Известны устройства для управления статическим коэффициентом усиления динамического звена, в которых измерение коэффициента усиления осуществляется путем оценки косвенного параметра, зависящего от коэффициента усиленияПредложенное устройство отличается от изBecTHbfx тем, что в нем установлены два интегратора, подключенные ко входу и выходу звена, и блок деления, ко входам которого подсоединены выходы интеграторов, а выход блока деления подключен ко второму входу сравнивающего устройства. Это позволяет обеспечить стабилизацию коэффициента усиления функционирующего динамического звена в нормально импульсном режиме его работы. На чертеже приведена блок-схема предложенного устройства. В цепи входного и выходного сигналов объекта 1 автоматизации подключены интегрирующие устройства 2 и , выходы которых подключены к блоку 4 деления. Выход блока деления подсоединен к сравнивающему устройству 5 формирования сигнала ошибки, на втором входе которого устанавливается требуемое (или изменяемое по программе) значение статического коэффициента усиления объекта от задатчика 6. Выход устройства 5 подключен к исполнительному элементу 7 системы подстройки коэффициента усиления. Рассмотрим систему, работающую в длинно-импульсном режиме. Ее сигнал представляет собой последовательность одиночных импульсов, ограниченных по величине, но произвольных по форме и времени существования и удовлетворяющих условию XirrO 0 x(t) x(t) (1) л;2 г о/ г Так как значение сигнала на выходе системы связано с ее входным сигналом x(t) соотношениемy(s,t) W (s,t)x(s,t),(2) где , t - момент времени наблюдения, то при получим для каждого фиксироранного момента наблюдения значение статического коэффициента усиления в виде W(0,t) k(i) Ь()Л или для стационарной системы .f у (О dt
Отсюда видно, что, подавая на интеграторы соответственно выходной и входной сигналы системы и определяя их отношение, можно получить значение статического коэффициента усиления. При этом оказывается возможным определение статического коэффициента усиления для системы с переменными парал1етрами. Длительность интегрирования по формуле (4) при этом определяется величиной постоянной времени системы, а применимость формулы (3) для нестационарных объектов зависит как от постоянной времени, так и от скорости изменения параметров объекта.
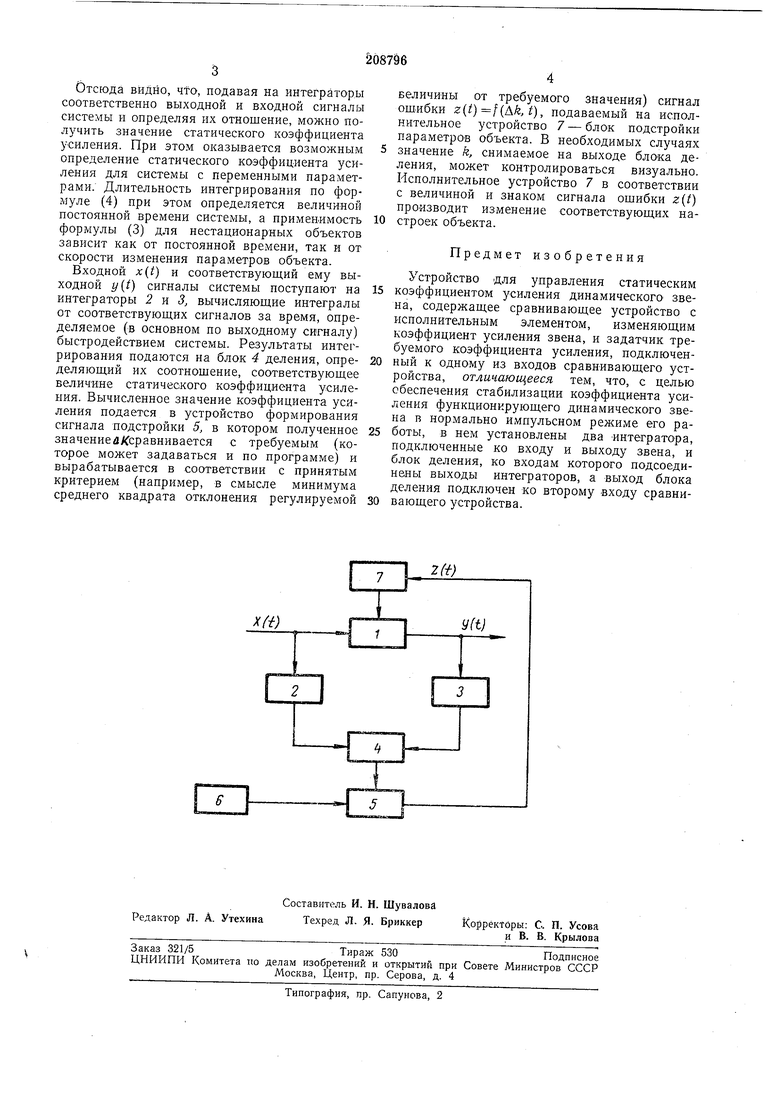
