1
Изобретение относится к области прессостроения, в частности к области систем управления npeccai«i специального назначения, предназна- j чанными для прешки методом изгиба крупногабаритных детгшей простой Я сложной форм - типа сребренных панелей, силовых рам, балок и т.д., применяющихся в самолетостроении, ю судостроении и ;фугих отраслях промьшшенности.
Известен правильный пресс, в котором предусмотрен механизм иэкюрения прогиба, связанный с системой jj управления правильным прессом, содержащий силовой гидроцилиндр с поршнем, связанньм с ползуном, верхнее и нижнее гибочные устройства, выполненные в виде поворотных под- 20 пружиненных гибочных рычагов, шарнирно соединенных с ползушками встроенными в план-шайбы ползуна и нижнего стола пресса, и механизм измерения деформации и пружинения, jj контактирующий с ползушками черюз путевые выключатели и выполненный в виде циферблата через путевые выключатели и выполненный в виде циферблата со шкалой и центрального ,
валика, на котором закреплен указатель величины прогиба и указатель, задающий требуемый прогиб 1. Эта система управления является наиболее близкой к изобретению по технической сущности и достигаемому результату,
Однако в процессе эксплуатации пресса были выявлены следующие основные недостатки в системе его упрёшления, которые не позволяют достаточно эффективно использовать его в производственных условиях,
Система управления прессом такова, что изгиб изделия на заданный прогиб в том или ином сечении с одновременным снятием цружинения или npcLBKa изделия по плоскости с одновременным снятием пружинения, начиная со второго хода ползуна вниз, может производиться только на половину величины допуска от размера прогиба, так как система управления прессом автоматически нэ учитывает величины последующих ходов ползуна пресса в зависимости от величины пружинения и во избежание перегиба изделия, последующие величины хода ползуна пресса производятся на половине величины допуска от размера
заданного прогиба, т.е. на малую величину порядка 0,5 мм.
Следовательно, чтобы произвести изгиб изделия в заданном сечении на требуемый размер с одновременньгм снятием пружинения или произвести .правку изделия по плоскости с одновременным снятием пружинения, необ ходимо совершить 10-12 и более ходов ползуна вниз, что снижает производительность гибки или правки, а также .ее точность.
Система управления прессом не фиксирует положение базовой нулевой плоскости, от которой ведется отсчет величины прогиба в каждом сечении изделия.
На прессе отсутствует устройство, позволяющее определить направление кривизны в заданном сечении изделия до начала пресса правки по плоскости Целью данного изобретения является повышение производительности и .точности гибки и правки путем сокращения числа ходов ползуна с одновременньом снятием пружинения, фиксации положения базовой нулевой плоскости., а также автоматизации определения направления начальной кривизны на панели до начала процесса правки по плоскости.
Поставленная цель достигается тем, что механизм измерения деформации и пружинения жестко связан с ползуном и снабжен указателем величины требуемого прогиба с учетом пружинения, выполненным в виде установленной на центральном валике с возможностью вращения шестерней с указателем и бесконтактным датчиком смонтированным на центральном валике с возможностью перемещения вдоль оси диском, кинематическим связанным с шестерней указателя величины требуемого прогиба с учетом пружинения и взаимодействуюцдам с указателем величины прогиба; установленной на центральном валике шестерней с фрикционной муфтой и находящейся в зацеплении с ней. рейкой, а также тросом, намотанным на барабан, ось которого закреплена на корпусе гидроцилиндра, причем один конец троса связан с рейкой, а к другому концу прикреплен груз; нижнее гибочное устройство снабжено датчиком фиксации положения базовой нулевой плоскости, выполненным в виде корпуса, В котором размещен .вертикальный подпружиненный стержень, взаимо действующий через реечно-зубчатую передачу с сельсинами-датчиками, электрически связанными с сельсиномприемником, установленным соосно с. центральным валиком, а устройство задающее .требуемый прогиб, выполнен в виде установленной на центральном валике червячной шестерни с приводом от отдельного электродвигателя.
к которой прикреплен указатель с бесконтактным датчиком, при этом на указателе величины прогиба смонтирован экран, одной кромкой взаимодействующий с бесконтактным датчиком устройства, задающего прогиб, а другой кромкой - с датчиком указателя величины требуемого прогиба с учетом пружинения.
