Настоящее изобретение относится к способам автоматического управления инерционными объектами.
Известен способ автоматического управления инерционным объектом, заключающийся в поддерживании величины рН регенерированного раствора путем дискретного регулирования расхода реагента.
Для оптимизации технологического процесса предлагается зону изменения регулируемого параметра разбивают на четыре предела - рН (второй - верхний), рН (первый - верхний), рН (первый - нижний), рН (второй - нижний) и предусматривают активное воздействие на объект при выходе регулируемого параметра за пределы рН (второй - верхний) и рН (второй - нижний).
На фиг. 1 представлена схема автоматического управления процессом мышьяково-содо-вой сероочистки газов; на фиг. 2 - структурная схема вычислительного устройства для осуществления описываемого способа; на фиг. 3 - элементная схема вычислительного устройства.
Схема, изображенная на фиг. 1, содержит абсорбер 1, регенератор 2, расходомер 3 с диафрагмой 4, регулирующий блок 5, регулируемый орган 6, газоанализатор 7 с датчиком 8, рН-метр 9 с датчиком 10 и вычислительное устройство 11, выполненное на элементах УСЭППА (унифицированная система элементов промышленной пневмоавтоматики).
Коксовый газ направляется в абсорбер 1 и проходит в направлении снизу вверх противотоком к поглотительному мышьяково-содовому раствору. Регенерированный раствор из регенератора 2 подается на орошение абсорбера 1. Сигнал от датчика рН-метра поступает на вычислительное устройство, где сравнивается с заданным пределом значения величины рН. Отработанный сигнал через регулирующий блок, куда поступает сигнал и от расходомера, воздействует на регулируемый орган.
Одновременно сигнал от газоанализатора на выходе газа из абсорбера поступает также на вычислительное устройство для корректировки заданных пределов регулируемого параметра - величины рН.
Общая формула программы управления процессом мышьяково-содовой сероочистки имеет следующий вид: 
Регулируемым параметром является рН (в дальнейшем обозначим X - текущее значение), регулирующим - расход кальцинированной соды (в дальнейшем обозначим U).
где: U - величина регулирующего воздействия;
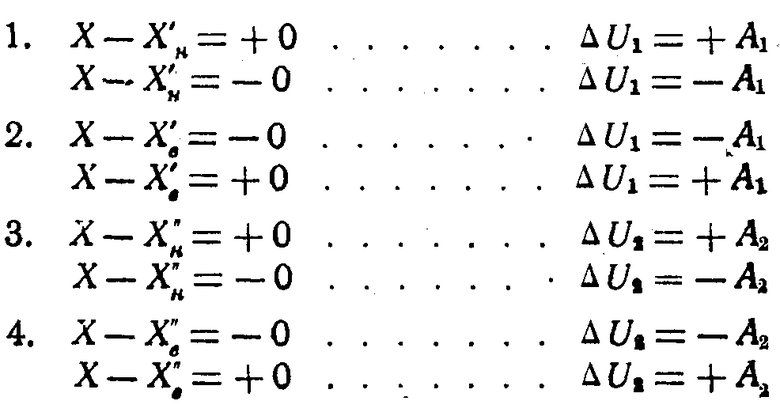
±ΔU1 - величина приращения регулирующего воздействия при значении регулируемого параметра:

±ΔU2 - величина приращения регулирующего воздействия при значении регулируемого параметра:

при значении степени очистки газа ниже заданного (случай защелачивания процесса):
 - значения регулируемого параметра, условно принятые в способе автоматического управления, при переходе через которые на объект подаются наперед заданные воздействия определенной величины ΔU1 или ΔU2 со знаком «+» или «-».
- значения регулируемого параметра, условно принятые в способе автоматического управления, при переходе через которые на объект подаются наперед заданные воздействия определенной величины ΔU1 или ΔU2 со знаком «+» или «-».
Подача на объект мощных дискретных воздействий производится по следующему условию:
Воздействие должно комплектоваться по следующему условию:

