Изобретение относится к самонастраивающимся системам управления и может быть использовано.для автоматизации нестационарных технологических процессов, параметры которых изменяются в широком диапазоне при эксплуатации или изменении нагрузки, в частности для управления теплоэнергетических процессов котлоагрегатов и энергоблоков.
Цель изобретения - расширение области применения и повышения быстродействия .
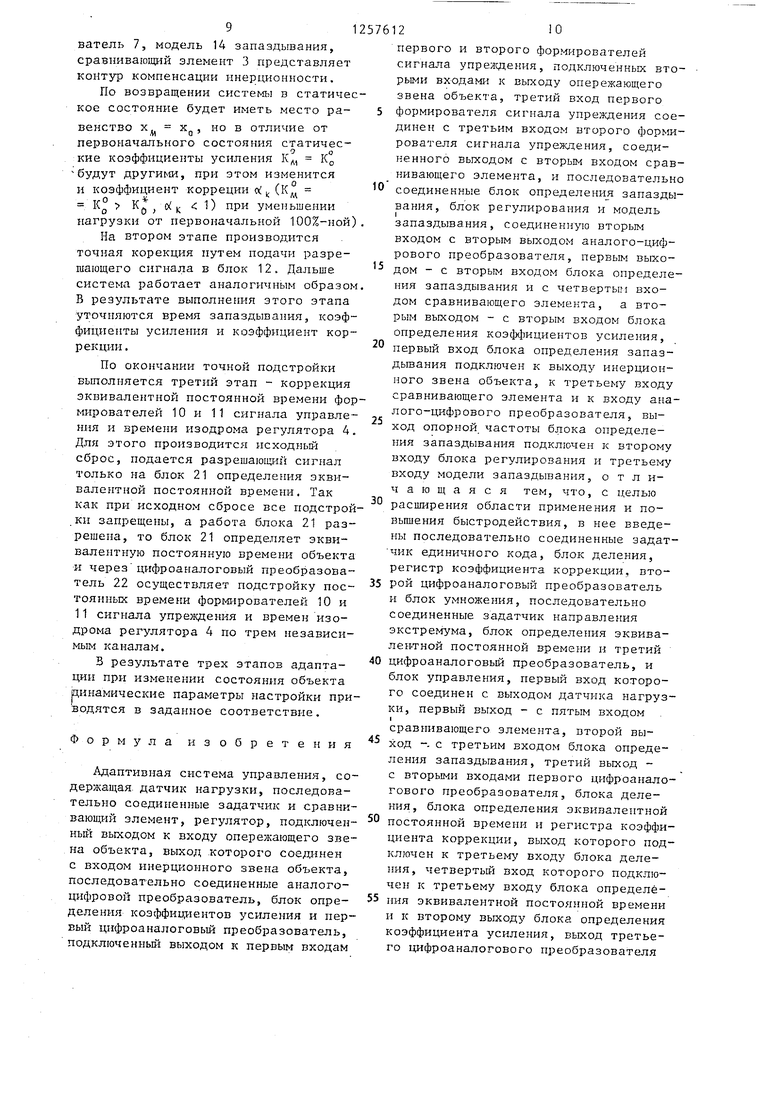
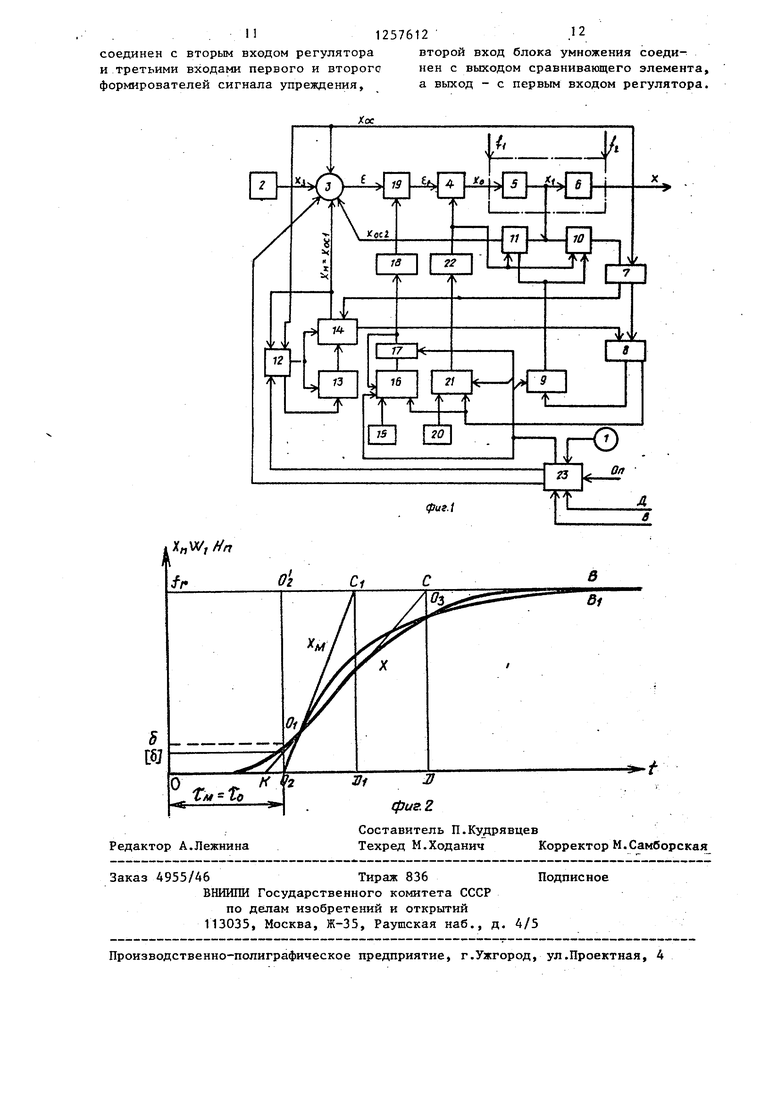
На фиг. 1 показана структурная схема адаптивной системы управления для объектов с переменными параметрами; на фиг. 2 - графики, поясняющие принцип работы системы.
Система содержит датчик 1 нагрузки, задатчик 2, сравнивающий элемент 3, регулятор 4, опережающее звено 5 объекта, инерционное звено 6 объекта, аналого-цифровой преобразователь 7, блок 8 определения коэффициентов усиления, первый цифроанало- говый преобразователь 9, первый и второй формирователи 10 и 11 сигнала упреждения (упредители), блок 12 определения запаздывания, блок 13 регули- рования, модель 14 запаздывания, задатчик 15 единичного кода, блок 16 деления, регистр 17 коэффициента коррекции, второй цифроаналоговьш преобразователь 18, блок 19 умножения,.задатчик 20 направления экстремума, блок 21 определения эквивалентной постоянной времени, третий цифроаналого- вый преобразователь 22 и блок 23 управления .
I
и fj
На фиг. 1 и 2 обозначены: f, внутренние и внешние возмущенияi On - операторi х - возмущение заданием В - ошибка рассогласованияj ошибка управления (регулирования); х, и X - промежуточная и основная регули- руемые величины-, х,, Хд., и х,, соответственно сигналы основной обратной связи, компенсации инерционности и упреждения запаздывания, Хд, х.- сигнал с выхода полной модели объекта