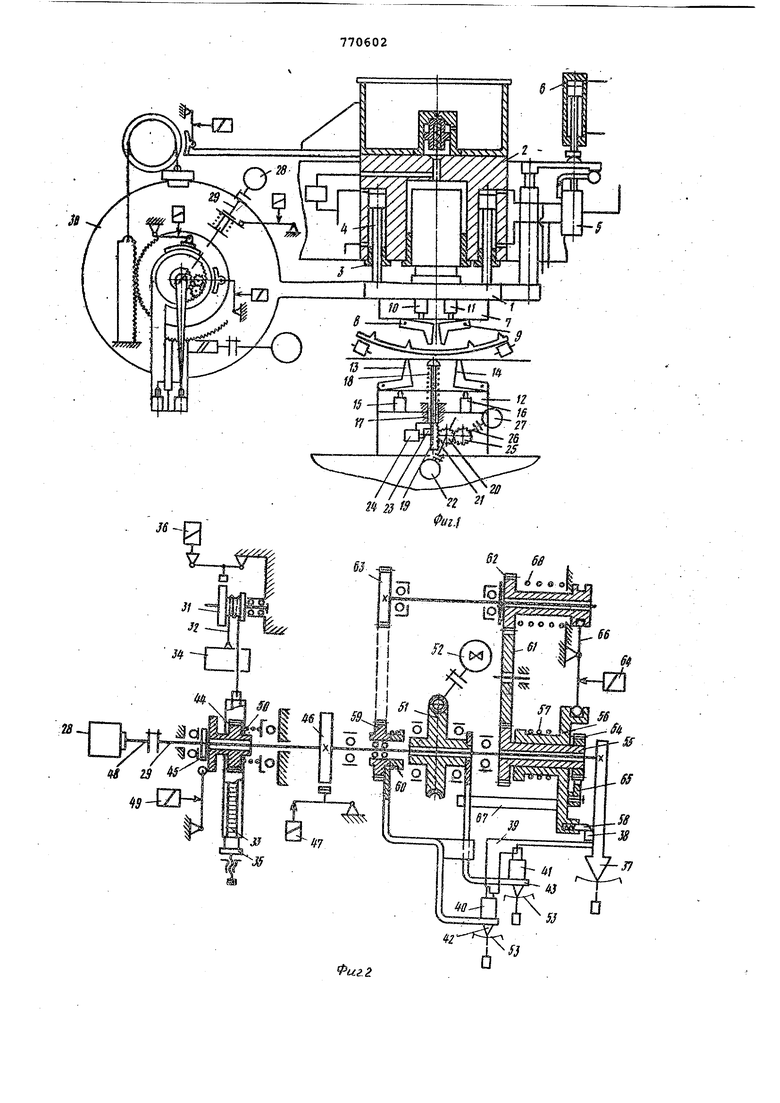
На фиг. 1 представлена схема
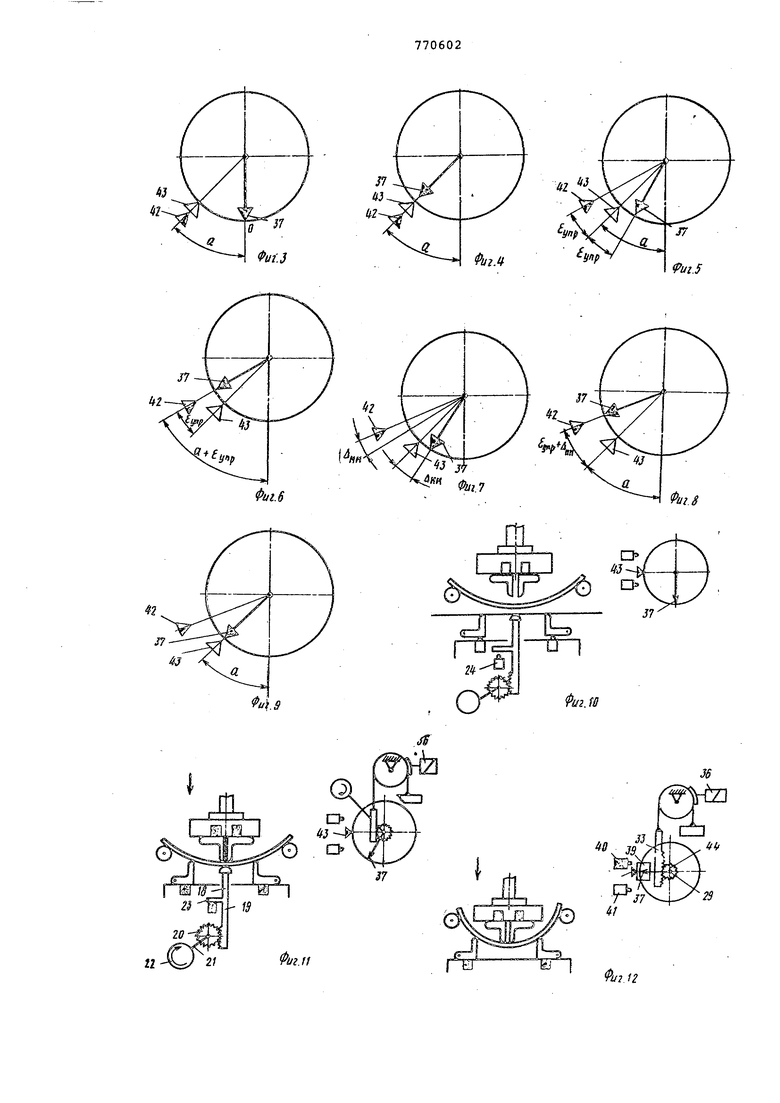
системы управления- правильным прессом; на фиг, 2 кинематическая схема механизма измерения деформации и пружинения; на фиг, 3 - 9 схема гибки в наладочном режиме на заданный прогиб; на фиг, 10-16
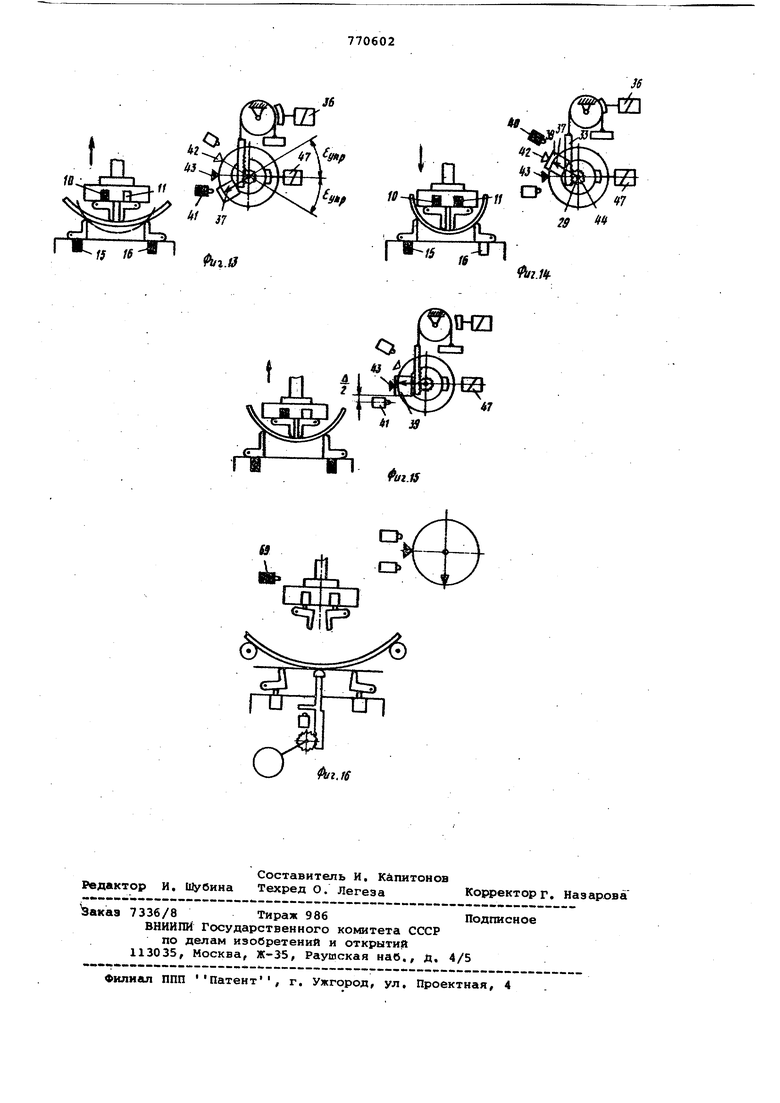
схема гибки в автоматическом режиме на заданный прогиб от нулевой плоскости при начальном положении кривизны сечения, направленной вниз. Система управления правильным
прессом (фиг. 1) состоит из ползуна 1, перемещаемого вниз с помощью скрепленного с ним силового гидроцилиндра 2 плунжерного типа. Обратный ход ползуна вверх совершается с помощью гидроцилиндров возврата 3,.штоки 4 которых прикреплены к ползуну 1. Перемещение ползуна 1 вверх и вниз,, а также останов его в промежуточном положении осуществляются с помощью
следящего золотника 5 и гидродилиндра управления б.
Снизу к ползуну прикреплена планшайба 7, несущая на себе два верхних поворотных подпружиненных гибочных рычага 8 и 9,
а под их опорами смонтированы соответственно путевые выключатели 10 и 11.
Внизу на столе пресса смонтирэвана планшайба 12, несущая на себе
два нижних поворотных подпружиненных гибочных рычага 13И 14, а под их опорами находятся соответственно путевые выключатели 15 и 16. Внизу по оси планшайбы 12, между
раздвинутыми поворотными подпружинeнны И гибочньи/ и рычагами 13 и 14, смонтирован датчик, фиксирующий положение базовой нулевой плоскости изделия, подлежащего либо ги-бке в
заданном сечении,, либо правке.
Указанный датчик фиксации положения базовой нулевой плоскости состоит из корпуса 17, вертикально расположенного подпружиненного
стержня 18, взаимодействующего с рейкой 19, в зацеплении с которой находится шестерня 20, вращающая ротор 21 сельсина-датчика 22.
На другом конце ротора 21 сельсина-датчика 22 закреплен флажок 23, входящий в паз бе.сконтактного .выключателя 24, закрепленного на корпусе 17,
Одновременно с шестерней 20 находится в зацеплении шестерня 25, установленная на оси ротора 26 сельсина-датчика 27, применяемого при правке изделий на автоматическ режиме, Оба сельсина-датчика 22 и 27 электрически связаны с сельсиномприемником 2ВI смонтированным соос с центральным валиком 29 механизма 30 измерения деформации и пружинен который закреплен на ползуне 1 и следовательно, перемещается вместе с ползуном вниз и вверх. Механизм 30 измерения деформации и пружинения, рдзвернутая кинематическая схема которсго предст лена на фиг, 2 состоит из барабана 31, закрепленного на корпу е силового гидроцилиндра 2, и перекинуто через барабан троса 32, один конец которого прикреплен к рейке 33, к второму концу троса прикреплен гру 34, создающий натяжение в тросе. В исходном состоании рейка 33 всегда опирается на регулируемый упор 35. Стопорение барабана 31 от вращения вокруг своей оси вроизводится электромагййчгом 36. В механизм измерения деформации и пруживения входит также центральный валик 29, на оси которого закре лен флажок Эв с указателем 37 величины прогиба, на еаюка S8 смсгатиро экран 39, боковые грани которого взаимодействуют е двумя бесконтактными датчикалш 40 и 41, датчик 40 смонтирован на указателе 42 величины требуеьюго прогиба с учетом пружинения, а датчик 41 смонтирован на указателе 43, задающем требуемый прогиб. Шестерня 44, смоатииовавная на оси центрального валика 29, находится в зацеплении о рейкой 33 и обкатывается по аей ходе ползуна 1 вниз и включенном электромагните 36. Шестерня 44 передает поворот по часовой стрелке как центральному валику 29 через фрикционную муфту 45, так и неподвижно закрепленно му на валике 29 указателю 37 величи кш прогиба. На валике 29 закреплен неподвижн диск 46. Стопорение диска 46 от вращения вокруг своей оси производится электромагнитом 47 при ходе ползуна 1 вверх. Поэтому шестерня 44 также не вращается и не обкатывается по рейке 33, находящейся с ней в зацеплении, а может перемещаться вверх вместе с ползуном I,.