Изобретение относится к воздушным транспортным средствам, в частности к вертолетам, и может быть использовано в системе управления вертолетом соосной схемы с целью обеспечения управления вертолетом в продольном, поперечном, путевом каналах и по каналу общего шага.
В области систем управления вертолетов, обеспечивающих управление по четырем каналам, существует проблема, связанная с созданием компактной, быстросъемной, гибкой и технологичной системы управления. Эта проблема относится к вертолетам, конструкция фюзеляжа которых не имеет достаточных объемов для размещения большою количества узлов системы управления.
В качестве прототипа принято техническое решение, представленное в системе управления вертолетом Ка-226Т, которая состоит из рычагов управления, тяг управления, кронштейнов, гидромеханических приводов в каждом канале управления, и описанное в Руководстве по технической эксплуатации 226.52.0000.0000 РЭ, Управление винтами, раздел 67.00.00.
Известная система управления вертолета типа Ка-226Т по структуре и назначению аналогична системе управления, предлагаемой для патентования. Проблемными элементами известной системы управления являются жесткие тяги управления. Система управления Ка-226Т содержит рычаги управления вертолетом по соответствующим каналам управления, которые объединены в систему при помощи жестких тяг управления и кронштейнов с качалками.
Указанная система управления располагается под полом кабины экипажа, за шпангоутом кабины экипажа и через узлы с качалками, установленными на полу мотогондолы, подсоединяется тягами к четырехканальному комбинированному агрегату управления (далее КАУ). Силовые штоки КАУ через тяги и кронштейны с качалками связаны с автоматами перекоса системы у правления на колонке несущих винтов.
Система управления включает в себя командные рычаги, то есть рычаги продольно-поперечного управления (ППУ). рычаги управления общим шагом (РОШ) и недали, размещенные в кабине, которые через систему тяг, качалок и КАУ связаны с соответствующими рычагами и качалками колонки несущих винтов и рулей направления. КАУ предназначен для перемещения исполнительных рабочих органов системы управления (рычагов и качалок колонки несущих винтов и рулей направления) и снятия нагрузки с командных рычагов от несущих винтов.
В каналах продольного, поперечного и путевого управлений и управления общим шагом установлены датчики, регистрирующие отклонения командных органов управления, механизмы триммирования имитирующие и уравновешивающие аэродинамические нагрузки на ручке ПНУ и педалях, пружины уравновешивающие, которые исключают отклонение ручки ППУ и педалей от воздействия веса элементов системы управления.
Отклонение командных органов управления по каналам системы управления воздействует на лопасти несущих винтов и руль направления таким образом, что возникают неуравновешенные аэродинамические силы и моменты относительно трех осей вертолета - продольной X, поперечной X и вертикальной У. Эти неуравновешенные силы и моменты, воздействуя на вертолет, меняют его положение в пространстве, т.е. осуществляют управление. При отклонении ручки ППУ в продольном или поперечном направлениях соответственно наклоняются автоматы перекоса, что приводит к изменению силы, действующей вдоль поперечной оси X (движение вбок), и момента сил (момент крепа) относительно продольной оси X (правый или левый крен). При отклонении педалей дифференциально изменяется шаг несущих винтов и одновременно отклоняются рули направления, что вызывает момент сил (момент «рысканья») относительно вертикальной оси У (разворот вправо-влево). При отклонении рычага ОШ изменяется общий шаг несущих винтов и вызывает увеличение или уменьшение тяги винтов (движение вверх-вниз).
Недостатками описанной системы управления вертолета типа Ка-226Т является использование значительных объемов фюзеляжа под полом кабины экипажа и за кабиной экипажа из-за наличия большого количества узлов и соединений, что в результате осложняет компоновку смежных систем и агрегатов.
Причиной, препятствующей получению указанного ниже технического результата при использовании известной системы управления вертолета Ka-226Т, являются применение только жесткой проводки управления, установка которой возможна с использованием объемов фюзеляжа за кабиной, что усложняет компоновку других агрегатов вертолета. Для передачи управляющего воздействия от органов управления необходимо применять в конструкции промежуточные узлы управления, имеющие сложную конструкцию и требующие организации гермовыводов. То есть, выходящие из-под пола четыре жесткие тяги проходят через люки силового пола передней части мотогондолы и соединяются с качалками, установленными на силовом кронштейне, который установлен за этими люками. Люки имеют достаточно большие размеры для обеспечения свободного хода перемещения тяг. Для изоляции кабины экипажа от окружающей среды на люках пола м ото го долы установлены резиновые гермовыводы, что существенно затрудняет предполетный осмотр этой части управления. Кроме того, в фюзеляже за кабиной, для исключения воздействия веса тяг проводки управления, расположенных вертикально, установлены уравновешивающие пружины, которые также занимают определенное пространство и требуют выдерживать необходимые зазоры с агрегатами других систем. Проводка управления вертолета Ка-226Т под полом кабины экипажа занимает практически весь имеющийся объем, что не позволяет разместить узлы и агрегаты других систем, которые необходимо расположить в указанной зоне.
Предлагаемое техническое решение устраняет отмеченные недостатки.
Задачей изобретения является создание компактной системы управления, которая позволяет высвободить дополнительное пространство в фюзеляже за кабиной и под полом кабины экипажа.
Технический результат заключается в улучшении эксплуатационных характеристик за счет компактности элементов системы управления, освобождения полезного объема и улучшения эргономических характеристик в процессе наземного обслуживания.
Данный технический результат достигается тем. что система управления вертолета соосной схемы состоит из комбинированного агрегата управления и соединенных с ним каналов поперечного управления, продольного управления, управления общим шагом и путевого управления. Каждый капал управления содержит орган управления, триммерный и кинематический механизмы. Кроме тою. каналы управления размещены под полом кабины и соединены с комбинированным агрегатом управления посредством гибких тяг, которые закреплены па центральной балке остекления, жестко связанной с шпангоутом кабины вертолета.
Органы управления каналов поперечного и продольного управлений представляют собой общие командные рычаги управления, связанные с кинематическим механизмом соответствующего капала.
Орган управления канала общим шагом представляет собой систему командных рычагов общего шага, связанную с кинематическим механизмом канала управления общим шагом.
Орган управления канала путевого управления представляет собой систему педалей управления, связанную с кинематическим механизмом канала путевого управления.
