Предметом изобретения является аппарат для автоматического управления нажимным устройством прокатного стана, состоящий из двух следящих систем и из поляризованных реле, управляющих контакторами электродвигателя нажимного устройства.
Отличительная особенность предлагаемого аппарата-применение неравномерных ступеней сопротивлений в следящих системах, обеспечивающих одинаковую чувствительность реле любых положениях, а также наличие в схеме ряда дополнительных устройств, обеспечивающих автоматическую работу схемы в соответствии с требованиями технологического процесса.
На фиг. 1-5 приведены электрические схемы отдельных узлов аппарата в различных вариантах исполнения.
Двигатель, переставляющий валки прокатного стана, управляется с помощью контакторов, цепи катущек которых, в свою очередь, замыкаются поляризованными реле 1, 2, 5 или 6 аппарата для автоматического управления нажимным устройством. Указанный аппарат включает в себя, кроме поляризованных реле, две следящих системы для грубого и точного контроля.
Каждая такая система состоит из передатчика, задающего в определенной последовательности относительные положения валков прокатного стана, и приемника, жестко связанного с электродвигателем перестановки валков и фиксирующего относительные положения валков в каждый данный момент. Следящие системы могут быть выполнены в вариантах: по потенциометрической или же мостовой схеме.
В первом варианте (фиг. 1) приемник 7 и передатчик 10 грубой системы представляют собой потенциометры, присоединенные к обычным коллекторам со скользящими щетками. Между щетками приемника и передатчика включены два поляризованных реле 1 и 2 с обмотJ o 77023- 2 -
ками возбуждения lA и 2А. В зависимости от отиосительпого расположения щеток приемника и передатчика будет срабатывать либо реле 1, либо реле 2, вызывая включение соответствующих контакторов в цепи электродвигателя перестановки валков. Каждое из указанных реле срабатывает при интервале в две коллекторные пластины. Если между всеми коллекторными пластинами будут включены одинаковые сопротивления, то при одинаковом интервале между щеткой приемника и щеткой передатчика, мощность в рабочей обмотке реле будет зависеть от расноложения щеток. Если щетки расположены у края потенциометра, то мощность в рабочей обмотке реле повышается и может оказаться достаточной для удержания одного из реле во включенном положении или же срабатывания его, даже в том случае, когда интервал между щетками приемника и передатчика составляет всего одну пластину. Для того, чтобы избежать запаздывания в отключении или ложного срабатывания реле, между отдельными пластинами коллектора включаются неодинаковые сопротквления; у середин потенцио1метров они больще, а у краев меньше.
Использованием такого неравномерного распределения сопротивлений достигается, во-первых, одинаковая чувствительность реле при любых положениях следящих систем, и, во-вторых, получение максимальной мощности в рабочей обмотке реле при заданном потреблении мощности потенциометрами.
Приемник 11 и передатчик 12 точной системы при первом варианте выполняются в виде потенциометров.
Реле 5 и 6, включенные между щетками точной системы приемника и передатчика, кроме главных обмоток возбуждения 5А и 6А имеют еще дополнительные обмотки возбуждения 5Б и 6Б, ампервитки которых в два раза больще главных ампервитков возбуждения и направлены в противоположную сторону. Если щетки приемника и передатчика расположены на одноименных половинах потенциометра, т. е. оба справа или оба слеза, то цепь дополнительной обмотки ра.зорвана и включена только основная обмотка возбуждения. Если же щ.етки приемника и передатчика располол ены на разноимен1П)х половинах потенциометра, то включается дополнительная обмотка и результирующий поток возбуждения будет направлен в обратную сторону. В приведенных схемах используются электромагнитные реле; однако вместо них могут быть применены любые электронные или тиратронные реле.
Во втором варианте (фиг. 2) приемник 11 и передатчик 12 точной системы представляют собой ряд секций сопротивлений, имеющих отпайки к коллектору. По каждому коллектору движется пара щеток, сдвинутая относительно друг друга на некоторый постоянный угол, заГ.ИСРЩНЙ От числа секций и количества коллекторных пластин. При положении щеток, изображенном на фиг. 2, части секции приемника и передатчика, соединенные последовательно, представляют собой одно плечо моста, остальными плечами которого являются сопротивления 13, 14 и 15. При некотором положении щеток приемника относительно щеток передатчика плечи моста находятся в равновесии и в диагонали моста ток не протекает. Если положение щеток меняется в ту или иную сторону, то соответственно в ту или иную сторону нарущится равновесие моста и сработает реле 5 или 6.
При обоих вариантах предусматривается наличие соответствующих электрических блокировок между реле 1-2 и 5-6 следящих систем грубого и точного контроля при помощи блокировочных контактов указанных реле и реле 8 с целью достижения нужной очередности действия этих реле.
