Используемые на самоходных глубоководных аппаратах ртутно-масляные дифферентные системы, имеют ряд недостатков: возможность диффузорного проникновения частиц ртути в масло и разносы их по всей гидросистеме, что отрицательно сказывается на работе ее энергетических средств и распределительных устройств; отсутствие возможности регулирования дифферентом для обеспечения маневрирования аппаратом в вертикальной плоскости.
Предлагаемая дифферентная система позволяет осуществлять управление дифферентом и улучшить маневренность аппарата в вертикальной плоскости, при движении его под водой малой скоростью, путем изменения его дифферента.
Достигается это тем, что дифферентная система снабжена мостовой следящей схемой на потенциометрах. Неподвижные сопротивления последних расположены одно на внутренней стенке ртутно-масляного баллона, другое - на корпусе пульта управления системой. Подвижные контакты потенциометров размещены один на штоке, укрепленном в центре диафрагмы баллона, другой - на подвижной рукоятке пульта управления системой. При этом подвижные контакты потенциометров замкнуты на обмотку поляризованного реле, осуществляющего управление электромагнитным краном.
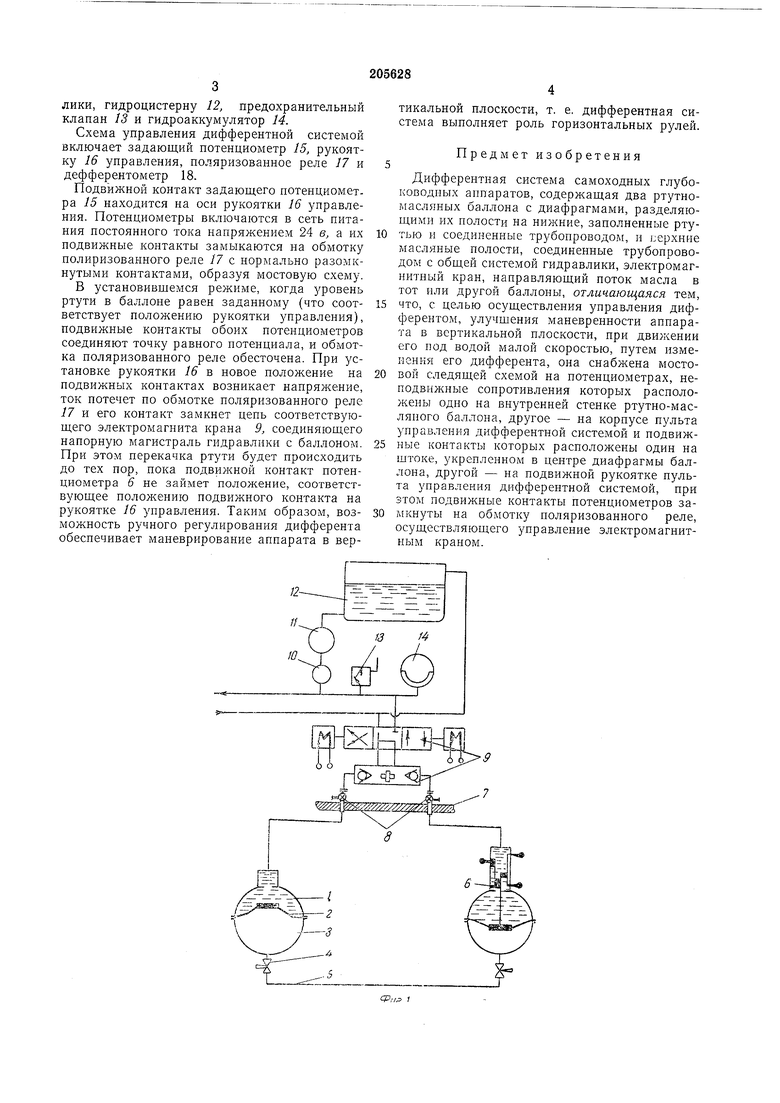
Дифферентная система содержит два ртутно-масляных баллона, размещенных в оконечностях аппарата. Внутренние полости баллонов разделены диафрагмой, изготовленной из маслостойкой резины, с металлическим диском в центре, выполняющим роль предохранительного затвора. Нижние полости баллонов, заполненные ртутью, соединены трубопроводом, а верхние полости баллонов с помощью масляного трубопровода включены в напорную магистраль общей системы гидравлики. В верхней полости одного из баллонов смонтирован потенциометр, подвижной контакт которого перемещается вместе со штангой, укрепленной на диске диафрагмы. При этом положение контакта потенциометра соответствует уровню ртути в баллоне.