Блок 8 определения коэс1)фициентов усиления служит для нахождения в каждый момент времени квантования Tj (где i 1,2,3,...,m) текущих значений коэффициентов усиления формирователей 10 и 11. Информационный выход блока 8 определения коэффициентов усиления соединен с входом
5
0
5
первого цифроаналогового преобразователя 9 (ЦА111), а также с четвертым и третьими входами соответственно блока 16 деления и блока 21 определения эквивалентной постоянной времени.
Первый и второй формирователи 10 и 1 1 сигнала упреждения предназначены для моделирования объекта согласно выбранной аппроксимирующей передаточной функи ии объекта. В аналоговом исполнении формирователи- 10 и 11 реализуются, например, как одно усилительное звено с переменным коэффициентом усиления.
Блок 12 определения запаздывания служит для определения величины времени запаздывания.
Задатчик 15 единичного кода используется для задания и хранения кода, условно принятого в данной системе за единицу. Он может быть выполнен, например, в виде набора тумблеров или кнопок.
Блок 16 деления предназначен для определения коэффициента коррекции по формуле
с(Т: ) с
fT
- 7 X ГтП I
(1)
где , - коэффициент коррекции коэффициента усиления регулятора 4 в цифровом виде. Из формулы (1) видно, что коэффи- циент коррекции, а значит, и коэффициент усиления регулятора 4 изменяются обратно пропорционально изменению коэффициента усиления упредителей 10 и 1.1.