вызывая переме щение вверх рейки 33, Соосно с центральным валиком 29 смонтирован сельсин-приемник 28, ротор 48 которого вращается от сигнала, полученного от .сельсинов-дат«и-ieoB, смонтированных на корпусе 17 датчика фиксации положения базовой нулевой плоскости. С помощью электромагнита 49 шестерня 44 сдвигается по валику 29, фрикционное соединение ее с фрикционной муфтой 45 разорвано, и вращение ротора 48 сельсина-приемника 28 с помощью фрикционной муфты 45 передается непосредственно на центральный валик 29 и на указатель 37. При включенном электромагните 49 пружина 50 прижимает шестерню 44 к фрикционной муфте 45. На центральном валике 29 смонтирована червячная шестерня 51 с прикрепленным к ней указателем 43, задающим требуемый прогиб. С помощью электродвигателя 52 черйячная шестерня 51 поворачивает прикрепленный к ней указатель 43, задающий требуемый прогиб на нужную величину. Настройку указателя 43 на нужную величину прогиба производит визуально по шкале циферблата 53 при работе системы на наладочном режиме. На оси центрального валика 29 смонтирован храповик 54, который установлен неподвижно на шестерне 55,которая, в свою очередь, размещена непосредственно на центральном валике 29. На эту же шестерню 55 установлен диск 56 с возможностью вращения относительно нее, Под действием усилия натяжения троса 57, создаваемого пружиной (на чертеже не показана), диск 56 стремится повернуться по часовой стрелке и через подпружиненный фиксатор 58, закрепленный на диске 56,прижимается к флажку 38, на котором закреплен указатель 37 величины прогиба. На центральном валике 29 установлена на подшипниках качения шестерня 59 с неподвижно закрепленным на ней указателем 42 величины требуемого прогиба с учетом пружинения. Под действием усилия натяжения троса 60, создаваемого пружиной (на чертеже не показана), шестерня 59 стремится повернуться против часовой стрелка и поэтому прикрепленный к ней указатель 42 упирается в указатель 43, и их стрелки в исходном . положении стоят на нуле шкалы циферблата 53. Шестерня 55 находится в зацеплении с шестерней 59 через зацепление шее- , терен 61, 62, 63, причем шестерня 62 соединяется с шестерней 63 фрикионно, а шестерня 63 зацепляется епосредственно с шестерней 59. При включенном электромагните 36 и выключенном электромагните 64, то соответствует положению, когда олзун 1 движется вверх вместе с 1еханизмом 30 измерения деформации и пружинения, шестерня 44, обкатывая неподвижно зависшую рейку 33, поворачивает против часовой стрелки указатель 37 и флажок 38, который, йоздействуя на подпружиненный фиксатор 58, закрепленный в диске 56, заставляет его поворачиваться также против часовой стрелки, а установленные на диске собачки 65 вызывают поворот храповика 54, который будучи закреплен неподвижио на шестерне 55 вызывает поворот шестерен 55,61, 62,63, 59, В результате шестерня 59 с закрепленным на ней указателем 42 поворачивается в противоположном направлении, т.