Изменение дифферента аппарата достигается перекачкой ртути из одного баллона в
другой путем вытеснения ее маслом, накачиваемым насосом гидравлики.
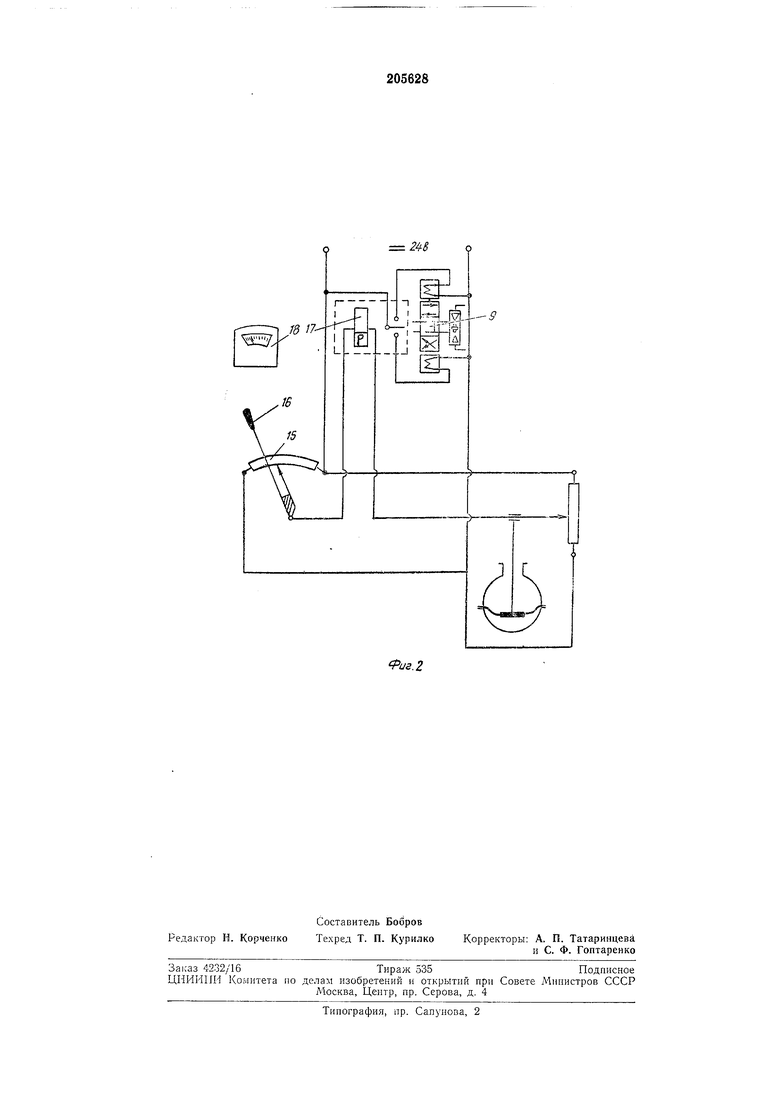
На фиг. 1 показана схема дифферентной системы; на фиг. 2 - схема управления дифферентной системой.
Дифферентная система содержит ртутномасляные баллоны 1, разделительные диафрагмы 2 баллонов, ртуть 3, зарядные краны 4 баллонов, ртутный трубопровод 5,, потенциометр 6 баллона, корпус аппарата 7, бортовые
лики, гидроцистерну 12, предохранительный клапан 13 и гидроаккумулятор 14.
