Изобретение относится к системам автоматического управления.
Известны устройства для стабилизации статического коэффициента усиления динамического звена, содержащие сравнивающее устройство с исполнительным механизмом, изменяющим коэффициент усиления звена. К одному из ВХОДОВ сравнивающего устройства подключен задатчик требуемого коэффициента усиления, ко второму - блок давления с двумя входами, подсоединенными к выходам интеграторов.
Известные устройства не дают возможности управлять статическим коэффициентом усиления непрерывно функционирующего звена.
Предложенное устройство отличается от известных тем, что В нем установлены два многоточечных коррелятора с подключенными последовательно ко входному зажиму интегратором, перемножителем, запоминающим устройством и дифференциатором. Выходные зажимы обоих дифференциаторов подключены ко входам соответствующих интеграторов, ВХОДНОЙ зажим интегратора первого коррелятора подключен ко входу динамического звена и ко вторым входам обоих перемножителей, а ВЫХОД динамического звена подключен ко входному зажиму второго коррелятора.
динамического звена в непрерывном режиме его работы.
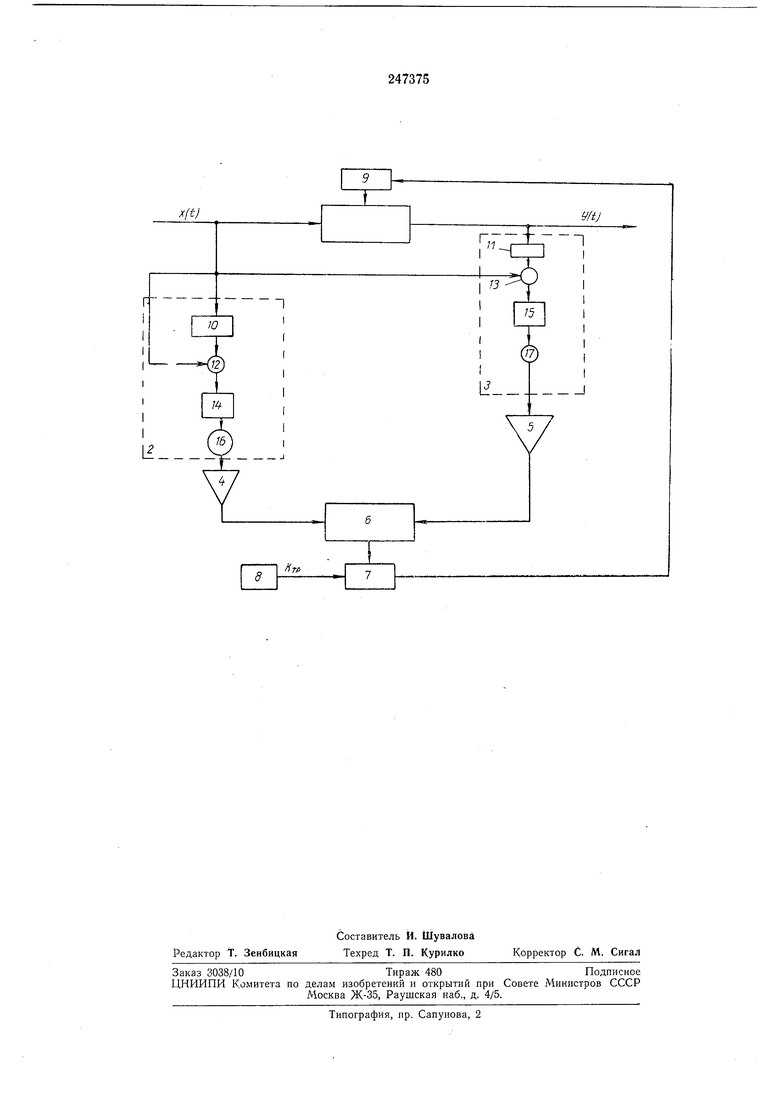
На чертеже приведена блок-схема устройства.
К цепи ВХОДНОГО и выходного сигналов динамического звена объекта автоматизации / подключены многоточечные корреляторы 2 и 3. Коррелятор 3 вычисляет взаимную корреляционную функцию. К выходам корреляторов подключены интеграторы 4 w. 5, выходы которых подключены к блоку деления 6. Выход блока деления подключен к сравнивающему устройству 7 формирования сигнала ошибки, на втором входе которого устанавливают (или задают другим способом) требуемое значение статического коэффициента усиления с задатчика 8. Выход устройства формирования сигнала ошибки подключен к исполнительному устройству 9 системы подстройки коэффициентов усиления. Интеграторы 10 и 11 вычисляют соответственно интегралы tt
|A;(T)dt и y()dr.