е. по часовой стрелке. При выключенных электромагнитах 36 и 47 и включенном электромагните 64 с помощью рычага 66 отводится диск 56 с собачками 65, Одновременно отводится шестерня 62 от шестерн 63,и указателд) 42 возвращается к указателю 43 после совершения неско ких прогибов. В этот же MONseHT при тех же положениях электромагнитов рейка 33 под действием собственного веса опускается до регулируемого упора 35, и указатель 37, повора чиваясь против часовой стрелки, занимает нулевое положение по шкале циферблата 53, Одновременно при включенном элек тромагните 64 отведенный диск 56 с собачками 55, поворачиваясь по часовой стрелке, возвратится в перЕО начальное положение усилием натяже иия троса 57, создаваемого пружиной (на чертеже не показана). Диск 56 занимает первоначальное положение в момент, когда упор 67, закрепленный в диске, упрется в указатель 43, При выключении электромагнита 64 с помощью реле времени через 0, 1.,0 с с момента его включения, шес терня 62 под влиянием усилия пружи ны 68 перемешается по оси до сЬпри косновения с шестерней 63, т,е, снова восстанавливается фрикционно соединение шестерен 62 и 63, Система управления работает еле дующим образом. При работе систее и в наладочном режиме по cxeNiB гибки на заданный прогиб ползун 1 с механизмом 30 измерения деформации и пружинения и верхним гибочным устройством находится в крайнем верхнем положени На нижние гибочные рычаги 13 и 14 устанавливают изделие на данном участке гиба, включают электро двигатель 52 и с помощью червячной шестерни 51 поворачивают-прикрепле ный к ней указатель 43, задающий требуемый прогиб, на нужную величи ну. Настройку указателя 43 на требуемую величину прогиба на данном частка гиба производят визуально по шкале циферблата 53, При нключекии электродвигателя 52, включается электромагнит 64 толкающего типа, который нажимает на рычаг 66. Последний, поворачиваясь, отводит иск 56 с собачками 65 и смонтированным на нем подпружиненным фиксатором 58 так, что фиксатор 58 убирается под флажок 38. Под действием усилия натяжения троса 57 с помощью (на фиг, 2 условно не показана);, диск 56 поворачивает ся по часовой стрелке до тех пор пока упор 67f закрепленный на. диске/ не упрется в указатель 43, задающий требуегинй прогиб. Одновременно рычаг 66f поворачиваясь, сдвигает аестернш 62 относительно шестерни 63,разрывая Фрикцноккое соединение, что дает з з « й яость под действием усилия натяжения троса 60 с помощью пружины {ка фиг,2 условно не показана) поворачивать указатель 42, прикрепленный к шестерне 59, против часовой стрелки до тех пор, пока указатель 42 не упрется в указатель 43, В таком положении стрелка указателя 42 совпадает со стрелкой, указателя 43, т,е, оба указателя показывают ка шкале икферблата 53 требуек ую величину прогиба а на заданном участке гиба (ск.фиГсЗ) После того, ка упор 67, закрепленный на диска- 56,упирается в указатель 43, а указатель 42 совпадает с указателем 43, срабатывает реле времени, которое выключает электромагнит 64,Пол действием усилия пружины (на фиг,2 не показана) якорь электромагнита 64 возвращается в исходное положение, а рычаг 66 возвращается в первоначшзьное положение Шестерня 62 под действием усилия пружины 63 вновь смыкается с шестерней 63, образуя фрикционное соединение. При ходе ползуна вниз рейка 33, опираясь ка регулируе чый упор 35, вместе с механизмом 30 движется вниз, вызывая вращение барабана 31 и перекатывание по нему троса 32 с грузом 34, который при этом поднимается вверх. От соприкосновения верхних и нижних поворотных подпружиненных гибочных рычагов 8, 9, 13и 14 с изгибаемым изделием замыкаиотся электрические контакты путевых выключателей 10, 11, 15 и 16, после чего включается электромагнит 36, В результате барабан 31 оказывается заторможенным, т.е, он не может больше вращаться.