Схема управления дифферентной системой включает задающий потенциометр 15, рукоятку 16 управления, поляризованное реле 17 и дефферентометр 18.
Подвижной контакт задаюпдего потенциометра 15 находится на оси рукоятки 16 управления. Потенциометры включаются в сеть питания постоянного тока напряжением 24 в, а их подвижные контакты замыкаются па обмотку полиризованного реле 17 с нормально разомкнутыми контактами, образуя мостовую схему.
В установившемся режиме, когда уровень ртути в баллоне равен заданному (что соответствует положению рукоятки управления), подвижные контакты обоих потенциометров соединяют точку равного потенциала, и обмотка поляризованного реле обесточена. При установке рукоятки 16 в новое положение на подвижных контактах возникает напряжение, ток потечет по обмотке поляризованного реле 17 и его контакт замкнет цепь соответствующего электромагнита крана 9, соединяющего напорную магистраль гидравлики с баллоном. При этом перекачка ртути будет происходить до тех пор, пока подвижной контакт потенциометра 6 не займет положение, соответствующее положению подвижного контакта на рукоятке 16 управления. Таким образом, возможность ручного регулирования дифферента обеспечивает маневрирование аппарата в вертикальной плоскости, т. е. дифферентная система выполняет роль горизонтальных рулей.
Предмет изобретения
Дифферентпая система самоходных глубоководных аппаратов, содержащая два ртутномасляных баллона с диафрагмами, разделяющими их полости на нижние, заполненные ртутью и соединенные трубопроводом, и верхние масляные полости, соединенные трубопроводом с общей системой гидравлики, электромагнитный кран, направляющий поток масла в тот или другой баллоны, отличающаяся тем,
что, с целью осуществления управления дифферентом, улучшения маневренности аппарата в вертикальной плоскости, при движении его под водой малой скоростью, путем пзмепения его дифферента, она снабжена мостовой следящей схемой на потенциометрах, неподвижные сопротивления которых расположены одпо на внутренней стенке ртутно-масляпого баллона, другое - на корпусе пульта управления дифферентной системой и подвижные контакты которых располол :ены один на штоке, укрепленном в центре диафрагмы баллона, другой - на подвил ной рукоятке пульта управления дифферентной системой, при зтом подвижные контакты потенциометров замкнуты на обмотку поляризованного реле, осуществляющего управление электромагнитным краном.
а
24S
| название | год | авторы | номер документа |
|---|---|---|---|
| Система уравнительно-дифферентная для автономного необитаемого подводного аппарата с автоматическим и дистанционным управлением | 2019 |
|
RU2721638C1 |
| Система изменения плавучести и дифферента АНПА с автоматическим управлением | 2019 |
|
RU2724920C1 |
| ДИФФЕРЕНТНАЯ СИСТЕМА ПОДВОДНОГО ТЕХНИЧЕСКОГО СРЕДСТВА | 2014 |
|
RU2585392C2 |
| ПОДВОДНЫЙ АППАРАТ | 2000 |
|
RU2172699C1 |
| Транспортировщик водолазов | 2017 |
|
RU2667113C1 |
| АВТОМАТИЧЕСКОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1934 |
|
SU45663A1 |
| Аппарат для автоматического управления нажимным устройством прокатного стана | 1935 |
|
SU77023A1 |
| Водолазно-спасательный глубоководный аппарат | 2020 |
|
RU2764140C1 |
| ПОДВОДНЫЙ ТАНКЕР | 1993 |
|
RU2062731C1 |
| УНИВЕРСАЛЬНАЯ ГЕНЕРИРУЮЩАЯ УСТАНОВКА ТЕПЛОВОГО ГАЗОВОГО ПОТОКА НА ШАССИ ТАНКА | 2004 |
|
RU2279034C1 |