Блок. 21 определения постоянной времени предназначен для определения кода эквивалентной постоянной времени звена 6 и передачи его в третий циф- роаналоговый преобразователь 22. Блок 21 реализует формулу
Т, (Ч,,) N„(4,)
8
(2)
Т и Т,
t. и t
itf
эквивалентные постоянные времени модели и объекта соответственно, предьщущий и очередной
циклы адаптации,причем . э
д ;2 ГО
(3)
-Kg - экстремальный динамический
коэффициент отношения выходных сигналов объекта и модели объекта:
к ) )
fmin max
(4)
1 - К - порядковый помер цикла -1 измерения, при котором
отношение принимает экстремальное значение. Если вычисляется отношение выходного сигнала объекта к выходному синалу модели объекта, а не наоборот, и если надо получить переходный процесс в замкнутой системе с постоянной времени, меньшей чем эквивалентная постоянная времени объекта, то в этом случае К min.
В основу построения адаптивной системы управления для объектов с переменньи- И параметрами положен прицип упрелодения запаздывания и компенсации инерционности при непрерывной адаптивной подстройке коэффициентов усиления модели объекта и коэффициента коррекции, коэффициента усиления регулятора с периодической адаптивной подстройкой времени запаздывания и эквивалентной постоянной времени модели объекта и времени изод- рома регулятора.
Принцип работы системы поясняют графики, показанные на фиг. 2, где x(t) - X - переходная характеристика замкнутой системы управления при подаче на вход единичного калиброванного сигнала h(t) h, а x,(t) х, переходная характеристика на выходе модели. Кривая х обозначена через 00, АВ, а кривая х через ,; Sj -.некоторое заданное пороговое значение или допустимая зона регулирования, обусловленная: чувствительностью реальной регулирующей аппаратуры; 8, - измененное значение заданного порогового значения (&t 8 ); tf, - запаздывание объекта - запаздывание модели объекта. На фиг.2 показан случай, когда д;,
Теплоэнергетические 1эбъекты являются сложными объектами и в общем случае могут быть промоделигзованы передаточной функцией вида
,
(5)
Клб
тт О тт
- XUTj 0
WQ - передаточная функция объекта, причём Wg W(j(p) для упрощения,
Т - постоянная времени инерционного звена первого порядка;
2576124
n - показатель степениJ
10
15
20
25
30
35
40
45
50
55
W - передаточная функция объекта без запаздывания. Моделирование объекта в виде (5) приводит к сложным поисковым алгоритмам, которые обладают потерей времени на поиск и требуют использования мощных средств вычислительной техники .
- При использований адаптивных алгоритмов могут использоваться упрощенные модели, например
/
Кие , -р м ,,.
I- нтГр- -
, Кд,, Тд, - соответственно время запаздывания, коэффициент усиления и эквивалентная постоянная времени
модели объекта:
W - передаточная функция модели без запаздывания.
Для упреждения запаздывания н компенсации инерционности должны выполняться условия:
(7)
0 f - J.
Применительно к схеме, изображенной на фиг. 1, условие (7) можно записать следующим образом: %, Wynj W ,
- -
0-
М
Из (8) следует:
V - V - V иП( - О
УП( Jl z /X .„Л.
(8)
(9) (10)
т« Т,.
(11)
Известно, что если условия (9-11) выполняются, то система управления может работать с максимальным быстродействием, как если бы она не имела запаздывания. В этом случае динамические параметры настройки системы управления могут быть рассчитаны с помощью любого известного метода для систем управления без запаздывания, например с помощью метода ком- пенст-фованной настройки, при котором, в частности, для ПИ-закона управления время изодрома (постоянная,интегрирования ошибки управления) Т„ равна эквивалентной постоянной времени объекта , а коэффидаент усиления регулятора Кр с точностью до постоянной С - обратно пропорционален коэффициенту усиления объекта К, т.е. Т Т„. (12)
К Ко
(13)
s
Условия (12) и (13) соответствуют мннимy ry среднеквадратичной оппгб- ки управления.
Потребуем, чтобы передаточная функция замкнутой системы имела вид
.с.
Wj.|Wo 1+WyW
w
чл.