Триммерный механизм каналов поперечного, продольного и путевого управления соединен с кинематическим механизмом соответствующего канала управления и содержит связанные между собой электромагнитный тормоз и нагрузочный механизм.
Кинематический механизм каждого канала соединен с отдельной гибкой тягой, и содержит систему связанных между собой жестких тяг и качалок.
Гибкая тяга каждого канала управления закреплена с двух сторон по длине центральной балки остекления хомутами и подсоединена при помощи муфт к качалке управления комбинированного агрегата управления.
Гибкие тяги позволили передать управляющее воздействие но каждому каналу управления до КАУ оптимальным образом через центральную балку остекления кабины, совместно с механической проводкой управления под полом кабины.
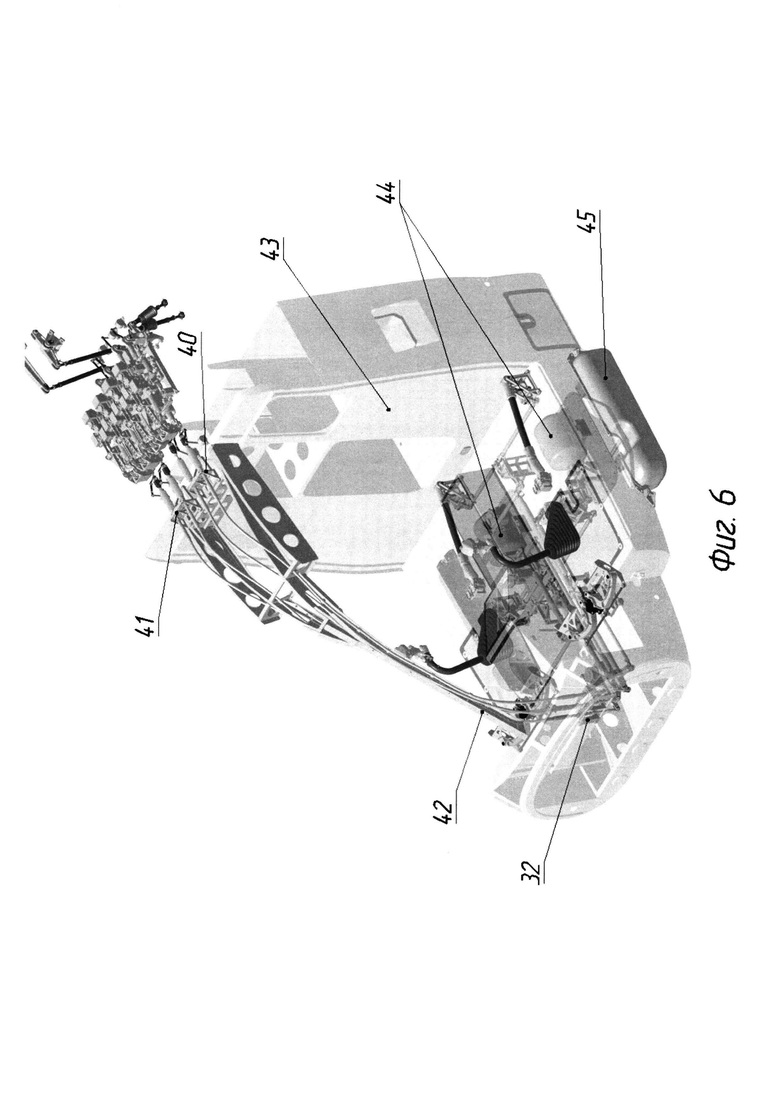
Система позволяет выполнять управление вертолетом по продольному, поперечному, путевому каналам управления и каналу управления общим шагом путем передачи управляющего воздействия на управляющую точку (качалку) комбинированного агрегата управления. Технический результат, получаемый при осуществлении изобретения, выражается в высвобождении полезных объемов за шпангоутом 43 (фиг. 6) кабины экипажа и под полом кабины экипажа, за счет применения гибких тяг управления, которые позволили передать управляющее воздействие по каждому каналу управления до КАУ оптимальным образом через центральную балку 42 (фиг. 6) остекления кабины.
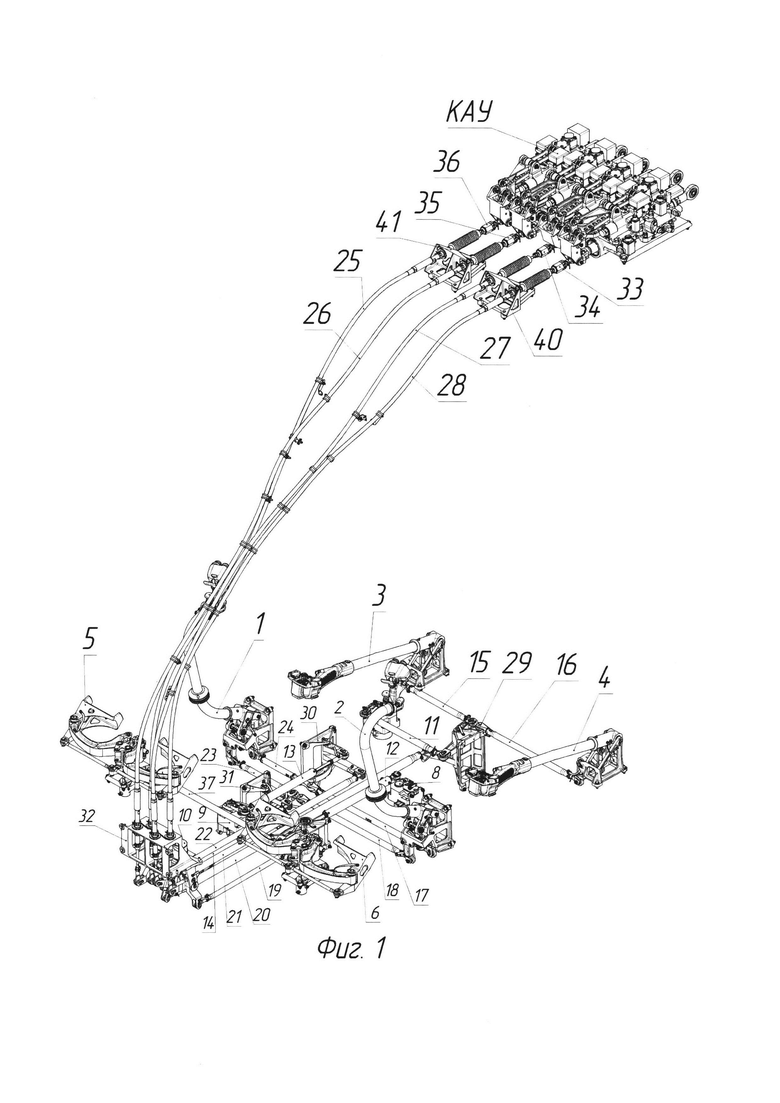
Причинно-следственные связи признаков изобретения с техническим результатом выражаются в следующем. Применение гибких тяг управления 25, 26, 27, 28 ((фиг. 1) позволили сконструировать проводку управления значительно компактнее, так как для прокладки гибких тяг было использовано пространство в центральной балке 42 (фиг. 6) остекления кабины, которое ранее использовать не представлялось возможным. За счет изменения направления передачи управляющего воздействия к КАУ потребовалось меньшее количество кронштейнов с качалками под полом кабины экипажа.