Для обеспечения максимальной скорости перестановки валков целесообразно применить электропривод по системе Леонарда с использованием ртутных выпрямителей для управления возбуждением генератора.
Управление электродвигателем перестановки валков осуществляется с помощью вышеуказанной следящей мостовой системы, управляющей сетками ртутных выпрямителей, в зависимости от угла рассогласовани1Я и скорости электродвигателя.
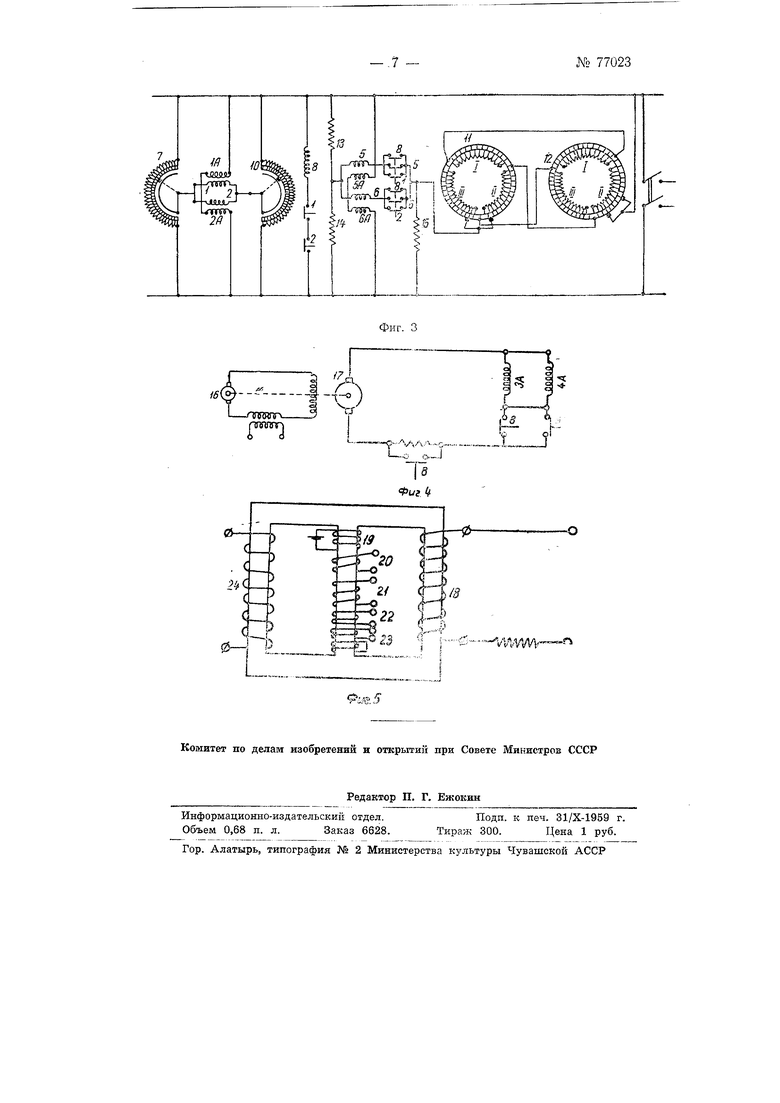
Разгон электродвигател я по оптимальной кривой обеспечивается схемой (фиг. 3), где в диагонали следящей мостовой схемы включены реле 1, 2, 3 и 4. Катущки этих реле подключаются контактами 1реле 9 к грубой или к точной следящей системе в зависимости от величины рассогласования между датчиком и приемником.
В зависимости от направления тока в диагонали моста срабатывают реле 1 и 3 (или 2 и 4) и включают ртутный выпрямитель, питающий обмотки возбуждения «вперед или «назад электродвигателя. Поляризованные реле снабжены дополнительными намагничивающими обмотками ЗА и 4А, питаемыми током, пропорциональные квадрату скорости электродвигателя.
Устройство, создающее э.д.с., пропорциональную квадрату скорости двигателя, может быть выполнено, например, по схеме (фиг. 4), где тахогенератор 16, связанный с осью электродвигателя перестановки валков, питает обмотки возбуждения второго тахогенератора 17, также установленного на валу электродвигателя. Э.д.с., создаваемая мащиной 17, будет, таким образом, пропорциональна квадрату скорости двигателя.
Регулирование электродвигателя перестановки валков по оптимальной кривой при использовании схемы Леонарда с ртутными выпрямителями может быть осуществлено и без применения электромеханических реле путем непосредственного воздействия па сетки ртутных выпрямителей от напряжения диагонали следящего моста.
