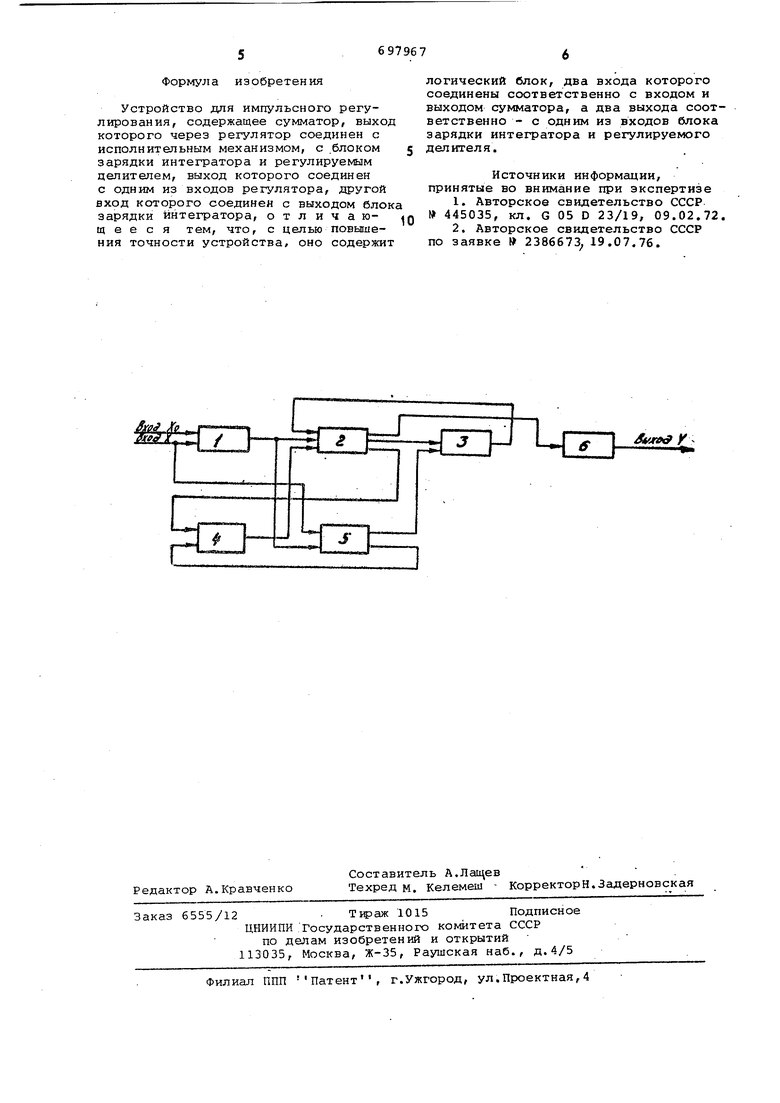
Изобретение относится к регулирующим устройствам, предназначенным для управления широким классом общепромлшленных объектов, характеризующихся воздействием на них ненаблюдаемых внешних возмущений и большим диапазоном изменения динамических и статических характеристик. Известны регулирующие устройства, формирующие на выходе последовательность импульсов, средняя составляюща которых изменяется по пропорционально-интегрально- дифференциальным (ПИД или пропорционально-интегральным (пи законам регулирования 1. В указанных устройствах отсутствует возможность автоматической подстройки, общего коэффициента пропорци ональности при изменении статических и динамических характеристик объекта Наиболее близким к предлагаемому по технической сущности является устройство, содержащее сумматор, выход которого через регулятор соедине с исполнительным механизмом, с блоко зарядки интегратора и регулируемым делителем, выход которого соединен с одним из входов регулятора, другой вход которого соединен с выходом блока зарядки интегратора 2, Известное устройство имеет низкую точность регулирования. Цель изобретения - повышение точности устройства. Указанная цель достигается тем, что предлагаемое устройство содержит логический блок, два входа которого соединены соответственно с входом и выходом сумматора, а два выхода соответственно - с одним из входов блока зарядки интегратора и регулируемого делителя. На чертеже изображена блок-схема. регулятора с импульсным выходом. Устройство содержит сумматор 1, регулятор 2, блок 3 зарядки интегратора, регулируемый делитель 4, логический блок 5, исполнительный механизм 6. В сумматоре 1 формируется сигнал ошибки , равный разности между сигналом параметра х и сигналом Зсщания х . Сигнал поступает на один из входов регулятора 2, на два других входа которого поступают выходные сигналы с блока зарядки интегратора 3 и регулируемого делителя 4. На выходе регулятора 2 формируется последовательность импульсов, средняя составляющая которых, выделяемая исполнителышм механизмом 6, изменяется по ПИ- или ПИД-законам регулирова ния. Параметры цепи заряда интеграто ра 3 и коэффициент деления регулируе мого делителя 4 полностью определяют значение общего коэффициента пропор .циональности устройства, пропорционального длительности формируемых регулятором импульсом, и не зависят от динамических и статических характеристик объекта регулирования, при изменении которых в логическом блоке 5 изменяется соотношение непрерыв но измеряемых сигналов ошибки е и параметра х относительно заданного в логическом блоке 5 соотношения си налов сшибки и производных сигнала X. Логический блок 5 автоматичес ки изменяет коэффициент деления регулируемого делителя 4 (или парамет ры блока зарядки интегратора 3) так образом, что устанавливается новое среднее за время регулирования значение коэффициента тгропорциональнос ти устройства, компенсирующее данно изменение.. Дополнительно введенный логический блок можно описать следующей нелинейной логической функцией, свя зывающей его выходную величину Y; с непрерывно измеряемыми значениями величин сигнала параметра (ошибки) и его производных, характеризующих динамические свойства объекта . (t,x,x,.,,(1) где tpj - i-H нелинейная логическая функция; время; значение входного ситнала параметра;, первая производная входного сигнала параметра; п-я производная входного сигнала параметра. В частности, нелинейный логический блок можно описать системой уравнений при s(t,x,x)40 при s(t,x,x)0 , (2) 4г- при s(t,x,x) 0 при s(t,x,x)0 f нелинейные логические функции, зависящие от динамических и статиче ких характеристик объе та регулирования; значения постоянной вр мени, которые принимае блок зарядки интеграто ра и которые выбираютс из условия .