Работа предлагаемой системы управления вертолета поясняется следующими чертежами:
На фиг. 1 представлен общий вид системы управления.
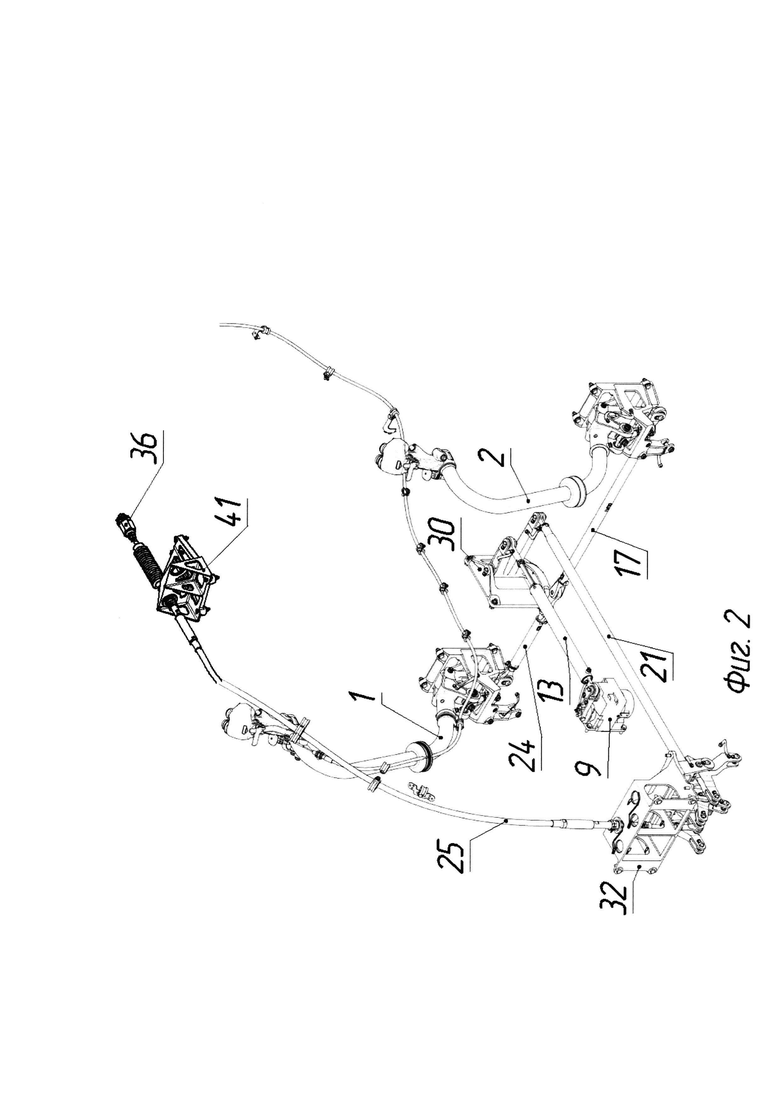
На фиг. 2 представлен канал поперечного управления.
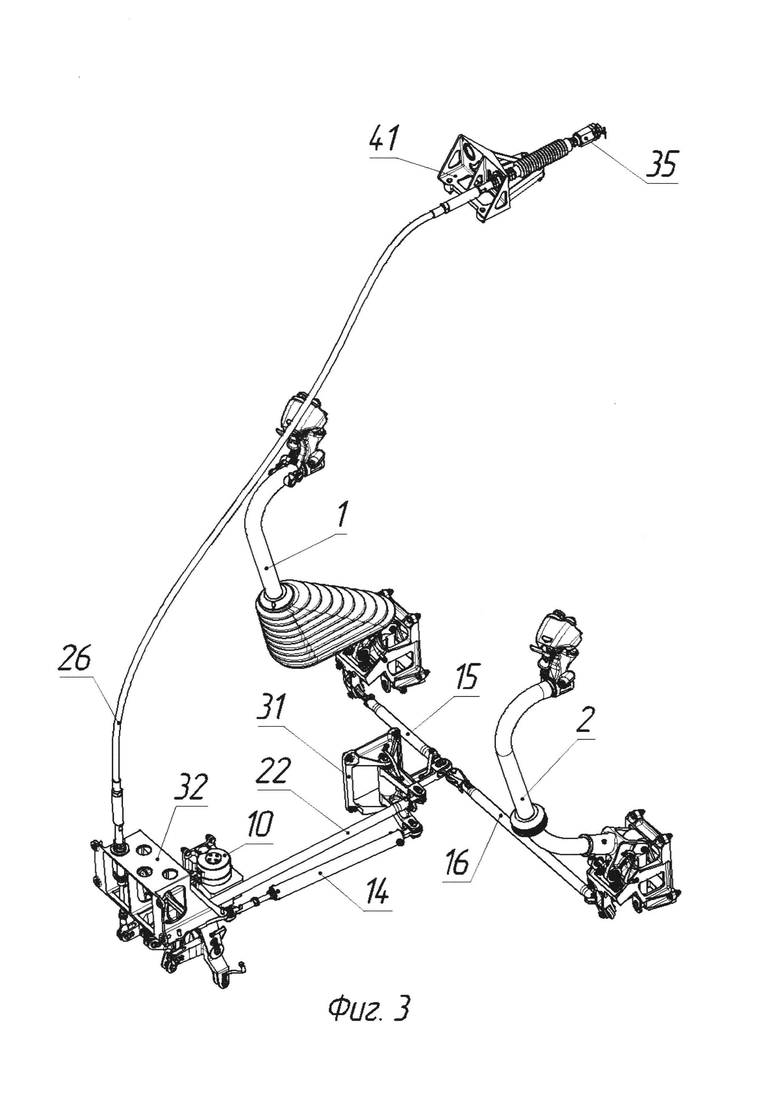
На фиг. 3 представлен канал продольного управления.