С этого момента при дальнейшем ходе ползуна 1 вниз вместе с механизмом 30 начинает обкатываться шестерня 44 по часовой стрелке относительно оказавшейся неподвижной рейки 33.
Шестерня 44 через фракционное соединение ее с фрикционной муфтой 45 поворачивает по часовой стрелке центральный валик 29 и неподвижно установленные на нем диск 46 и указатель 37.
Одновременно вхолостую поворачивается ipoTOp 48 сельсина- приемника 28, так как последний электрически выключен. Окончание хода ползуна вниз определяется визуально при совпадении указателя 37 с указателем 43 (см. фиг. 4).
При ходе ползуна вверх, в начале его движения, когда включены контакты путевых выключателей 10, 11, 15 и 16 верхних и нижних поворотных подпружиненных гибочных рычагов 8, 9, 13 и 14, а также когда включен электромагнит 36, шестерня 44 обкатывается по неподвижно рейке 33 против часовой стрелки и указатель 37 также поворачивается против часовой стрелки.
Так как одновременно с поворотом указателя 37 поворачивается и флажок 38 против часовой стрелки, то последний, нажимай на выдвинувшийся из диска 56 фиксатор 58, заставляет поворачиваться против часовой стрелки диск 56 с собачками 65. Последние, находясь в зацеплении с храповиком 54, заставляют его поворачиваться также против часовой стрелки Так как храповик 54 соединен с шестерней 55 неподвижно, то эта шестерня также поворачивается против часовой стрелки, но находясь в зацеплении с шестернями 61, 62, 63, 59, вызывает поворот шестерни 59 вмсте с закрепленным на ней указателем 42 по часовой стрелке.
Таким образом, при ходе ползуна 1 вверх и включенном электромагните 36, указатель 37 поворачивается против часовой стрелки, а указатель 42 поворачивается по часовой стрелке. В процессе дальнейшего хода ползуна 1 вверх, при размыкании одного из контактов путевых выключателей 10, 11, 15 и 16 верхних и нижних поворотных подпружиненных гибочных рычагов 8, 9, 13 и 14 (что соответствует окончанию упругой деформации сечения изделия после гибки), выключается электромагнит 36 и включается электромагнит 47. В этот момент времени указатель 37 повернулся от указателя 43 в направлении против часовой стрелки на величину упругой деформации , а указатель 42 повернулся от указателя 43 по направлению часовой стрелки также на величину упругой деформации . (см. фиг. 5)
С момента включения электромагнита 47 прекращается поворот диска 46, центрального валика 29 и закрепленных на нем флажка 38 с указателем 37 величины прогиба.
Таким образом, остановкой поворота указателя 37 фиксируется величина упругой деформации сечения изделия
0 после гибки. С этого при дальнейшем ходе вверх ползуна 1 вместе с механизмом 30 шестерня 44 уже не обкатывается по рейке 33, а перемещается вверх вместе с рейкой
15 33, вызывая перемещение груза 34 вниз и поворот барабана 31 от действия веса груза 34 через гибкий трос 32.
Далее ползун 1 совершает рабочий
0 ход вниз, т.е. производит гибку сечения изделия. Так как при этом замыкаются контакты путевых выключателей 10, 11, 15 и 16 верхних и нижних поворотных подпружиненных ги5бочных рычагов 8, 9, 13 и 14, то включается электромагнит 36, который стопорит барабан 31, и выключается электромагнит 47. При рабочем ходе ползуна 1 вниз шестерня 44 снова обкатывается по неподвижной рейке 33
0 в направлении по часовой стрелке, и указатель 37 поворачивается также jno часовой стрелке.
Одновременно вхолостую поворачивается ротор 48 сельсина-приемника
5 28. Ход ползуна вниз, т.е. гибка сечения изделия прекращается, когда указатель 37 совпадает с указателем 42. Под действием натяжения троса 57, диск 56 поворачивается по часовой
0 стрелке до положения, при котором упор 67, закрепленный в диске 56 упирается в указатель 43,
Таким образом, указатель 37 повернулся по шкале циферблата 53 на
5 величину , (мм) от своего предыдущего положения (точки окончания упругой деформации), как показано на фиг. 6 .
. После окончания рабочего хода
0 вниз ползун, начинает перемещение вверх и в начале этого движения взаимодействие элементов автоматики происходит аналогично -описанному выше, а шестерня 44 обкатывается по неподвижной рейке 33 и поворачивает5ся при этом-против часовой стрелки.