(14)
где W, - передаточная функция эталонного процесса замкнутой системы управления, причем
W,.T. Из (14)
1
Т,.р
W,,
пг имеем
W
1
де
Т S
L
w;(T - w,;)
т
ь
- о ; То
КоТ,г
(15)
(16) (17) (18)
Сопоставим (17) и венио с (12) и (13),
(18) соответстКрК.
С -2-Т -iv
(19)
Постоянная С в формуле (19) определяет первоначальное заданное (выбранное) произведение коэффициента усиления объекта и пропорциональной составляющей управляющего воздейст- ВИЯ, которые соответствуют определенному к зитерию качества, в частности ютнимуму среднеквадратичной ошибки управления при требуемом быстродей ствии с учетом ограничения управляю- щего воздействия, например, на перемещение регулирующего клапана.
Уравнения .(П). О8) и (19) требуют, чтобы при любом состоянии объекта его точность и быстроде йствие сох ранялись и соответствовали точности и быстродействию при состоянии объекта, выбранном за первоначальное (например, при 100%-ной нагрузке) . В отличие от текущих зна- чений введем другие обозначения для параметров, которые имеют место при первоначальном состоянии объекта:
Т
о
Ку К С
1й
т
.
(20)
Проведенные рассуждения для объектов первого порядка оказываются справедливыми и для объектов более высокого порядка при использовании адаптивного алгоритма управления и выполнении условия упреждения за2576126
паэдывания и компенсации инерционности. В этом случае в выражении (17) должна учитываться эквивалентная постоянная объекта Т, . - Адапт1гвная система управления работает следурощим образом.
В исходном статическом состоянии (первоначальном) системой произведепоступающего
на отработка задания j с задатчика 2. Ошибка рассогласования с выхода сравнивающего элемента 3 сведена к нулю: 5 О, ошибка регулирования также равна нулю: 8р л О . Коэффициент усиления и время изодрома регулятора 4 установлены согласно формуле (21). В блоке 12 определения запаздывания хранится код времени за- паздыв ания модели 14, равный коду условного запаздывания объекта. В
модели 14 скорректировано время запаздывания по коду блока 12 через блок 13 регулирования. Аналого-цифровой преобразователь 7 работает непрерывно с частотой f 1/Т, где Т период квантования или цикла измерения и адаптации.
о
о
На третьем входе блока 12 определения запаздывания и на втором входе блока 21 определения эквивалентной постоянной времени находятся запрещающие сигналы соответственно на измерение условного времени запаздывания и на занесение кода эквивалентной постоянной времени моделей объекта. На вторых входах первого цифро- аналогового преобразователя 9 и блока 16 деления присутствуют разрешающие сигналы, разрешающие соответст- вен но подстройку коэффициентов усиления формирователей сигнала 10 и 11 упреждения и коэффициента коррекции сс . Блок 8 определения коэффициентов хранит код формирователей 10
и 11, равньш коэффициенту усиления
объекта в статике;
9
К
Во вто0
5
ром цифроаналоговом преобразователе 18 установлен код коэффициента коррекции ci , который в статике при первоначальном состоянии объекта (например, при 100%-ной нагрузке) равен единице. В задатчике 20 направления экстремума установлен код, указывающий направление движения к экстремуму, в частности к мимнимуму. так как при изменении нагрузки в сторону уменьшения при выравнен5 ьгх коэффициентах усиления объекта и модели кривая переходного процесса
12
системы будет лежать ниже кривой эталонного переходного процесса (в частности, при 100%-ной нагрузке). В за- датчике 20 установлен код допус - тимого значения экстремального дина- мического отношения выходных сигналов объекта и модели.
Рассмотрим работу системы, когда характеристики объекта в какой-то момент времени изменились, что харак- терно для теплоэнергетических объектов, работаюищх при переменных нагрузках.
При изменении нагрузки в блок 23 управления поступают сигналы. Сигна- лы-преобразуются в блоке 23, индиди- руя оператору изменение нагрузки.