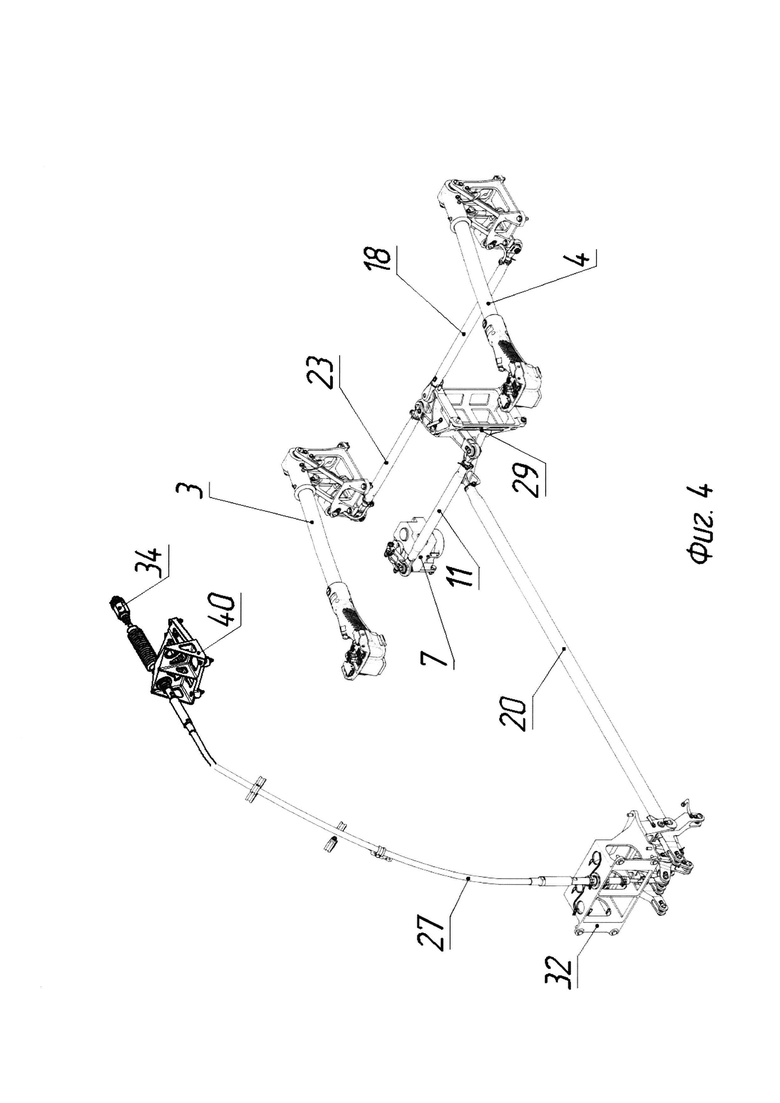
На фиг. 4 представлен канал управления общим шагом.
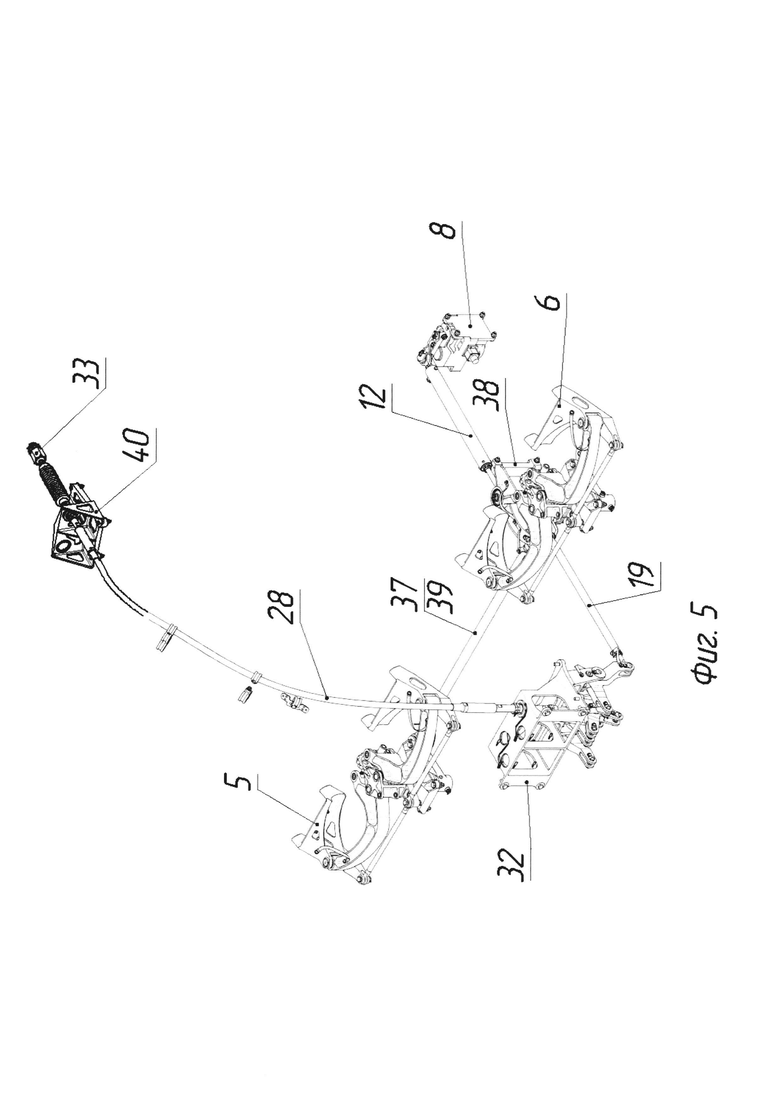
На фиг. 5 представлен капал путевого управления.