г -iap.i минимально возможное з чение пострянной време блока зарядки интеграт ра; К и К - значения коэффициентов деления, которые принимает регулируемый дели-, тель 4, при этом 1 К2 К, (t,x,i) - функция переключения логического блока, зависящая от динамических и статических характеристик объекта, которую, например, можно представить формулой г:((:т при - /€/+Д/х/+В 0 ) при - / /+д/х/+В40 4) S+Eде Е,А,В,Т постоянные величины, характеризующие параметры логического блока, причем и x-Xg - сигнал ошибки. Анализируя выражения 2 и 3, можно делать вывод, что коэффициент проорциональности предлагаемого устойства имеет вид Кп (5) В предлагаемом устройстве функциоальная связь между входными сигналаи и положением выходного органа исолнительного механизма имеет вид ф.-шо d. Г„Ыф2е)Иб) н - . где Y - текущее угловоеположение вала исполнительного механизма (ИМ) ; начальное положение вала ИМ; сигнал рассогласования (ошибка); время хода ИМ (100%); постоянная времени интегрирования;постоянная времени дифференцирования. Из анализа приведенных выражений (1-6) следует, изменении коэффициента усиления объекта в пределах Кд, 4 К 4 изменяется заданное соотношение непрерывно измеряемых параметров х и и логический блок переключается таким образом, что устанавливается новое среднее значение коэффициента пропорциональности регулятора, компенсирующее данное изменение, т.е. устройство автоматически подстраивает свой коэффициент пропорциональности при изменении динамических или. статических характеристик объекта. Предлагаемое устройство может найти широкое применение в АСУП различных отраслей промышленности, так как позволяет автоматически устанавливать общий коэффициент-передачи регулятора при изменении в широких пределах динамических и статических характеристик объекта регулирования, что значительно повышает качество управления.
Формула изобретения
Устройство для импульсного регулирования, содержащее сумматор, выход которого через регулятор соединен с исполнительным механизмом, с .блоком зарядки интегратора и регулируемым целителем, выход которого соединен с одним из входов регулятора, другой вход которого соединен с выходом блок зарядки интегратора, отличающ е е с я тем, что, с целью повышения точности устройства, оно содержит
логический блок, два входа которого соединены соответственно с входом и выходом сумматора, а два выхода соответственно - с одним из входов блока зарядки интегратора и регулируемого делителя.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
№ 445035, кл. G 05 D 23/19, 09.02.72.
2.Авторское свидетельство СССР по заявке 2386673 19.07.76.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический регулятор | 1978 |
|
SU840796A1 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2571371C2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| СПОСОБ РАБОТЫ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО РЕГУЛЯТОРА | 2014 |
|
RU2573731C2 |
| Система экстремального регулирования | 1981 |
|
SU1056132A1 |
| Бинарная система управления нелинейными объектами | 1985 |
|
SU1305631A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПО ИНТЕГРАЛУ КОМПЕНСИРУЮЩЕГО ВОЗДЕЙСТВИЯ | 2003 |
|
RU2285281C2 |
| САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ СТАТИЧЕСКОЙ ОШИБКИ В АВТОМАТИЧЕСКИХ СИСТЕМАХ СТАБИЛИЗАЦИИ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2012 |
|
RU2505847C1 |
| Вентильный электропривод постоянного тока | 1977 |
|
SU1010711A2 |