В этом же направлении поворачивается и указатель 37,так как его ведет через центральный валик
0 29 шестерня 44. При дальнейшем ходе ползуна 1 вверх, при размыкании одного из контактой путевых выключателей 10, 11, 15 и 16 верхних и нижних поворотных подпружиненных
5 гибочных рычагов 8, 9, 13 и 14 (что свидетельствует об окончании упругой деформации сечения изделия после гибки), выключается электромагнит 36 и включается электромагни 47. В этот . момент указатель 37, пово рачиваясь против часовой стрелки, не совпадает с указателем 43, а поворачивается дальше от него на неко торую величину упругой деформации Ь мм, Одновременно указатель 42, поворачиваясь по часовой стрелке, поворачивается от предыдущего положения вверх по шкале циферблата 53 на такую же величину упругой деформации Л мм. С момента включения электромагни та 47 прекращается поворот диска 46 центрального валика 29 и закрепленных на нем флажка 38 вместе с указателем 37. Таким образом, остановкой поворо та указателя 37 фиксируется величина упругой деформации сечения издел после гибки (см. фиг. 7), С этого момента при дальнейшем ходе вверх ползуна 1 вместе с механизмом 30 шестерня 44 уже не обкатывается по рейке 33, а перемещается вверх вместе с рейкой. 33, вызывая перемещение груза 34 поворот барабана 31 от действия веса груза 34 через гибкий трос 32. Поскольку при ходе ползуна 1 вве и включенном электромагните 36 указатель 37 величины прогиба не совпал с указателем 43 на некоторую величину упругой деформации Д мм, то необходимо еще дополнительно прогнуть сечение изделия на величин упр. + 2л,) мм (см, фиг. 7) , считая от крайнего положения указателя 37 ранее переместившегося на величину Л мм. Далее ползун 1 совершает рабочий ход вниз. Взаимодействие элементов автома тики при рабочем ходе ползуна вниз происходит аналогично описанному вы ше. Ползун 1 совершает рабочий ход вниз и дополнительно еще глубже из.губает сечение издел1ия по шкале циферблата 53 на величину (. 2Д мм, т.е. указатель 37, поворачивая по часовой стрелке, должен совпаст на шкале циферблата 53 с новым положением указателя 42, ранее переместившегося на величину Д мм, Ход ползуна вниз, т.е. дополнительная гибка сечения изделия прек щается, когда указатель 37 совпада с указателем 42 (см. фиг. 8). После окончания рабочего хода вниз ползун начинает перемещение взэерх, и в начале его движения вве вйаимодействие элементов автоматики происходит аналогично описанному выше, а шестерня 44 обкатывается по неподвижной рейка 33 в направлении против часовой стрелки, и в том же направлении поворачивается указатель 37, так как его ведет реечная естерня 44 через центральный валик 29. Поворачиваясь от указателя 42 к указателю 43, указатель 37 приближается к указателю 43, На этом участке указатель 42 не будет поворачиваться, т.е. будет стоять на месте. Если указатель 37, поворачиваясь, переходит указатель 43, то указатель 42 поворачивается на ту же величину, что и указатель 37 от указателя 43, При дальнейшем ходе ползука 1 вверх, при размыкании одного из контактов путевых выключателей 10, 11, 15 и 16 верхних и нижних поворотных подпружиненных гибочных рычагов 8,9, 13 и 14 (что свидетельствует об окончании упругой деформации), выключается электромагнит 36 и включается электромагнит 47. С этого момента указатель 37 болыие не поворачивается, так как застопорены диск 46, дентральный валик 29 и закрепленйый на нем флажок 38 .с указателам 37, Поэтому, если указатель 37 в момент останова совмещается с указателем 43, это свидетельствует о том, что прогиб в сечении изделия соответствует заданному (см. фиг. 9). С момента останова поворота указателя 37 при дальнейшем ходе вверх ползуна 1 с механизмом 30 шестерня 44 уже не обкатывается по рейке 33, а перемещается вверх вместе с рейкой 33 и ползуном 1f вызьшая перемещение груза 34 вниз и поворот барабана 31 от действия веса груза 34 через гибкий трос 32. По пути перемещения вверх ползуна 1 срабатывает путевой выключатель 69, предусмотренный в принципиальной электрической схеме систегФ: управления правильным прессом, и ползун 1 выставляется в крайнее верхнее положение. При этом выключаются электромагниты 47 и 36, включается электродвигатель 52, в результате чего указатель 43 поворачивается против часовой стрелки до совпадения с нулем шкалы циферблата 53. Одновременно включается электромагнит 64, и реле времени через 0,5-1,0 с выключает его. При выключении электромагнита 36 рейка 33 под собственным весом опускается до регулируемого упора 35, и указатель 37 встает в нулевое положение по шкале циферблата 53. При срабатывании электромагнита 64 через рычаг 66 отводится диск
56 с собачками 65, В результате фиксатор 58, смонтированный на дис 56, убирается вместе с ним под флажок 38. Храповик 54 и шестерня 55 остаются на месте.
Одновременно отводится шестерня 62 для того, чтобы указатель 42 вернулся после нескольких прогибов к указателю 43 и уперся в него, т. оба этих указателя окажутся в нулевом положении по шкале циферблата 53,
Возврат 42 до упора в указатель 43 обеспечивает натянутый трос 60 от усилия пружины {на фиг. 2 не показана) „ Натянутый трос 60 поворачивает против часовой стрелки шестерню 59 и прикрепленный к ней указатель 42.
При работе системы управления правильным прессом на автоматическ режиме гибки на. заданный прогиб от нулевой плоскости при начальном положении кривизны сечения, направленной вниз, ползун 1 с механизмом 30, а также с верхним гибочным устройством находится в крайнем верхнем положении (см. фиг, 10).
Указатель 37 нгходится в нулевом положении шкалы циферблата 53, Внизу находится датчик фиксаци положения базовой нулевой плоскост и нижнее гибочное устройство.
При этом сельсин-датчик 27 электрически выключен (см. фиг, 1) а сельсин-датчик 22 электрически включен и соединен с сельсиномприемником 28,
При включении электродвигателя 52 от заданной программы с помощью червячной шестерни 51 поворачивается по шкале циферблата- 53 указатель 43 на требуемую величину прогиба в данном сечении изделия (см. фиг. 10) .
При включении электродвигателя 52 одновременно включается электромагнит 64, в результате чего указатель 42 поворачивается против часовой стрелки до упора в указатель 43, а их стрелки совпадают и показывают на шкале циферблата 53 заданную величину прогиба.