На фиг. 6 представлена компоновка системы управления в кабине.
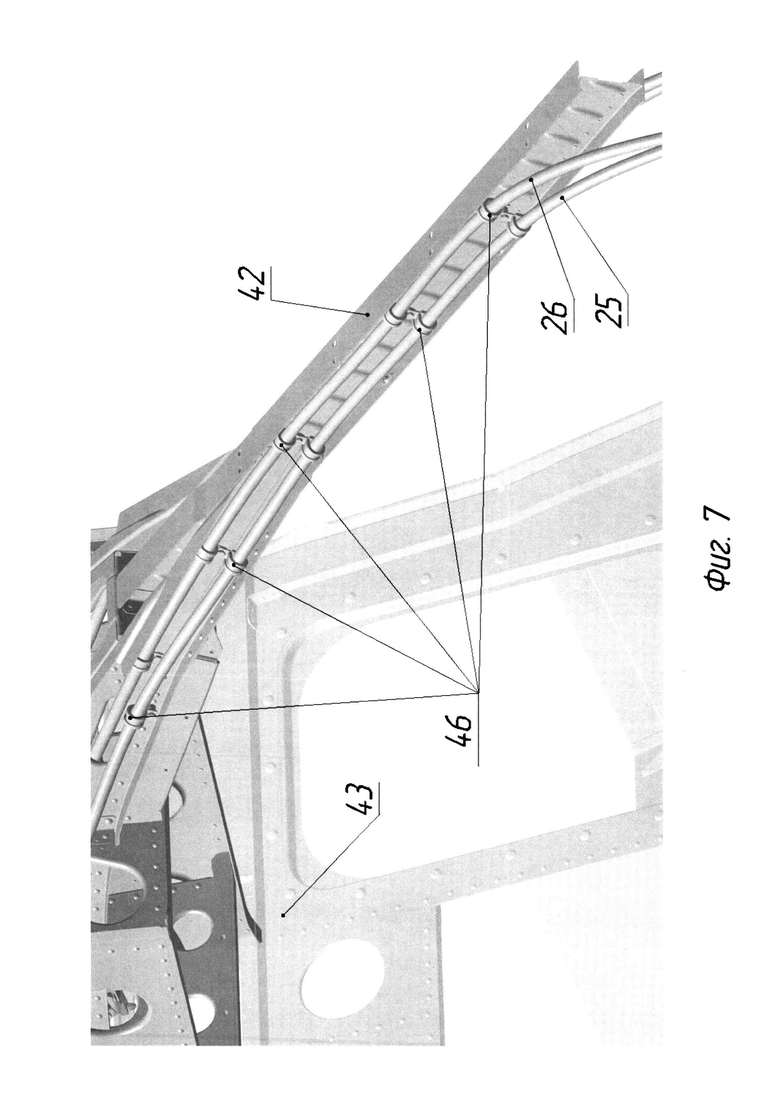
На фиг. 7 представлена центральная балка остекления кабины с хомутами крепления гибких тяг (правый борт).
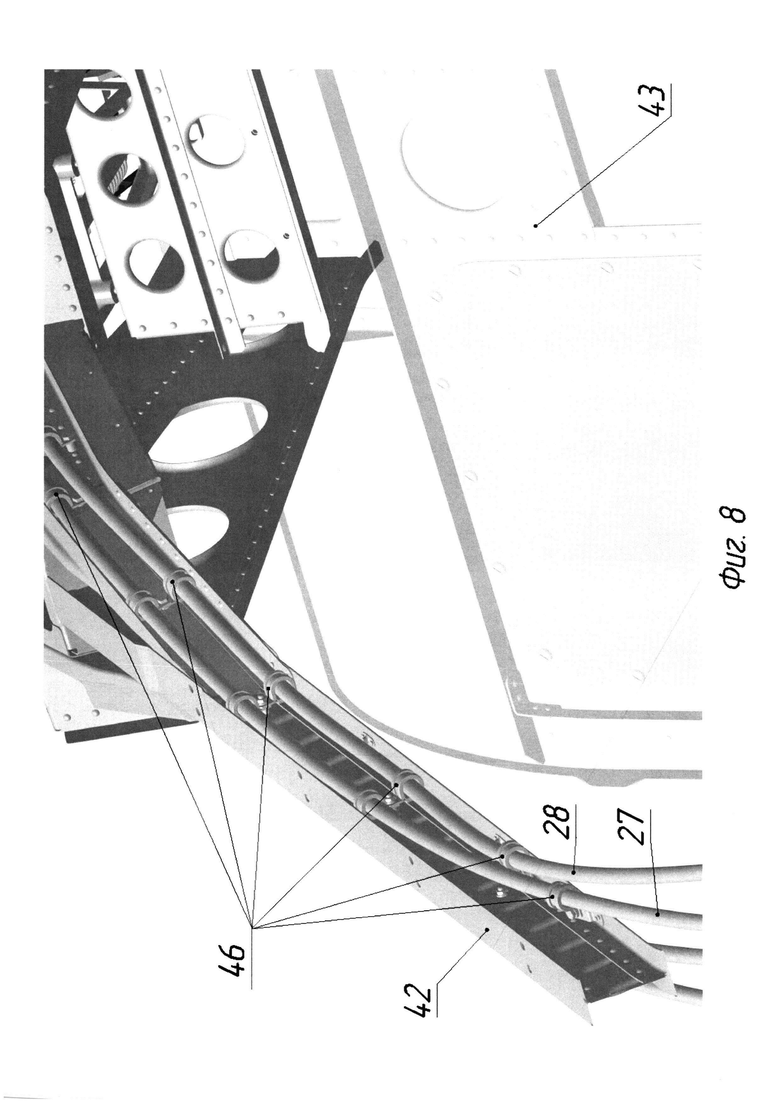
На фиг. 8 представлена центральная балка остекления кабины с хомутами крепления гибких тяг (левый борт).
Управление несущими винтами обеспечивается передачей командных сигналов от летчика на руль направления и лопасти несущего винта (несущий винт - далее НВ) и осуществляется работой следующих каналов управления:
- канала продольного управления (фиг. 3):
- канала поперечного управления (фиг. 2):
- канала путевого управления (управления по курсу) (фит. 5):
- капала управления общим шагом (по высоте) (фиг. 4).
