Р1зобретение касается устройств для имитации аэродинамических нагрузок при исследовании силовых приводов органов управления летательными аппаратами.
Известны имитаторы, содержащие исследуемый привод, закрепленный к неподвижной части имитатора упругой связью, механизм передачи, соединенный с этим механизмом упругой связью следящий нагрузочный привод, устройства для имитации проводки и органа управлени} летательным аппаратом и счетнорешающее устройство, не обеспечивают раздельной, одновременной и взаимонезависнмой имитации отдельных составляющих аэродинамической нагрузки, в частности раздельно ее составляющих по углу отклонения органа управления и по углу атаки.
Целью изобретения является устранение этого недостатка.
Сущность изобретения состоит в том, что имитатор снабжен вторым следящим нагрузочным приводом, а механизм передачи выполнен дифференциальным в виде двуплечей качалки, к одному из концов которой шарннрно присоединена тяга от исследуемого привода, к средней части качалки шарнирно присоединена тяга от первого нагрузочного привода, а к другому концу качалкн шарннрно присоединены второй нагрузочный привод и рычаг, своим вторым концом шарнирно закрепленный
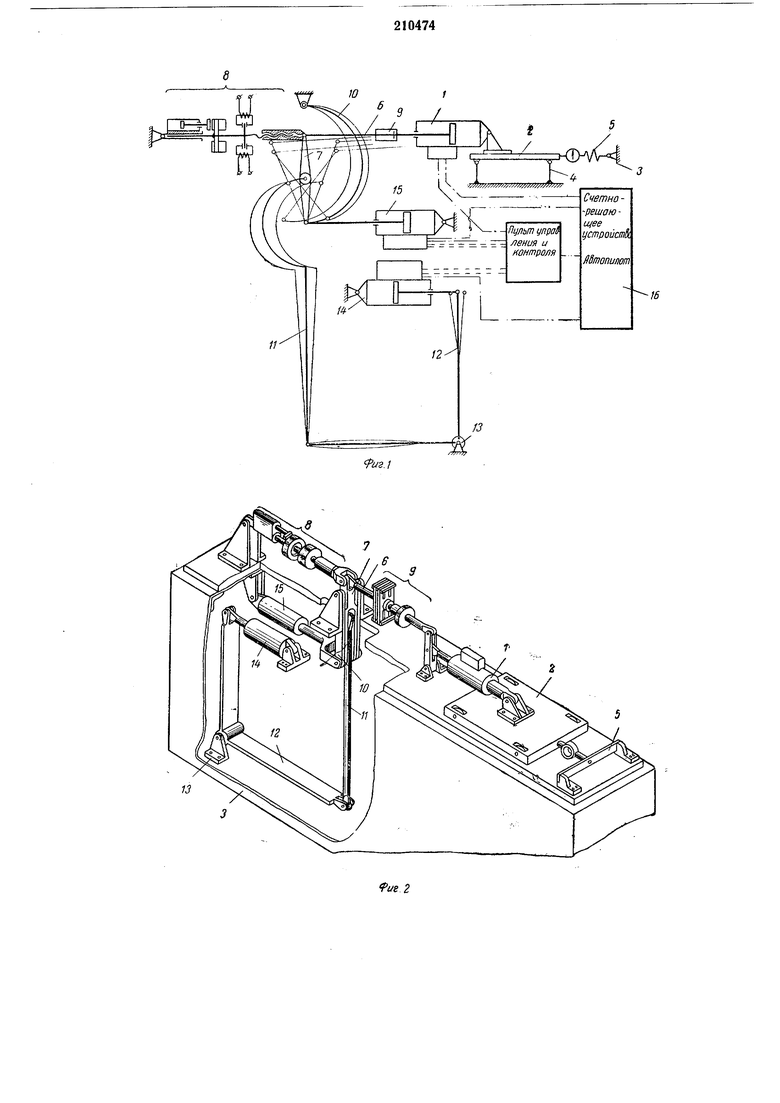
на неподвижной части имитатора. Этот рычаг и тяга от первого нагрузочного привода расположены параллельно качалке в ее среднем положении и направлены от места закреплення их к последней, рычаг - в сторону противоположного конца качалки, а тяга - в сторону конца качалки, к которому присоединен упомянутый рычаг. На фиг. 1 показана схема предлагаемого
имнтатора; на фиг. 2 - то же, общий вид.
Р1сследуемый привод / закреплен на платформе 2, соединенной с неподвижной частью (станиной) 5 упругими связями 4 и 5, и тягой 6 соединен с качалкой 7 механизма передачи. К этому же концу качалки 7 присоединено устройство 8, имитирующее характеристики инерции, трения и демпфирования органа управления летательным аппаратом.
На тяге 6 может быть установлено устройство 9, имитирующее характеристики жесткости инерции, люфта и трения проводки управления. Противоположный конец качалки 7 рычагом 10 соединен со станиной 3. С средней частью качалки 7 тягой 11 и упругой связью 12,
выполненной в виде двуплечей качалки с упругими плечами, шарннрно установленной на опоре 13, соединен следящий нагрузочный привод 14. Второй следящий нагрузочный привод 15
воды 1, 14 и 15 управляются счетно-решающим устройством 16 в соответствии с уравнениями движения летательного аппарата, причем привод 14 используется для имитации соста,вйяющей аэродинамической нагрузки, зависящей только ОТ угла отклонения органа управления, а привод /5 - для т.удтзиии составляющей, зависящей только от угла атаки. Кинематика связей дифференциального механизма передачи, образованного качалкой 7, рычагом 10, тягами 6, 11 и штоком привода 15, обеспечивает одновременность и взаимонезависимость воздействий приводов 14 и 15 на исследуемый привод /.