Запоминающие устройства 14 и 15 фиксируют значения интегралов z(t в интервале времени (О, Tj,). При N-кратном повторении циклов работы в них реализуются функции
(t) V|/C,/.)d.; F., (О (.)d.
Сигналы на выходе дифференциаторов 16 и 17 соответствуют корреляционной функции Kjfy (t) и /С;р(т). в зависимости от диапазона частот, в котором предполагается работа устройства, выходные цепи корреляторов могут содержать либо НС-щеПочки, либо иные элементы, например операциоиные усилители.
Рассмотрим систему, работающую в непрерывном режиме функционирования, такую, что ее сигналы существуют в течение достаточно больщого интервала времени.
Работа стационарной системы описывается интегральным соотношением:
со
,(-S)xG)rf.
где Kjf(T:), Кух(т:}-авто- и взаимцокорреляционная функция входного и выходного сигналов.
Статический коэффициент усиления К можно определить из выражения
UU
СО
IKA-).
Так как Ку(т) О за время, равное интервалу корреляции ( ),
со
I 1Гакс У-()
к
LAJ
,/:(т)й.
Г
Отсюда видно, что, подавая на интеграторы в течение времени сигналы, пропорциональные взаимнокорреляционной и автокорреляционной функциям, и определяя отнощение их выходных сигналов, можно получить значение статического коэффициента усиления. При этом можно также определить статический коэффициент усиления для системы с переменными параметрами, время изменения которых соизмеримо с интервалом корреляции взаимной корреляционной функции.
Длительность интегрирования определяется коррелированностью выходного и входного сигналов (величиной 1;макс), а применимость формулы для нестационарных объектов зависит от скорости изменения параметров системы,-v.
ieS:
Входной x(t) и соответствующий ему выходной y(t) сигналы объекта / поступают на входы корреляторов 2 и 3, вычисляющих соответственно многоточечные авто- и взаимнокорреляционную функции. Сигналы, соответствующие текущим значениям корреляционных функций, поступают на интеграторы 4 и 5. Результаты интегрирования подаются на блок деления 6, определяющий их отношение, соответствующее статическому коэффициенту усиления.
Вычисленное значение коэффициента усиления подается в устройство 7 формирования сигнала подстройки, которое сравнивает его с требуемым (последнее может задаваться и по программе) и вырабатывает в.соответствии с принятым критерием (например, в смысле
минимума среднеквадратической погрешности отклонения регулируемой величины от требуемого значения) сигнал ошибки z(t), подаваемый на исполнительное устройство 9 - блок подстройки параметров объекта. Статический
коэффициент усиления можно контролировать и визуально. Исполнительное устройство 9 настраивает объект в соответствии с величиной и знаком сигнала ошибки z(t).
Предмет изобретения
Устройство для стабилизации статического коэффициента усиления динамического звена,
содержащее сравнивающее устройство с исполнительным механизмом, изменяющим коэффициент усиления звена, задатчик требуемого коэффициента усиления, подключенный к одному из входов сравнивающего устройства, ко
второму входу которого подключен блок деления с двумя входами, подсоединенными к выходам интеграторов, отличающееся тем, что, с целью обеспечения постоянства заданного значения коэффициента усиления динамического звена в непрерывном режиме его работы, в нем установлены два многоточечных .коррелятора, каледый с подключенными последовательно ко входному зажиму интегратором, перемножителем, запоминающим устройством и
дифференциатором, .причем выходные зажимы обоих дифференциаторов подключены ко входам соответствующих интеграторов, входной зажим интегратора первого коррелятора подключен ко входу динамического звена и ко
вторым входам обоих перемножителей, а выход динамического звена подключен ко входному второго коррелятора. 
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАТИЧЕСКИМ КОЭФФИЦИЕНТОМ УСИЛЕНИЯ ДИНАМИЧЕСКОГО ЗВЕНА | 1968 |
|
SU208796A1 |
| Устройство для определения динамичес-КиХ ХАРАКТЕРиСТиК | 1979 |
|
SU842723A1 |
| Устройство адаптивного управления процессом помола | 1981 |
|
SU1021470A1 |
| КОМПЕНСАТОР ПОМЕХ | 1985 |
|
SU1841064A1 |
| АВТОМАТИЧЕСКИЙ КОМПЕНСАТОР | 1983 |
|
SU1840994A1 |
| ПАРАМЕТРИЧЕСКИЙ СИНТЕЗАТОР | 1970 |
|
SU265218A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2418964C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Способ обнаружения и идентификации взрывчатых и наркотических веществ и устройство для его осуществления | 2019 |
|
RU2723987C1 |
| Коррелометр с аппроксимацией ортогональными функциями Лагерра | 1984 |
|
SU1198547A1 |