Каждый канал управления содержит орган управления, триммерный и кинематический механизмы.
Работа предлагаемой системы управления заключается в передаче управляющего воздействия от органов управления через проводку управления (триммерный и кинематический механизмы) к качалкам КЛУ (на чертеже не обозначены).
Продольное управление воздействует на лопасти НВ, выпивая изменение направления аэродинамической силы тяги винтов по тангажу (на пикирование или на кабрирование).
Поперечное управление воздействует на лопасти НВ, изменяя направление аэродинамической силы тяг и винтов, создавая правый или левый крен вертолета.
Каналы продольного и поперечного управления, воздействующие на лопасти НВ, имеют общий орган управления - командный рычаг продольно-поперечного управления (далее ППУ). При продольном или поперечном отклонении рычага ППУ происходит наклон автоматов перекоса в соответствующем направлении. Это вызывает циклическое изменение шага лопастей НВ.
Путевое управление, воздействующее на лопасти несущих винтов и на рули направления, вызывает появление момента «рысканья» (на разворот вертолета вправо или влево). Командным органом путевого управления являются педали. При отклонении педалей дифференциально изменяется шаг НВ. при этом у всех лопастей одного НВ увеличивается угол установки, а у всех лопастей другого НВ угол установки соответственно уменьшается.
Командным органом в канале управления общим шагом НВ является рычаг общего шага (далее РОШ). При отклонении РОШ изменяется общий шаг НВ, при этом все лопасти несущих винтов одновременно и одинаково изменяют угол установки. Это приводит к изменению тяг и винтов.
Канал поперечного управления
Капал поперечного управления (фиг. 2) содержит органы управления, командные рычаги ППУ 1 и 2, триммерный механизм в составе электромагнитного тормоза 9. соединенного с механизмом нагрузочным 13 и кинематический механизм.
Кинематический механизм канала поперечного управления включает тяги 17 и 24 с качалкой кронштейна 30. выходная качалка которого через тягу 21 соединена с качалкой кронштейна 32. Выходная качалка кронштейна 32 соединена с наконечником гибкой тяги 25. наконечник которой закреплен на кронштейне 41 и через муфту 36 соединен с качалкой КАУ (на чертеже не обозначена).
При отклонении рычага ППУ в канале поперечного управления хвостовик рычага поворачиваясь на оси передает усилие (управляющее воздействие) через тяги 17 и 24 на качалку кронштейна 30, тягу 21, качалку кронштейна 32, гибкую тягу 25 и через соединительную муфту 36 к качалке КАУ (на чертеже не обозначена). Далее усилие передается через силовой шток КАУ на колонку несущих винтов.
Параллельно основной проводке управления поперечного канала качалка кронштейна 30 через нагрузочный механизм 13 соединена с электромагнитным тормозом 9.
Канал продольного управления.
Канал продольного управления (фиг. 3) содержит общие с каналом поперечного управления органы управления - командные рычаги ППУ 1 и 2, триммерный механизм в составе электромагнитного тормоза 10, соединенного с механизмом нагрузочным 14 и кинематический механизм.
Кинематический механизм канала продольного управления включает тяги 15 и 16 с качалкой кронштейна 31, выходная качалка которого через тягу 22 соединена с качалкой кронштейна 32. Выходная качалка кронштейна 32 соединена с наконечником гибкой тяги 26, наконечник которой закреплен па кронштейне 41 и через муфту 35 соединен с качалкой КАУ (на чертеже не обозначена).
При отклонении рычага ППУ в канале продольного управления хвостовик рычага, поворачиваясь на оси. передает усилие (управляющее воздействие) через тяги 15 и 16 по каналу продольного управления па качалку кронштейна 31, тягу 22, качалку кронштейна 32, гибкую тягу 26 и через соединительную муфту 35 к качалке КАУ (на чертеже не обозначена). Далее через силовой шток КАУ усилие передается на колонку несущих винтов.
Параллельно основной проводке управления продольного канала качалка кронштейна 31 через нагрузочный механизм 14 соединена с электромагнитным тормозом 10.
Канал управления общим шагом.
Канал управления общим шагом (фиг. 4) содержит органы управления - командные рычаги ОШ 3 и 4, триммерный механизм в составе электромагнитного тормоза 7, соединенного с тягой 11 и кинематический механизм.
Командные рычаги ОШ размещены в кабине экипажа слева от кресла каждого из членов экипажа.
Кинематический механизм канала управления общим шагом включает рычаги общего шага 3 и 4, которые установлены на полу кабины экипажа, связаны через тяги 18 и 23 с качалкой кронштейна 29, выходная качалка которого через тягу 20 соединена с качалкой кронштейна 32. Выходная качалка кронштейна 32 соединена с наконечником гибкой тяги 27, наконечник которой закреплен на кронштейне 40 и через муфту 34 соединен с качалкой КАУ (на чертеже не обозначена).
При отклонении рычага ОШ в канале управления общим шагом рычаг, поворачиваясь на оси. передает усилие (управляющее воздействие) через тяги 18 и 23 по каналу управления общим шагом на качалку кронштейна 29, тягу 20, качалку кронштейна 32, гибкую тягу 27 и, через соединительную муфту 34, к качалке КАУ (на чертеже не обозначена). Далее через силовой шток КАУ усилие передается на колонку несущих винтов.
Параллельно основной проводке управления канала общего шага качалка кронштейна 29 через тягу 11 соединена с электромагнитным тормозом 7.
Электромагнитный тормоз 7 с тягой 11, выполняющий функцию снятия фиксации РОШ при нажатой гашетке (на чертеже не обозначена), а также для фиксации РОШ в новом положении после отпускания гашетки, также создает па выходном валу противодействующий момент демпфирования.
Канал путевого управления (управление но курсу).
Канал путевого (по курсу) управления (фиг. 5) содержит органы управления - педали 5 и 6, триммерный механизм в составе электромагнитного тормоза 8, соединенного с механизмом нагрузочным 12 и кинематический механизм.
