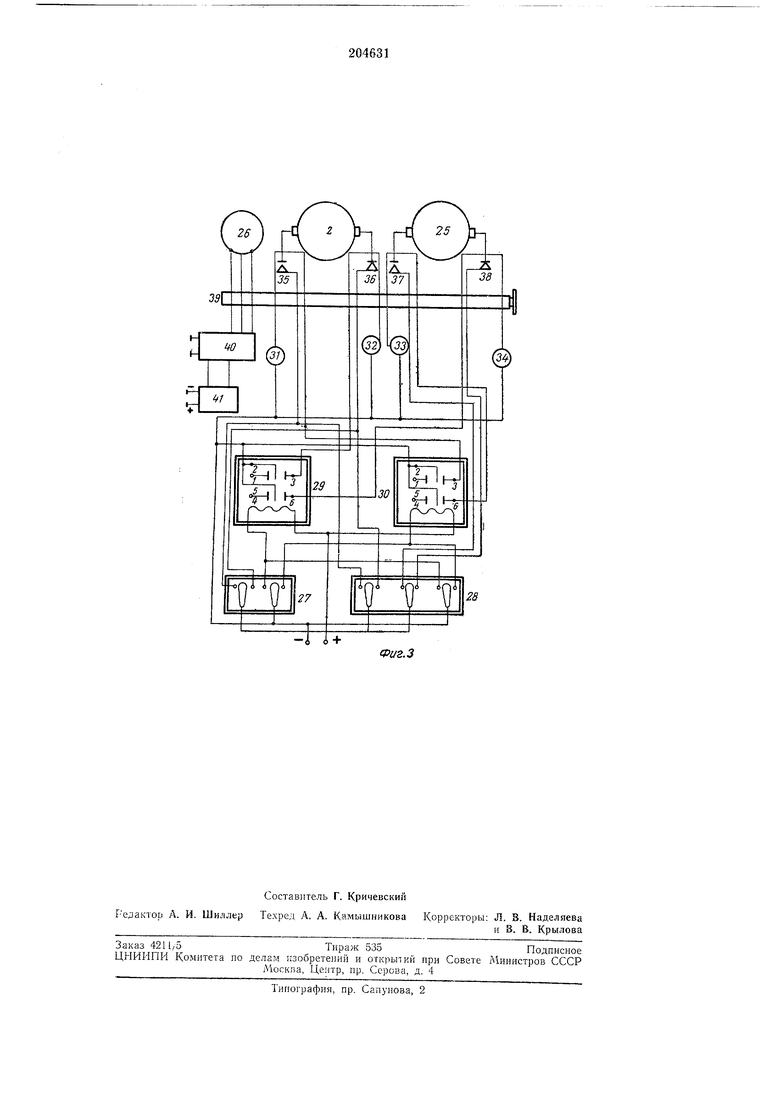
На фиг. I показано нредлагаемое устройство; на фиг. 2 - кинематическая схема его, на фиг. 3 - схема унравления.
Устройство представляет собой миниатюрный прибор, состояш,ий из корпуса /, в котором установлен электродвигатель 2, соединенный червяком 3 с червячным колесом 4. В резьбовое отверстие червячного колеса ввернут ползун 5, имеюшнй храповик 6, врашаюший храповое колесо 7, и стопорный палец 8, входяш,ий в паз диска 9. Колесо 7 и диск 9 жестко закреплены на валике 10, на котором закреплена еш,е и шестерня 11, сценленная с шестерней 12, установленной на промежуточном валике 13. На валике 13 установлена шестерня 14, сцепленная с шестерней 15 промежуточного валика 16. На валике 16 установлена шестерня 17, сцепленная с шестерней 18 со ступицей 19, имеюш,ей резьбовое сочленение с венцом шестерни, и одно эксцентрично расположенное отверстие, в которое входит водило 20, закрепленное на верхней шестерне 21. Приемник 22 давления насадок соединен с шестерней 23 воздухосъемника резиновой трубкой, а шестерня 21 находится в зацеплении с шестерней 23 воздухосъемника, который состоит из двух дисков: диска шестерни 23 и диска корпуса 24. Со второй стороны корпуса 1 укреплен электродвигатель 25, соединен в такой же последовательности с ней 21. Люфт устраняют установ
вой части ступицы 19 и венца шестерни 18 спиральной нружины. В шестерне 23 и корпусе 24 имеется ряд фрезерованных канавок, отверстий-воздуховодов и припаянных трубок. Преобразователь 26 давления соединен трубочками с верхним диском воздухосъемника.
Схема измерения и дистанционного управления (фиг. 3) состоит из двухполюсного переключателя 27, трехполюсного переключателя 28, двух реле 29 и 30, четырех сигальных лампочек 31, 32, 33 и 34 -л четырех выключателей 35, 36, 37 и 38, токосъемника 39, усилителя 40 и осциллографа 41.