В этом случае возможны два режима работы системы, которые могут быть заданы оператором (Оп): с адап- тивной подстройкой динамических параметров путем грубой коррекции в продес- i се перехода с нагрузки на нагрузку с Тюследующей точной коррекцией и без подстройки по ходу процесса: т.е. при параметрах настройки, соответствующих предьщущей нагрузке, но с последующей точной коррекдией. В первом случае переход на другую нагрузку ближе к оптимальному является пред- почтительным, хотя и имеются небольшие потери качества переходного процесса он предпочтителен при плавном, например, 10%-ном изменении нагрузки Так как изменение нагрузки во избежа- ние усталости металла из-за температурных напряжений производится плавно в течение заданного интервала времени, то ограничится рассмотрением первого режима работы. К тому же вто- рой режим работы - второй этап первого режима.
Таким образом, сигнал изменения нагрузки запрещает все адаптивные подстройки, кроме подстройки времени запаздывания. Поэтому разрешаю1дий сигнал подается только в блок 12 определения времени запаздывания при появлении индикации об изменении нагрузки . Изменение нагрузки является параметрическим возмущением и стремится изменить выходную величину X , так как оно действует через определенную передаточную функцию (как правило, первого порядка) и приклады- вается одновременно как к выходу системы, так и к ее входу через отрицатльную обратную связь, т.е. со стороны
5
0 0 5 0
5
5
0 55
входа действует аналогично изменению задания, но с противоположным знаком. Однако пороговое значение 5 , используемое при работе блока 12 определения запаздывания, выбирается равным зоне нечувствительности регулятора и зависит как от аппаратуры регулирования, так и от величины возмущения. Величина зоны S1 выбирается из условия единичного калиброванного скачка, а не любого произвольного. Поэтому использование зоны 8 при другом скачке будет вносить некоторую погрешность, что приведет к грубой подстройке. При 10%-ном изменении нагрузки для выполнения равенства XQJ, Хд,,, неточность за счет грубого измерения времени запаздывания будет компенсироваться за счет других коррекций (в частности, адаптивных подстроек коэффициентов усиления упре- дителей 10 и 11 и коэффициента коррекции d. ,}, но при этом грубая коррекция ведет к некоторой потере качества регулирования. Что касается зависимости 8 от вида регулирующей аппаратуры, то она легко -устра- . няется при реализации блока 12 определения запаздывания. Таким образом, в результате адаптивной подстройки времени запаздывания осуществляется грубая коррекция времени за- паздьшания в модели 14 через блок 13 регулирования. По окончании подстройки времени запаздывания блок 12 вырабатывает сигнал Б блок.23 управления, который формирует разрешающий сигнал в первый цифроаналоговый преобразователь 9, блок 16 деления и регистр 17 коррекции, при этом производится адаптивная подстройка.
Отработка возмущения f осуществляется по трем контурам регулирования: 1) основная обратная связь - сравнивающий элемент 3, блок 19 умножения, регулятор 4, опережающее звено 5, второй формирователь 11, сравнивающий элемент 3 - представляют контур упрежденпя; 2) основпая обратная связь, сравнивающш элемент 3, блок 19 умножения, регулятор А, звенья 5 и 6 объекта основная обратная связь представляют основной контур регулирования; 3) обратная связь - сравниваюхщш элемент 3, блок 19 5 множения, регулятор 4, звенья 5 и 6 объекта, первый формирователь 10, аналого-цифровой прсобразо10
15
20
9125761
атель 7, модель 14 запаздывания, равпивагощий элемент 3 представляет онтур компенсации инерционности.
По возвращении системы в статичесое состояние будет иметь место ра- 5 енство х Хд, но в отличие от ервоначального состояния статичесие коэффициенты усиления К, KQ удут другими, при этом изменится коэффициент корреции о(. , (К, К° К(Хк 1) при уменьшении нагрузки от первоначальной 100%-ной).
На втором этапе производится точная корекция путем подачи разрешающего сигнала в блок 12. Дальше система работает аналогичным образом. В результате выполнения этого этапа уточняются время запаздывания, коэффициенты усиления и коэффициент коррекции.
По окончании точной подстройки выполняется третий этап - коррекция эквивалентной постоянной времени формирователей 10 и 11 сигнала управле- 25 ния и времени изодрома регулятора А. Для этого производится исходный сброс, подается разреша1оц: й сигнал только на блок 21 определегшя эквивалентной постоянной времени. Так как при Р1сходном сбросе все подстрой- ки запрещены, а работа блока 21 разрешена, то блок 21 определяет эквивалентную постоянную времени объекта и через цифроаналоговый преобразователь 22 осуществляет подстройку пос- тоянньк времени формирователей 10 и 11 сигнала упреждения и времен изодрома регулятора 4 по трем независимым каналам.