Кинематический механизм капал путевого управления содержит командные органы управления - педали путевого управления 5 и 6, которые связаны через тяги 37 и 39 с качалкой кронштейна 38. выходная качалка которого через тягу 19 соединена с качалкой кронштейна 32. Выходная качалка кронштейна 32 соединена с наконечником гибкой тяги 28, наконечник которой закреплен на кронштейне 40 и через муфту 33 соединена с качалкой КАУ (на чертеже не обозначена).
Педали через проушину наконечника тяги 39 шарнирно соединены между собой.
При отклонении педалей передается усилие (управляющее воздействие) через тяги 37 и 39 по каналу путевого управления на качалку кронштейна 38, тягу 19, качалку кронштейна 32, гибкую тягу 28 и через соединительную муфту 33 к качалке КАУ. Далее через силовой шток КАУ усилие передается па колонку несущих винтов и через кронштейн с качалкой, гибкую тягу, установленную в левой хвостовой балке, кронштейны с качалками и жесткие тяги, установленные в стабилизаторе, усилие передается на рули направления (на чертеже не показаны).
Параллельно основной проводке управления путевого каната качалка кронштейна 38 через нагрузочный механизм 12 соединена с электромагнитным тормозом 8.
Все элементы канала путевого управления от командных рычагов до КАУ и от КАУ до автомата перекоса и рулей направления связаны между собой шарнирными соединениями (на чертеже не показаны).
При отклонении педалей механизм дифференциального шага изменяет углы установки лопастей, увеличивая их на одном винте и уменьшая на ту же величину на другом. При этом возникает неравенство реактивных моментов несущих винтов, разность которых приводит к появлению неуравновешенного момента, разворачивающего вертолет вокруг вертикальной оси. Одновременно добавляется управляющий момент от сил, возникающих на рулях направления (на чертеже не показаны).
Электромагнитный тормоз поперечного управления 9 с нагрузочным механизмом 13, электромагнитный тормоз продольного управления 10 с нагрузочным механизмом 14 и электромагнитный тормоз путевого управления 8 с нагрузочным механизмом 12, установленные параллельно в кинематические цепи каналов управления, предназначены для имитации аэродинамических нагрузок на рычагах ППУ 1, 2 и педалях 5 и 6, а также для их уравновешивания в любом отклоненном положении. Кроме того, обеспечивается снятие усилия с загрузочных пружин (па чертеже не показаны) нагрузочных механизмов 12, 13 и 14 посредством растормаживания выходного вала, при подаче сигнала на электромагнитный тормоз 8, 9, 10 и создание па выходном валу противодействующего момента демпфирования.
Каждый электромагнитный тормоз 8, 9, 10 соединен со своим каналом управления посредством нагрузочных механизмов 12, 13, 14 и рычага (на чертеже не показаны), установленного на шлицы вала электромагнитного тормоза 8, 9, 10. Нагрузочные механизмы 12, 13, 14 связаны с качалкой управления и рычагом посредством болтового соединения.
При отклонении рычага ППУ 1, 2 или педалей 5, 6 под действием элементов системы управления пружины соответствующих нагрузочных механизмов 12, 13, 14 сжимаются. Нагрузочные механизмы 12, 13, 14 предназначены для создания па командных рычагах (рычаги ППУ и педали) градиента усилий, имитирующих аэродинамические нагрузки.
При нажатии на кнопку «ГРИММ» (на чертеже не показана) на рукоятке рычагов ППУ 1 или 2 с электромагнитной муфты соответствующего электромагнитного тормоза снимается фиксация, при этом под действием пружины и штока нагрузочного механизма его рычаг будет перемещаться в положение, при котором нагрузка па органе управления уменьшается до нуля.
При отпущенной кнопке «ТРИММ» отклонение командных рычагов от этого нового, нейтрального по нагрузке положения но мере отклонения будет сопровождаться увеличением нагрузки. Отклонение командных рычагов при нажатой кнопке «ТРИММ» будет происходить практически без усилий.
Электромагнитные тормозы 8, 9, 10 и нагрузочные механизмы 12, 13, 14 продольного, поперечного и путевого каналов управления вертолетом размещены под полом кабины экипажа. В канале управления общим шагом несущих винтов электромагнитный тормоз 7 размещен под полом кабины экипажа, механизм нагрузочный отсутствует, вместо него установлена тяга 11.
КАУ связан с качалками колонки ИВ и рулей направления (на чертеже не показаны) в каждом канале управления через выходные силовые штоки (на чертеже не показаны). Принимая входные сигналы от перемещения педалей 5, 6, рычагов ППУ 1, 2 и РОШ 3 и 4, КАУ генерирует пропорциональные (усиленные) управляющие сигналы на перемещение исполнительных рабочих органов системы управления НВ. При этом снимает нагрузку с командных рычагов от аэродинамических сил. воздействующих на несущие винты.
Предлагаемая система управления позволяет выполнять управление вертолетом по продольному, поперечному, путевому каналам управления и каналу управления общим шагом путем передачи управляющего воздействия на управляющую точку (качалку) агрегата управления.
Предлагаемая система управления, используя гибкие тяги 25, 26, 27 и 28, передает управляющее воздействие от проводки управления под полом кабины до КАУ не через отсек за кабиной фюзеляжа, а через центральную балку остекления кабины, внутреннее пространство которой не может быть использовано другими системами (фиг. 1, фиг. 6).
Таким образом, за счет лучшей компоновки системы управления освобождается полезное пространство за кабиной экипажа и под полом кабины.
Сравнение компоновок системы управления прототипа и предлагаемой системы управления дает представление о дополнительном пространстве, освобожденном для полезного использования.
Предлагаемая система управления соосного вертолета имеет следующие особенности конструкции:
- система управления имеет в каждом канале управления участок проводки с гибкой тягой:
- участок с гибкой тягой находится в неиспользуемой (непригодной для использования) зоне;
- система управления исключает необходимость применения уравновешивающих пружин в связи с отсутствием вертикальных тяг:
- компоновка системы управления не нарушает герметичности отсека мотогондолы;
- конструкция не требует осмотра в процессе эксплуатации в зоне прокладки гибких тяг;
- компоновка обеспечивает удобство обслуживания компонентов, их осмотра и контроля, а также выполнение регулировки системы в процессе производст ва и эксплуатации.
