1
Изобретение относится к экспериментальной аэродинамике, в частности к устройствам, служащим для перемещения чувствительных элементов при измерениях в пограничном слое.
Известны кoopд п aтники для крепления чувствительных элементов при исследованиях пограничных слоев, содержащие привод (ручной или электрический), шкалу перемещений, ходовые винты, гайки, червячные колеса. Однако эти координатники невозможно разместить .внутри исследуемой модели; кроме того, при использовании этих координатников не обеспечивается установка насадка по углу скоса потока автоматически в процессе измерений.
Цель изобретения - повышение точности установки чувствительного элемента в заданной точке пограничного слоя.
Для этого микрокоординатник снабжен двумя раздельно действующими пневматическими реле, соединенными с помощью двухходового воздушного крана с трассой подачи сжатого газа и с атмосферой, а также с ходовым винтом с помощью храповиков, установленных на шарнирно закрепленных подпружиненных рычагах, причем ходовой винт снабжен фиксатором, имеющим такое же число зубьев, что и храновые колеса.
Для повышения точности установки насадка по углу, скоса потока, т. е. поворота его относительно продольной оси для определения направления потока -в заданных точках пограничного слоя, пневматические реле соединены с помощью храповых механизмов с червячной парой, сочлененной с цанговым зажимом насадка при помощи поводка.
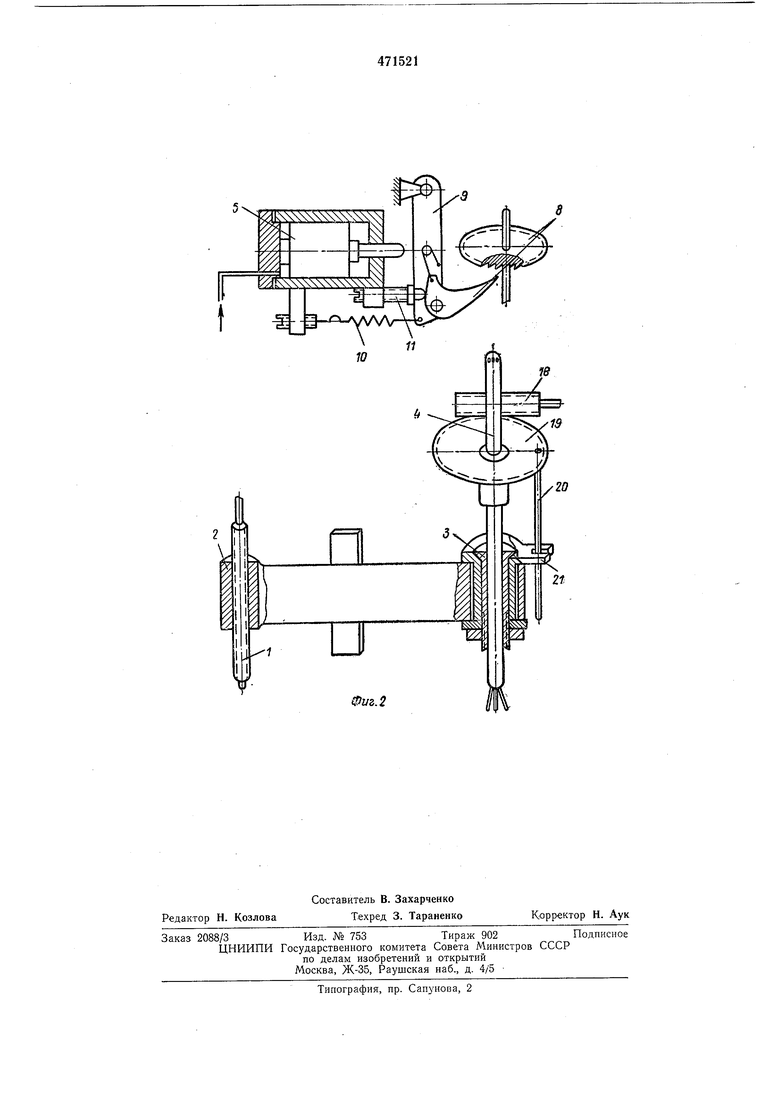
На фиг. 1 и 2 показана схема микрокоординатника.
Микрокоординатник состоит пз двух узлов, обеспечивающих реверсивное поступательное (вдоль оси) и реверсивное вращательное (вокруг оси) перемещения насадка.
Поступательное перемещение насадка производится ходовым винтом 1, по которому движется разрезная гайка 2 с люфтоедом и державкой. В цанге 3 закрепляется насадок 4. Вращение ходового винта 1 осуществляется
с помощью двух малогабаритпых пневматических реле 5 и 6 с двумя самоотключающимися храповыми механизмами 7 и 8.
Одно реле с помощью храпового механизма вращает ходовой винт 1 в одну сторону и
перемещает гайку с насадком вперед, а другое реле с храповым механизмом вращает тот же ходовой винт в обратную сторону и возвращает насадок назад. Реверсивное перемещение насадка обеспечивается отключением одного пневматического реле с храповым
механизмом и включением другого пневматического реле с таким же устройством.