В результате трех этапов адаптации при изменении состояния объекта динамические параметры настройки приводятся в заданное соответствие.
Формула изобретения
Адаптивная система управления, содержащая- датчик нагрузки, последовательно соединенные задатчик и сравнисп
вающии элемент, регулятор, подключен- ньй выходом к входу опережающего звена объекта, выход .которого соед1- нен с входом инерционного звена объекта, последовательно соединенные аналого- цифровой преобразователь, блок опре- 5 деления коэффициентов усиления и пер- Ebui цифроаналоговый преобразователь, подключенньп выходом к первым входам
30
0
5
20
61
5
25
сп
5
30
210
первого и второго формирователей сигнала упреяодения, подключенных вторыми входами к выходу опережающего звена объекта, третий вход первого формирователя сигнала упреждения соединен с третьим входом второго формирователя сигнала упреждения, соединенного выходом с вторым входом сравнивающего элемента, и последовательно соединенные блок определени я запаздывания, блок регулирования и модель запаздывания, соединенную вторым входом с вторым выходом аналого-цифрового преобразователя, первым выходом - с вторым входом блока определения запаздывания и с четвертым входом сравнивающего элемента, а вторым выходом - с вторым входом блока определения коэффициентов усиления, первый вход блока определения запаз- дьшания подключен к выходу инерционного звена объекта, к третьему входу сравнивающего элемента и к входу аналого-цифрового преобразователя, выход опорной частоты блока определения запаздывания подключен к второму входу блока регулирования и третье 1у входу модели запаздывания, отличающаяся тем, что, с целью расширения области применения и повышения быстродействия, в нее введены последовательно соединенные задатчик единичного кода, блок деления, регистр коэффициента коррекции, второй цифроаналоговый преобразователь и блок умножения, последовательно соединенные задатчик направления экстремума, блок определения эквивалентной постоянной времени и третий цифроаналоговый преобразователь, и блок управления, первый вход которого соединен с выходом датчика нагрузки, первый выход - с пятым входом .
сравнивающего элемента, второй выход -- с третьим входом блока определения запаздывания, третий выход - с вторыми входами первого цифроанало- гового преобразователя, блока деления, блока определения эквивалентной постоянной времени и регистра коэффициента коррекции, выход которого подключен к третьему входу блока деления, четвертый вход которого подключен к третьему входу блока определения эквивалентной постоянной времени и к второму выходу блока определения коэффициента усиления, выход третьего цифроаналогового преобразователя
и третьими входами первого и второго формирователей сигнала упреждения.
нен с выходом сравнивающего элемента, а выход - с первым входом регулятора.
Хое
Редактор А.Лежнина
Заказ 4955/46Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Составитель П.Кудрявцев
Техред М.Ходанич Корректор М.Самборская
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Адаптивная система управления | 1983 |
|
SU1174902A1 |
| Система управления для объектов с запаздыванием | 1982 |
|
SU1070506A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Адаптивная система управления для объектов с запаздыванием | 1983 |
|
SU1161917A1 |
| Адаптивная система управления для объектов с запаздыванием | 1989 |
|
SU1689920A1 |
| Устройство адаптации | 1979 |
|
SU813358A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
Изобретение относится к само- настрива.ющимся системам управления и может быть,в частности, использовано для управления теплоэнергетическими объектами. Цель изобретения - расширение области применения и повышение быстродействия. Система содержит три основных контура управления. Первый контур управления (основная обратная связь) содержит сравнивающий элемент, блок умножения, регулятор, опережающее звено объекта и второй упредитель. Первый контур является контуром упреждения. Второй контур управления включает в свой состав, кроме основной обратной связи, следующую цепь: сравнивающий элемент, блок умножения, регулятор, опережающее и инерционное звенья объекта. Третий контур (контур компенсации инерционности) содержит сравнивающий элемент, блок умножения, регулятор, опережающее и инерционное звенья объекта, первый упредитель, аналого- цифровой преобразователь и модель запаздывания . Система позволяет осуществлять управление объектами с переменными параметрами, в том числе с переменным запаздыванием. 2 ил. (Л С ел ГС
| Адаптивная система управления для объектов с запаздыванием | 1980 |
|
SU1015336A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Адаптивная система управления | 1983 |
|
SU1174902A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