Диск 56 под влиянием усилия натяжения троса 57 поворачивается по часовой стрелке до положения, при котором упор 67, закрепленный в диске 56, упирается в указатель 43 (см, фиг, 2),
С помощью реле времени через 0,5-1,0 с электромагнит 64 вновь выключается. На нижние поворотные подпружиненные гибочные рычаги 13 и 14 устанавливают изделие на данном участке гиба (см, фиг.1), Имеющийся про.гиб от нулевой плоскости в данном сечении изделия выявляет датчик фиксации положения базовой нулевой плоскости, смонтированный по оси планшайбы 12, рычагами 13 и 14 stiHsy на столе.
Датчик работает следующим образом. Под действием веса изделия и усилия на ползуне, при ходе его t вниз от заданной програмли (см. фиг. 1), вертикально расположенный подпружиненный стержень 18 опускается, вызывая перемещение- рейки 19, в зацеплении с которой находится шестерня 20, поворачивающая по часо0вой стрелке ротор 21 сельсина-датчика 22, который электрически синхронно передает угол поворота на сельсин-приемник 28, смонтированный соосно с центральным валиком 29 5 механизма 30 (см, фиг. 2).
На другом конце ротора 21 сельсина-датчика 22 закреплен флажок 23, входящий в паз бесконтактного выключателя 24, закрепленного на корпусе 17. Указанный выключатель 24 с помощью флажка 23 и ротора 21 сельсина-датчика 22 взакьетдействует с вертикальным подпружиненным стержнем 18 при его переь«эщении вниз, и таким образом фиксирует положение ба5зовой нулевой плоскости, от которого ведется отсчет величины прогиба в каждом сечении изделия (см.фиг,1),
Величину начсшьной стрелы про30гиба в сечении изделия от нулевой плоскости учитывает указатель 37 по шкале циферблата 53,
Когда при ходе ползуна вниз замыкаются все чет-ыре контакта путе5вых выключателей 10, 11, 15 и 16, включается электромагнит 49 и шесгерня 44 кинематически выключается, так как фрикционное соединение ее с фр11кционнсй муфтой 45 будет разорвано и ротор 48 сельсина-приемника
0 28 будет синхронно поворачивать центральный валик 29 с указателем 37 от сигнала, получаемого от вращения ротора 21 сельсина-датчика 22, Одновременно с электромагнитом
5 49 включается электромагнит 36, включается бесконтактный выключатель 24, и ползун останавливается. До останова ползуна указатель 37 успевает поверн /ться по часовой стрел0ке от нуля по шкале циферблата 53,и когда ползун останавливается,указатель 37 показы Бает величину начальной стрелы прогиба в сечении изделия от нулевой плоскости датчика
5 (см, фиг. 1.1) , Так как электромагнит 36 был включен, то он застопорил барабан 31, и шестерня 44 обкатывается вхолостую по неподвижно зависшей рейке 33.
С помощью реле времени электро0магнит 49 выключается и полностью выключает электрическое питание сельсина-датчика 22, а также бесконтактного выключателя 24, Электромагнит 36 остается включенным.
5 С этого момента от заданной прог раммы ползун совершает рабочий ход вниз до тех пор, пока указатель 37 не совпадет I с указателем 43 (см, фиг, 12), Так как электромагнит 49 выключился, шестерня 44 возвращается в свое рабочее положение и при дальнейшем ходе ползуна вниз она, обкатываясь по неподвижно зависяяей рейке 33, поворачивает по часовой стрелке центральный валик 29 и неподвижно закрепленный на нем указатель 37 до совпадения с указателем 43. При совпадении указателя 37 с указателем 43 JieBaH кромка экрана 39 проходит середину паза левого бесконтактного.датчика 40. В результате левый бесконтактны датчик 40 выключает ход вниз ползуна и дает команду на ход ползуна вверх. Ползун вместе с механизмом 30 начинает движение вверх. При этом указатель 37 поворачивается против часовой стрелки и пе рейдя за указатель 43 вызывает пов рот ,иа такую же величину указателя 42, но в обратном направлении на неличину упругой деформации . (по часовой стрелке от указателя 43) как показано на фиг, 13, При дальнейшем ходе вверх ползуна, когда размыкается один из контактов путевых выключателей 10 и И, а также 15 и 16, включается электромагнит 47 и выключается электромагнит 36. В результате включения электромагнита 47, указатель 37 прекращае свой поворот против часовой стрелк т.е. он останавливается и фиксируе величину упругой деформации Е,рр, сечении изделия. После включения электромагнита 47 и выключения эле тромагнита 36 правый бесконтактный датчик 41 дает команду на повторны ход ползуна вниз, а реле времени, исполняя эту команду, заставляет ползун двигаться вниз, производя гибку сечения изделия. При замыкании контактов путевых выключателей 10 и 11, а также 15 и 16 включается электромагнит 36 и выключается электромагнит 47, а ук затель 37, поворачивается по часово стрелке до совпадения с указателем 42 (см. фиг. 14). В этом положении левая кромка экрана 39 входит в середину паза л го бесконтактного датчика 40,закре ленного на указателе 42, В результ датчик 40 срабатывает, выключает команду ход ползуна вниз и дает команду ход ползуна вверх При движении ползуна вверх ука затель 37 поворачивается против ча вой стрелки, приближаясь к указателю 43, По мере дальнейшего движения ползуна вверх, когда выключается один з контактов путевых выключателей 10 и 11 или 15 и 16, включается электромагнит 47 и выключается электромагнит 36 (см, фиг, 15). При этом, если указатель 37 совпадает с указателем 43 и правый бесконтактный датчик 41 не включается, то команды на повторный ход вниз ползуна не последует и ползун уходит в крайнее верхнее положение, которое фиксируется срабатыванием путевого выключателя 69 (см,фиг,16), Так как указатель 37 при своем повороте против часовой стрелки совпадает с указателем 43, это свидетельствует о том, что в данном сечении изделия достигнут заданный прогиб от нулевой плоскости, Датчик 41 не включился потому, что праваякромка экрана 39 не делала до середины паза датчика 41 на величину половины допуска § мм от размера прогиба. При срабатывании путевого выключа™ теля 69 выключаются электромагниты 47 и 36, включается злектродвигатель 52 f а. указатель 43 устанавливается на величину послед ющего заданного по програе.