Для того, чтобы храповой механизм не тормозил .возвратное враш.ение ходового винта, собачка, укрепленная на рычаге 9, после каждого импульса пружиной 10 прижимается к упору И, поворачивается, выходит из зацепления и освобождает храповой механизм. Ходовой винт при освобожденном зацеплении удерживается от проворачивания фиксирующим устройством, которое состоит из зубчатого колеса 12, выполненного в виде звездочки, укрепленного на одной оси с храповыми колесами, имеющего такое же количество зубьев, и натяжного ролика 13, скользящего по зубьям этого колеса.
Ролик укреплен на конце рычага 14, который натягивается пружиной 15, и после каждого импульса ролик попадает во впадину между зубьями и фиксирует положение ходового винта.
В зависимости от того, какое реле работает, получается прямой или обратный ход насадка. Пневматическое реле состоит из цилиндра, внутри которого помещен свободно плавающий поршень, который приводится в движение давлением воздуха в 3-4 атм, подаваемого в цилиндр. Поршень толкает рычаг с собачкой, поворачивая храповое колесо на 1 зуб. Таким образом, при каждом импульсе
I и ходовой винт поворачивается на -- оборота
(Z - число зубьев в храповом колесе). Если Я - шаг ходового винта в мм, то насадок после каждого импульса перемещается на h/Z мм. В микрокоординатнике Z 25 зубьев и шаг винта h 0,5 мм, следовательно, насадок после канедого импульса перемещается на 0,02 мм с точнотью до 2 мкм.
Вращательное движение насадка обеспечивается механизмом, аналогичным механизму, разработанному для поступательного движения, но храповые механизмы с помощью пневматических реле 16 и 17 приводят во вращение червяк 18 с червячным колесом 19. При повороте червячное колесо, которое вращается соосно с насадком, через поводок 20 поворачивает втулку 21 с насадком, зажатым в цанге 3.
При каждом имнульсе храповой механизм
360 поворачивает насадок на угол а ,
Zi -Za
где Zi - число зубьев на храповом колесе, Za - число зубьев на червячном колесе.
Все управление микрокоординатником и измерительная аппаратура установлены на пульте.
Для регистрации величины перемещения насадка на пульте установлены два цифровых механических счетчика, указывающих первый 22 - продольное и второй 23 - угловое перемещения насадка. Счетчики приводятся в движение дублирующими пневматическими устройствами, включенными параллельно с каждым пневматическим реле микрокоординатника.
Включение пневматических реле производится от воздушного двухходового крана 24, который поворачивается от руки или приводится во вращение через передачу от электродвигателя 25.
При вращении крана за каждый оборот будет поступать на реле один импульс. Следовательно, при каждом обороте крана давление вначале будет подаваться в цилиндр, а затем, соединяясь с атмосферой, - стравливаться. При работе дозирующего механизма, предназначенного для изменения шага перемещения насадка, электродвигатель дозирующего механизма включается кнопкой 26 и останавливается автоматически в зависимости от установки переключателя 27 или от кулачка 28,
выключающего электродвигатель через 5 импульсов, или же от кулачка 29, выключающего двигатель через 25 импульсов, что соответствует шагу линейного перемещения 0,1 мм и 0,5 мм, а углового - 1° и 5°.
Подключение реле осуществляется кранами 30 и 31.
В малогабаритных устройствах пневматические реле с самоотключающимися храповыми устройствами имеют перед другими приводами то преимущество, что позволяют получить при малом диаметре поршня значительную силу, необходимую для перемещения насадка, за счет увеличения воздушного давления без увеличения размеров поршней, поэтому поршни могут быть малыми и соответственно микрокоординатник также малым, легко монтируясь в малогабаритных моделях или находясь над их поверхностью, не искажая структуры пограничного слоя.
Раздельное действие пневматических реле при перемещении насадка исключает взаимное влияние их одного на другое. Кроме того, наличие одной винтовой пары и одной червячной пары с люфтоедами позволяет с больщой
точностью (до 2 мкм) перемещать насадок в пограничном слое.
Предмет изобретения
1. Микрокоординатник для исследования
пограничного слоя, содержащий ходовой винт, пневматическое реле, трассу для подачи сжатого газа, храповые механизмы и цанговый зажим для закрепления чувствительного элемента, отличающийся тем, что, с целью
повышения точности установки чувствительного элемента в заданной точке пограничного слоя, он снабжен двумя раздельно действующими пневматическими реле, соединенными с помощью двухходового крана с трассой подачи сжатого газа и с атмосферой, а также с ходовым винтом с помощью храповиков, установленных на щарнирно закрепленных подпружиненных рычагах, причем ходовой винт снабжен фиксатором, имеющим такое же число зубьев, что и храповые колеса.
2. Микрокоординатник по п. 1, отличающийся тем, что, с целью повышения точности установки насадка по углу скоса потока, т. е. поворота его относительно продольной оси для определения направления потока в 5
заданных точках пограничного слоя, пневматические реле соединены с помощью храповых механизмов с червячной парой, сочлененной с цанговым зажимом чувствительного элемента при помощи поводка.

От Воздушной mfracenf Риг 1
u
/