Предмет изобретения
Имитатор аэродинамических нагрузок, предназначенный для исследования силовых приводов органов управления летательным аппаратом, содержащий исследуемый привод, закрепленный к неподвижной части имитатора посредством упругой связи, механизм передачи, соединенный с этим механизмом посредством упругой связи следящий нагрузочный
привод, устройства для имитации проводки и органа управления летательным аппаратом и счетно-решающее устройство, отличающийся тем, что, с целью одновременной и взаимонезависимой имитации составляющих аэродинамической нагрузки но углу отклонения органа управления и по углу атаки, он снабжен вторым следящим нагрузочным приводом, а механизм передачи выполнен дифференциальным
в виде двуплечей прямой качалки, к одному 43 концов которой шарнирно присоединена тяга от исследуемого привода, к средней части качалки шарнирно присоединена тяга от первого нагрузочного привода, а к другому концу
качалки шарнирно присоединены второй нагрузочный привод и рычаг, своим вторым концом шарнирно закрепленный на неподвижной части имитатора, причем этот рычаг и тяга от первого нагрузочного привода расположены
параллельно качалке в ее среднем положении и направлены от мест соединения их с последней, рычаг - в сторону противоположного конца качалки, а тяга - в сторону конца качалки, к которому присоединен упомянутый
рычаг.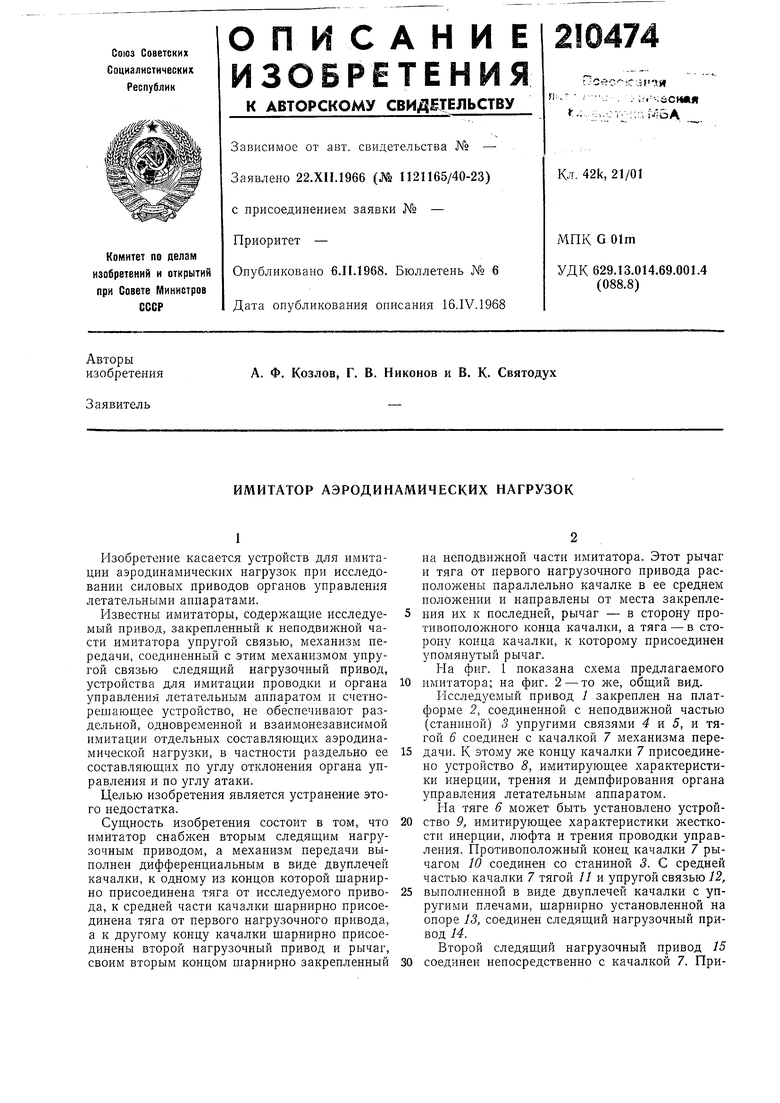

| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд нагрузочный для испытания рулевых приводов аэродинамических поверхностей летательного аппарата | 2023 |
|
RU2798624C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ СООСНОЙ СХЕМЫ | 2021 |
|
RU2763198C1 |
| ИМИТИРУЮЩЕЕ ВОЗДЕЙСТВИЕ | 1971 |
|
SU304474A1 |
| Устройство для имитации нагрузки приводов раскрытия трансформируемых конструкций космических аппаратов | 2023 |
|
RU2801954C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ДВУХСЕКЦИОННЫХ РУЛЕВЫХ ПОВЕРХНОСТЕЙ САМОЛЕТА | 1990 |
|
RU1762621C |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| Комбинированная динамически-подобная аэродинамическая модель для разных видов аэродинамических испытаний | 2023 |
|
RU2808290C1 |
| СТЕНД ДЛЯ УСКОРЕННЫХ ИСПЫТАНИЙ | 1972 |
|
SU330372A1 |
| СИСТЕМА РУЧНОГО УПРАВЛЕНИЯ САМОЛЕТА | 1994 |
|
RU2089447C1 |
| ЭЛЕКТРОГИДРОМЕХАНИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2191138C2 |