При включении переключателя 27 подается напряжение на катушку реле, включаюн его электродвигатель 2, соединенный с левой частью прибора. Входной валик электродвигателя соединен с хвостовиком червяка 3 редуктора. Ползун 5 винтохранового механизма имеет возвратно-поступательное движение. Закрепленный Па ползуне храповик 6 за каждый прямой ход ползуна поворачивает па определенный угол храповое колесо 7. Стопорный палец останавливает систему передачи стонорным диском 9, жестко связанным с колесом 7 системы передачи движения приемника давления.
В состоянии покоя и обратного хода ползуна система передачи движения застопорена. В конце обратного хода ползуна стопорный палец выводится из шлица стопорного диска. При рабочем ходе ползуна, когда храповик поворачивает храповое колесо, стопорный палец удерживается собачкой. В конце рабочего хода, когда храповик выйдет из зацепления с зубом храпового колеса, стопорный палец, освобожденный выступом ползупа от удерживаюш,ей собачки, войдет во впадину стопорного диска п тем самым зафиксирует положение механизма передачи движения и, следовательно, приемника давления в точно заданном положении.
Вертикальное неремеш,ение приемника 22 давления осуществляется при работе электродвигателя 2. Ступица 19 имеет левую резьбу, па которую навернут венец шестерни 18. При работе электродвигателя 2, вращающего шестерню 18, венец шестерни приемника давле ПИЯ вращается против часовой стрелки. Электродвигатель 25 при этом не работает, механизм передачи движения от электродвигателя к щестерне 21 застопорен и водило 20 не позволяет вращаться ступице 19 с заделанным в ней приемником давления, и ступица 19 с приемником давления перемещается по резьбе вверх.
При работе переключателя 28 работают оба электродвигателя и, следовательно, оба механизма передачи движения. Обе щестерни
приемника давления и водило 20 вращаются в одну сторону против часовой стрелки без вертикальпого перемещения. Для нривода воздухосъемника-распределителя, соединяющего приемник давления с индуктивным преобразователем 26, с шестерней 18 находится в зацеплении щестерня 23.
Воздухосъемник-распределитель выполнен таким образом, что при полном обороте при емника давления контролируется герметич
ность системы.
Давление в пограничном слое, отобранное приемнико.м давления, преобразуется в электрический сигнал, подаваемый через токосъемник на усилитель 40, а затем - на осциллограф 41. При работе устройство обеспечивает заданную точность, например, при полном вертикальном перемещении насадка отклонение от шага не превыщает 0,02 мм, а при полном угловом перемещении приемника давлеПИЯ, равным 360, и шаге 5° отклонение от шага не превышает 16.
Предмет изобретения
Устройство для измерения параметров пограничного слоя аэродинамических профилей, состоящее из корпуса, размещепных в нем насадка с механизмом перемещения, двух редукторов, связывающих механизм перемещеимя насадка с приводом, преобразователя давления в электрический сигнал и воздухосъемника, соединяющего насадок с преобразователем давления, отличающееся тем, что, с целью повышения точности измерения, в корпусе установлены два дистанционно управляемых электродвигателя, обеспечивающих вертикальнос и угловое перемещения насадка и соединяющих электродвигатели с редукторами, винтохраповые и винтостопорные механизмы, регулирующие точность установки насадка.
-25
f
.( -Ф
22
-
Фиг.
//
26
| название | год | авторы | номер документа |
|---|---|---|---|
| Приспособление к прессам для автоматической толчковой подачи листового металла | 1933 |
|
SU32469A1 |
| ПРИВОД ВРАЩАЮЩЕГОСЯ КОНВЕЙЕРА АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 1999 |
|
RU2172457C2 |
| Счетчик числа оборотов вала | 1932 |
|
SU31684A1 |
| Портативное билетопечатающее устройство | 1983 |
|
SU1092540A1 |
| Диапроектор для испытания телевизионных передающих фотоэлектрических приборов | 1985 |
|
SU1327045A1 |
| Микрокоординатник для исследования пограничного слоя | 1972 |
|
SU471521A1 |
| СТАНОК ДЛЯ ШЛИФОВАНИЯ ПРОВОЛОКИ ПРИ ЕЕ ПЕРЕМАТЫВАНИИ С ОДНОГО БУНТА НА ДРУГОЙ | 1939 |
|
SU63489A1 |
| Механизм управления сбрасывающим устройством жаток-сноповязалок | 1960 |
|
SU151141A1 |
| Правильный пресс | 1978 |
|
SU770602A1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С МЕХАНИЗМОМ ПЕРЕКЛЮЧЕНИЯ НАПРАВЛЕНИЯ С РАЗЛИЧНОЙ СКОРОСТЬЮ | 2012 |
|
RU2628048C2 |