Известные способы преобразования сопротивления датчика в функцию частоты (или периода) синусоидального колебания с помощью усилителя, охваченного несколькими цепями обратной связи, не обеспечивают высокой линейности преобразования и приводят к появлению сопутствующей амплитудной .модуляции.
Описываемый способ позволяет существенно повысить линейность характеристики преобразования и обеспечивает практически полное отсутствие паразитной амплитудной модуляции.
Это достигается в результате того, что выходное напряжение измерительного моста, включенного в одну из цепей обратной связи и содержащего датчик сопротивления, корректируют по фазе и подают одновременно на две параллельные цепи, в одной из которых его фазу частотно-независимо поворачивают на минус 90°, а во второй - интегрируют. Затем оба напряжения линейно суммируют и подают на вход основного усилителя, образующего вместе с дву.чя другими цепями обратной связи колебательную систему, питающую измерительный мост.
а вторая частотно-зависимая, образует собственно колебательную линейную систему, генерирующую гармонические колебания.
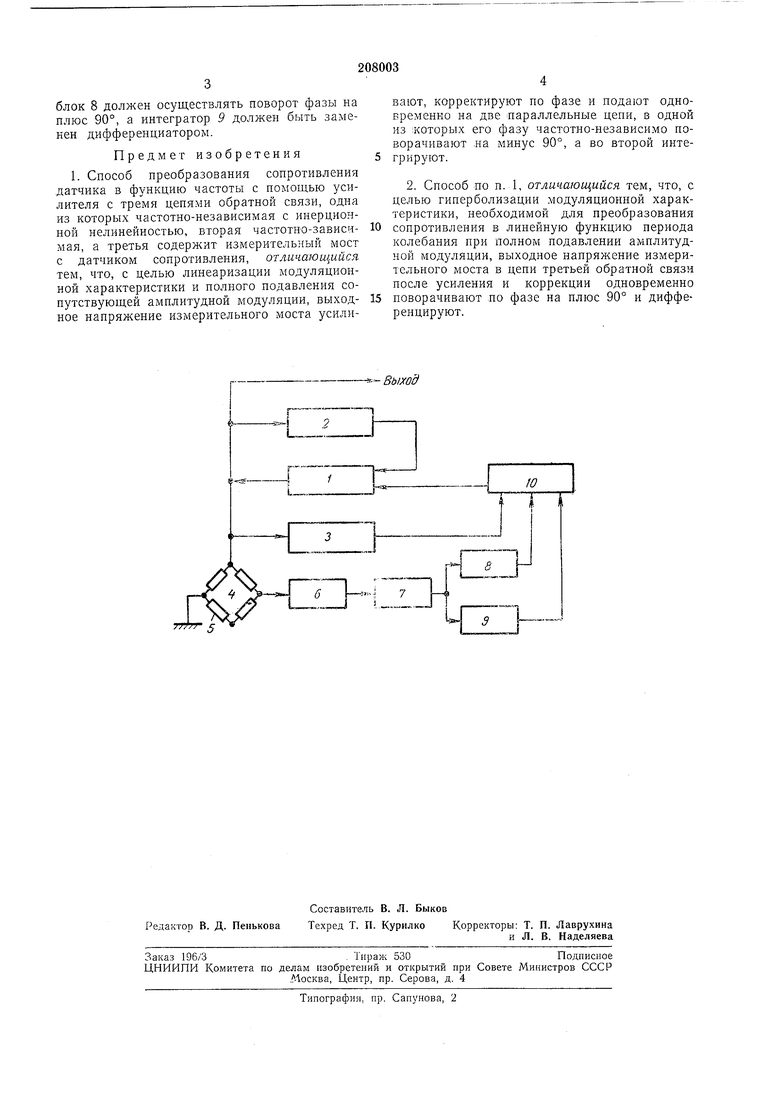
Помимо двух первых цепей обратной связи, имеется также третья цепь, содержащая измерительный мост 4, в одно из плеч которого включен датчик сопротивления 5, усилитель 6 и фазовый корректор 7.
Выходное напряжение корректора подается одновременно на две цепи 8 и 9. Цепь 8 осуществляет частотно-независимый поворот фазы напряжения на минус 90°, цепь 9 представляет собой интегратор. Выходные напряжения обеих цепей суммируются сумматором
10 с напряжением основной цепи частотно-зависимой обратной связи 3 и поступают на вход усилителя 1.
Параллельное соединение двух частотнозависимых цепей обратной связи и введение
в одну из них указанных фазокорректирующих и интегрирующего блоков позволяет осуществить л.инейное преобразование сопротивления датчика 5 в частоту колебаний выходного напряжения усилителя 1 в широком
диапазоне изменения частоты и практически без появления паразитной амплитудной модуляции.
блок 8 должен осуществлять поворот фазы на плюс 90°, а интегратор 9 должен быть заменен дифференциатором.
Предмет изобретения
1. Способ преобразования сопротивления датчика в функцию частоты с помощью усилителя с тремя цепями обратной связи, одна из которых частотно-независимая с инерционной нелинейностью, вторая частотно-зависимая, а третья содержит измерительный мост с датчиком сопротивления, отличаюш ийся тем, что, с целью линеаризации модуляционной характеристики и полного подавления сопутствующей амплитудной модуляции, выходное напряжение измерительного моста усиливают, корректируют по фазе и подают одновременно на две параллельные цепи, в одной из :которых его фазу частотно-независимо поворачивают .на минус 90°, а во второй интегрируют.
2. Способ по п. 1, отличающийся тем, что, с целью гиперболизации модуляционной характеристики, необходимой для преобразования
сопротивления в линейную функцию периода колебания при полном подавлении амплитудной модуляции, выходное напряжение измерительного моста в цепи третьей обратной связи после усиления и коррекции одновременно
поворачивают по фазе на плюс 90° н дифференцируют.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ АНАЛОГОВОЙ ВЕЛИЧИНЫ В ЧАСТОТНО-МОДУЛИРОВАННЫЙ СИГНАЛ | 1970 |
|
SU268760A1 |
| ЧАСТОТНЫЙ ДАТЧИК | 1966 |
|
SU223151A1 |
| Устройство для воспроизведения сигналов | 1980 |
|
SU892469A2 |
| УНИВЕРСАЛЬНЫЙ МОДУЛЬ ЧАСТОТНОГО ИНТЕГРИРУЮЩЕГО РАЗВЁРТЫВАЮЩЕГО ПРЕОБРАЗОВАТЕЛЯ ДЛЯ ДАТЧИКОВ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2016 |
|
RU2631494C1 |
| ИНТЕГРАТОР ПРОМЕЖУТОЧНОЙ ЧАСТОТЫ | 1972 |
|
SU359668A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2001 |
|
RU2207522C2 |
| Формирователь сигналов с линейной частотной модуляцией | 1990 |
|
SU1826119A1 |
| Преобразователь сопротивления в частоту | 1974 |
|
SU557468A1 |
| Частотный преобразователь | 1975 |
|
SU549888A1 |
| Измерительный преобразователь активной мощности | 1989 |
|
SU1659890A1 |
fZbi iZH
Выход
L..