где:  - сигнал от газоанализатора, соответствующий концентрации сероводорода в очищенном газе;
- сигнал от газоанализатора, соответствующий концентрации сероводорода в очищенном газе;
 - заданные значения концентрации сероводорода.
- заданные значения концентрации сероводорода.
Сигналы А1, A2 Г заранее заготавливаются с помощью редукторов давления воздуха и подводятся к пневматическим реле вычислительного устройства.
 - верхнее значение регулируемого параметра.
- верхнее значение регулируемого параметра.
Допустим, что текущее значение параметра стало выше верхнего значения, т.е.  Пневмореле блока подготовки - II пропускает заранее заготовленное воздействие А1, которое алгебраически складывается в блоке суммирования - III со средним значением расхода кальцинированной соды.
Пневмореле блока подготовки - II пропускает заранее заготовленное воздействие А1, которое алгебраически складывается в блоке суммирования - III со средним значением расхода кальцинированной соды.
Сигнал с вычислительного устройства в качестве задания подается на регулирующий блок, который воздействует на клапан в сторону уменьшения подачи кальцинированной соды.
Если регулируемый параметр продолжает повышаться, т.е . пневмореле пропускает заранее заготовленное воздействие А2. Алгебраически складываясь с предыдущим значением расхода кальцинированной соды, сигнал в качестве задания поступает на регулирующий блок, который воздействует на клапан в сторону уменьшения подачи кальцинированной соды. Подобным же образом реализуется способ управления при изменении регулируемого параметра в сторону уменьшения т.е.
пневмореле пропускает заранее заготовленное воздействие А2. Алгебраически складываясь с предыдущим значением расхода кальцинированной соды, сигнал в качестве задания поступает на регулирующий блок, который воздействует на клапан в сторону уменьшения подачи кальцинированной соды. Подобным же образом реализуется способ управления при изменении регулируемого параметра в сторону уменьшения т.е.  . В случае «защелачивания», когда концентрация сероводорода в газе возрастает выше заданной, пневмореле пропускает сигнал «Г» - мощное дискретное воздействие - на систему в сторону уменьшения подачи кальцинированной соды.
. В случае «защелачивания», когда концентрация сероводорода в газе возрастает выше заданной, пневмореле пропускает сигнал «Г» - мощное дискретное воздействие - на систему в сторону уменьшения подачи кальцинированной соды.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения поглотительной способности раствора мышьяково-содовой очистки | 1986 |
|
SU1399669A1 |
| Способ очистки газа от сероводорода | 1977 |
|
SU738646A1 |
| Способ очистки газов от сероводорода и цианистого водорода | 1978 |
|
SU778755A1 |
| Способ управления технологией получения полнорационных комбикормов с использованием биогаза | 2024 |
|
RU2832084C1 |
| СПОСОБ ОЧИСТКИ ПРИРОДНОГО ГАЗА ОТ СЕРОВОДОРОДА | 1998 |
|
RU2179475C2 |
| Способ управления процессом десорбции | 1977 |
|
SU749409A1 |
| Способ управления процессом подготовки газа в производстве серы | 1978 |
|
SU1069619A3 |
| Способ получения сульфитной кислоты | 1980 |
|
SU967946A1 |
| Способ регенерации химикатов из дымовых газов сульфатно-целлюлозного производства | 1980 |
|
SU927876A1 |
| Установка для очистки попутного нефтяного и природного газа от серосодержащих соединений | 2019 |
|
RU2708853C1 |

Способ автоматического управления инерционным процессом, например процессом мышьяково-содовой сероочистки газов, заключающийся в поддержании величины рН регенерированного раствора в определенных пределах путем дискретного регулирования расхода реагента, отличающийся тем, что, с целью оптимизации технологического процесса, зону изменения регулируемого параметра разбивают на четыре предела - рН (второй - верхний), рН (первый - верхний), рН (первый - нижний), рН (второй - нижний) и предусматривают активное воздействие на объект при выходе регулируемого параметра за пределы рН (второй - верхний) и рН (второй - нижний).