€ме прогиба. Одновременно включается электромагнит 64 и через 0,5-1,0 с с помощью реле времени выключается. При выключении электромагнитов 36 и 47, рейка 33 под собственным весом опускается до регулируемого упора 35, и указатель 37, поворачиваясь, встает в нулевое положение по шкале циферблата 53. При включении электромагнита 64 указатель. 42 возвратится к указателю 43 до упора в него, т.е.до нуля по шкале циферблата 53, Система управления правильным прессом позволяет также производить гибку изделий в автоматическом режиме на заданный прогиб от нулевой , плоскости при начальном положении кривизны сечения, направленной вверх, Схема гибки в автоматическом режиме на заданный прогиб от нулевой плоскости при начального положении кривизны сечения направленной вверх, принципиально та же, что и при гибке изделия при начальном положении кривизны сечения, направленной вниз, Отличие заключается в том, что стрела прогиба от нулевой плоскости начальной кривизны сечения,- направленной вверх, не учитывается датчиком фиксации положения базовой нулевой плоскости, а при схеме гибки сечения изделия с начальной кривизной, направленной вниз, учитывается начальная стрела прогиба в сечении изд5лия от нулевой плоскости. Система управления правильным прессом позволяет производить также прав.ху панелей по плоскости в авто матическом режиме, как при начальном положении кривизны сечения на панели, направленной вверх, так и при начальном положении кривизны сечения на панели, направленной вниз, При правке панелей по плоскости в автоматическом режиме, при начальном положении кривизны сечения на панели, направленной вниз, производится перестановка от заданной программы поворотных подпружиненны гибочных рычагов 8,9 и 13, 14, т.е. на верхнем гибочном устройстве гибочные рычаги 8 и 9 разводятся на заданное расстояние, а на нижне гибочном устройстве гибочные рычаги 13 и 14 сводятся. Описанная система управления пр вильным прессом позволит повысить производительность труда при гибке или правке в 2-3 раза, а точность гибки или правки повысится тоже в 2-3 раза. Производительность гибки и правки изделий повысится за счет сокращения числа ходов вниз ползуна с верхним гибочным устройством. Формула изобретения Правильный пресс, содержащий силэвой гидроцилиндр с поршнем, связанный с ползуном,гибочные устройства, выполненные в виде поворотных подпружиненных гибочных рычагов, шарнирно соединенных с ползушкё1ми, встроенными в планшайбы ползуна и нижнего стола пресса, и механизм измерения деформации и пружийения, контактирующий с палзушка ш через п тевые выключатели и выполненный в виде циферблата со шкалой и центрального валика, на котором закреплены указатель величины прогиба и устройство, задающее требуемый прогиб, отличающийся тем, что, с целью повышения производител ности и точности гибки и правки путем сокращения числа ходов ползуна с одновременным снятием пружинения фиксации положения базовой нулевой плоскости, а также автоматизации определения направления начальной кривизны на панели до начала процесса правки по плоскости, механизм измерения деформации и пружинения жестко связан с ползуном и снабжен указателем величины прогиба с учетом пружинения,выполненным в виде установленной на центральном валике с воз1 зжностью вращения шестерни с указателем и бесконтактным датчиком; смонтированным на центрашьном валике с возможностью перемещения вдоль оси диском, кинематически связанным с шестерней указателя величины требуемого прогиба с учетом пружинения и взаилю действующим с указателем величины прогиба; установленной на центральном валике шестерней с фрикционной муфтой и находящейся в зацеплении с ней рейкой, а также тросом, намотанным на барабан, ось которого закреплена на корпусе гидроцилиндра, причем один конец троса связан с рейкой, а к другому концу прикреплен груз; одно из гибочных устройств снабжено датчиком фиксации положения базовой нулевой плоскости, выполненным в виде корпуса, в котором размещен подпружиненный стержень, взаимодействующий через реечно-зубчатую передачу с сельсинами-датчиками, электрически связанными с сельсином-приемником, установленным соосно с центральным валиком, а устройство, задающее требуемый прогиб, выполнено в виде установленной на центральном валике червячной шестерни с приводом от отдельного электродвигателя, к которой прикреплен указатель с бесконтактным датчиком, при этом на указателе величины прогиба смонтирован экран, одной кромкой взаимодействующий с бесконтактным датчиком устройства, задающего прогиб, а другой кромкой - с датчиком указателя величины требуемого прогиба с учетом пружинения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 424632,-кл. В 21 D 1/14, 1974 (прототип). l42St9 l f
«М.
f} 16
I 1
./4t
tHZ
tfZ.tf
«9
ik.

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕСС ДЛЯ ПРАВКИ-ГИБКИ ИЗДЕЛИЙ | 1970 |
|
SU424632A1 |
| Устройство для измерения усилия разрушения образцов | 1981 |
|
SU966509A1 |
| ГИДРОПРИВОД НАЖИМНОГО ОРГАНА СТАНКА ДЛЯ НАКАТКИ ПОВЕРХНОСТИ ДЕТАЛЕЙ | 1969 |
|
SU234083A1 |
| Кабельный кран | 1988 |
|
SU1558855A1 |
| Трубогибочный станок | 1984 |
|
SU1274802A1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| Устройство для многоколенной гибки труб | 1990 |
|
SU1734907A1 |
| Прибор для упражнения в стрельбе по морским целям | 1930 |
|
SU25074A1 |
| АЭРОДРОМНЫЙ ГИДРОАГРЕГАТ ДЛЯ ОБСЛУЖИВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2067953C1 |
| Устройство для вырубки заготовок из полосового и ленточного материала | 1979 |
|
SU871926A1 |
ui
j
Йгг./
Ь