Входной x(t) и соответствующий ему выходной y(t) сигналы системы поступают на интеграторы 2 и 3, вычисляющие интегралы от соответствующих сигналов за время, определяемое (в основном по выходному сигналу) быстродействием системы. Результаты интегрирования подаются на блок 4 деления, определяющий их соотношение, соответствующее величине статического коэффициента усиления. Вычисленное значение коэффициента усиления подается в устройство формирования сигнала подстройки 5, в котором полученное значениед/Ссравнивается с требуемым (которое может задаваться и по программе) и вырабатывается в соответствии с принятым критерием (например, в смысле минимума среднего квадрата отклонения регулируемой
величины от требуемого значения) сигнал ощ-ибки z(t)f(Ak,t), подаваемый на исполнительное устройство 7 - блок подстройки параметров объекта. В необходимых случаях значение k, снимаемое на выходе блока деления, может контролироваться визуально. Исполнительное устройство 7 в соответствии с величиной и знаком сигнала ошибки z(t) производит изменение соответствующих настроек объекта.
Предмет изобретения
Устройство для управления статическим
коэффициентом усиления динамического звена, содержащее сравнивающее устройство с исполнительным элементом, изменяющим коэффициент усиления звена, и задатчик требуемого коэффициента усиления, подключенный к одному из входов сравнивающего устройства, отличающееся тем, что, с целью обеспечения стабилизации коэффициента усиления функционирующего динамического звена в нормально импульсном режиме его работы, в нем установлены два интегратора, подключенные ко входу и выходу звена, и блок деления, ко входам которого подсоединены выходы интеграторов, а выход блока деления подключен ко второму входу сравнивающего устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для СТАБИЛИЗАЦИИ СТАТИЧЕСКОГО КОЭФФИЦИЕНТА УСИЛЕНИЯ ДИНАМИЧЕСКОГО ЗВЕНА | 1969 |
|
SU247375A1 |
| УСТРОЙСТВО для КОНТРОЛЯ и НАСТРОЙКИ ТЕКУЩИХ ХАРАКТЕРИСТИК ОБЪЕКТА УПРАВЛЕНИЯ | 1966 |
|
SU188544A1 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| Устройство автоматического регулирования скорости подачи угледобывающей машины | 1980 |
|
SU912930A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПО ИНТЕГРАЛУ КОМПЕНСИРУЮЩЕГО ВОЗДЕЙСТВИЯ | 2003 |
|
RU2285281C2 |
| Устройство для управления приводом манипулятора | 1989 |
|
SU1673433A1 |
| Устройство для импульсного регулирования | 1977 |
|
SU697967A1 |
| САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ СТАТИЧЕСКОЙ ОШИБКИ В АВТОМАТИЧЕСКИХ СИСТЕМАХ СТАБИЛИЗАЦИИ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2012 |
|
RU2505847C1 |
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
| Устройство для управления вибрацией | 1981 |
|
SU1003017A1 |
Xff)
-н:
y(t)