Для этой цели служит специальный трансформатор (фиг. 5), имеющий семь обмоток. Обмотка 18 включена на напряжение, синхронное с анодным напряжением данной фазы ртутного выпрямител;я, но сдвинутое от него по фазе на 90°; обмотка 19 включена на постоянное напряжение и предназначена для подмагничивания железа трансформатора. Обмотка 20 включена на напряжение диагонали грубой системы следящего моста, обмотка 21-на напряжение диагонали тонкой системы следящего моста, обмотка 22-на напряжение, пропорциональное квадрату скорости мотора перестановки валков, и обмотка 23-на напряжение, пропорциональное ускорению мотора; с обмотки 24 снимается переменное напряжение, которое подается на соответств1ующую сетку ртутного выпрямителя.,
В предлагаемом аппарате может быть так же использовано программное реле, например, типа регистратора АТС, обеспечивающее требуемую последовательность включения отдельных механизмов, управляющих станком, аварийный ограничитель давления на валки, выполняемый, например, по схеме емкостного моста, а также программное реле для совмещения во времени работы нескольких различных механизмов и предварения управляющего импульса. Применение последнего реле позволяет сэкономить время срабатывания промежуточных реше и других механизмов и существенно повысить производительпость стана.
П р С: д ii е т изо б р с т е н и я
1. Аппарат для автоматического управления нажимным устройством прокатного стана, состоящий из двух следящих потенциометрических
№ 77023
№ 77023
или мостовых систем различной точности и из поляризованиых (электромеханических, электронных или ионных) реле, реагирующих на неуравновешенрюсть ачедящих систем и служащих для управления контакторами электродвигателя нажимпого устройства, отличающийся тем, что, с целью обеспечения одинаковой чувствительности реле на любых положениях следящих систем и предотвращения перерегулировки путем создания опережения в действии реле, ступени сопротивлений в следящих системах выбраны неравномерными и реле соразмерены так, чтобы приходили в действие несколько раньще достижения уравновещенности следящих систем.
2.В аппарате по п. I применение электрической блокировки между реле следящих систем различной точности с целью достижения нужной очередности действи я этих реле.
3.Форма выполнения аппарата по пп. 1, 2, отличающаяся тем, что пол.яризованные реле снаб.жены дополнительными размагничивающими обмотками, питаемыми током, пропорциональным квадрату скорости двигателя с целью осуществления работы электродвигателя по оптимальной кривой скорости.
4.Форма выполнения аппарата по пп. 1-3, отличающаяся применением реле, включенпого через контакты двух приемников следящих систем и служап1его ;;ля переключения поляризованных реле с одного приемника на другой, в зависимости от величины рассогласования между датчико.м и приелзннком.
5.Видоизменение аппарата по п. 3, отличающееся тем, что ,в случае использования ртутных выпрямителей с сетками для питания электродвигателя, для управления цепями сеток применен трансформатор, две обмотки подмагннчиванпя которого включены в цепи диагонали следяшЛ1х систем, третья-на постоянное напряжение, четвертая обмотка включена в цепь анодного напряжения со сдвигом на 90°, пятая-на напряжепне, пропорциональное квадрату скорости электродвигателя, щестая-на напряжение, пропорциональное ускорению электродвигателя, а седьмая- служит для пол,ачи напряжения на сетку ртутного выпрямителя.
6.В аипарате по пп. 1-5 примеиение программного реле для автоматического осуществления нужной последовательности .включення отдельных механизмов, управляющих станком.
7.В аппарате по пп. I-6 примененне аварийного ограничителя давления металла на валки.
8.В аппарате по п. 6 использование программного реле для совмещения (во времени) работы отдельных мехаиизмов путем предварения в подаче импульсов на включение различных механизмов и для своевременной подачи управляющих импульсов на ряд механизмов.
vTi - ,
.x
%да
-I
/m.«:5:i® xVA Ц ..
i
..,..4
,
el


| название | год | авторы | номер документа |
|---|---|---|---|
| Следящее устройство | 1937 |
|
SU56723A1 |
| Следящее устройство | 1937 |
|
SU59433A1 |
| Автоматический регулятор | 1937 |
|
SU58790A1 |
| Устройство для автоматического управления углом поворота лопастей рабочего колеса гидравлической турбины Каплана | 1940 |
|
SU61004A1 |
| Устройство для принудительного синхронного и синфазного вращения генераторов переменного тока | 1934 |
|
SU43955A1 |
| Копирующий манипулятор | 1979 |
|
SU812562A1 |
| Следящее устройство | 1937 |
|
SU61302A1 |
| СПОСОБ КОНТРОЛЯ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ ЛОКОМОТИВОВ ПОСТОЯННОГО И ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2540048C2 |
| БУКВОПЕЧАТАЮЩИЙ ТЕЛЕГРАФНЫЙ АППАРАТ СИСТЕМЫ СИМЕНСА | 1928 |
|
SU17372A1 |
| Программно-следящее устройство | 1937 |
|
SU59719A1 |