Осуществление изобретения в первую очередь позволяет решить задачу установки системы газонаполнепия 44 системы аварийных баллонетов внутри фюзеляжа, под полом кабины экипажа, рядом с контейнерами баллонетов 45, а также разместить в освободившихся объемах фюзеляжа за шпангоутом 43 кабины экипажа агрегаты других систем, обеспечивая возможность удобного доступа к их компонентам (фиг. 6).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ТОРМОЖЕНИЯ КОЛЕС ШАССИ ВЕРТОЛЕТА | 2023 |
|
RU2796557C1 |
| Механическая система торможения несущих винтов вертолёта | 2019 |
|
RU2729870C1 |
| КАБИНА ВЕРТОЛЕТА С ТРАВМОБЕЗОПАСНЫМИ ОРГАНАМИ УПРАВЛЕНИЯ | 2004 |
|
RU2265556C1 |
| ВЕРТОЛЕТ | 2004 |
|
RU2263607C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЁТОМ | 2023 |
|
RU2819837C1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2019 |
|
RU2726560C1 |
| ВЕРТОЛЕТ С СООСНЫМИ НЕСУЩИМИ ВИНТАМИ | 2004 |
|
RU2265554C1 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| Многоцелевой вертолет и топливная система вертолета | 2020 |
|
RU2752810C1 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728945C1 |
Изобретение относится к области авиации, в частности к конструкциям систем управления вертолетами. Система управления вертолета соосной схемы состоит из комбинированного агрегата управления и соединенных с ним каналов поперечного управления, продольного управления, управления общим шагом и путевого управления. Каждый канал управления содержит орган управления, триммерный и кинематический механизмы. Кроме того, каналы управления размещены под полом кабины и соединены с комбинированным агрегатом управления посредством гибких тяг, которые закреплены на центральной балке остекления, жестко связанной со шпангоутом кабины вертолета. Обеспечивается компактность элементов системы управления, освобождение полезного объема под полом кабины. 6 з.п. ф-лы, 8 ил.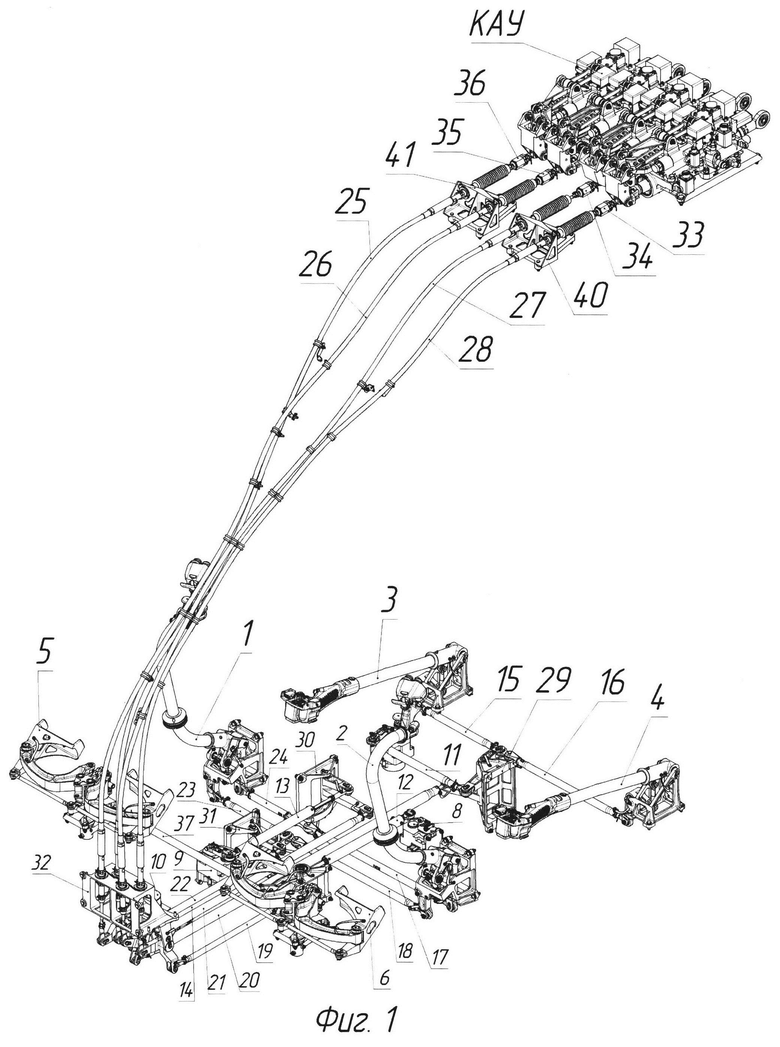
1. Система управления вертолетом соосной схемы в составе комбинированного агрегата управления и соединенных с ним каналами поперечного управления, продольного управления, управления общим шагом и путевого управления, каждый из которых содержит орган управления, триммерный и кинематический механизмы, отличающаяся тем, что каналы управления, размещенные под полом кабины, соединены с комбинированным агрегатом управления посредством гибких тяг, которые закреплены на центральной балке остекления, жестко связанной со шпангоутом кабины вертолета.
2. Система управления но п. 1, отличающаяся тем, что органы управления каналов поперечного и продольного управлений представляют собой общие командные рычаги управления, связанные с кинематическим механизмом соответствующего канала.
3. Система управления по п. 1, отличающаяся тем, что орган управления канала общим шагом представляет собой систему командных рычагов общего шага, связанную с кинематическим механизмом канала управления общим шагом.
4. Система управления по п. 1, отличающаяся тем, что орган управления канала путевого управления представляет собой систему педалей управления, связанную с кинематическим механизмом канала путевого управления.
5. Система управления по п. 1, отличающаяся тем, что триммерный механизм каналов поперечного, продольного и путевого управления соединен с кинематическим механизмом соответствующего канала управления и содержит связанные между собой электромагнитный тормоз и нагрузочный механизм.
6. Система управления по п. 1, отличающаяся тем, что кинематический механизм каждого канала соединен с отдельной гибкой тягой и содержит систему связанных между собой жестких тяг и качалок.
7. Система управления по п. 1, отличающаяся тем, что гибкая тяга каждого канала управления закреплена с двух сторон по длине центральной балки остекления хомутами и подсоединена при помощи муфт к качалке управления комбинированного агрегата управления.
| US 4345195 A1, 17.08.1982 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ ДОЛГОВЕЧНОСТИ ИЗДЕЛИЯ ИЗ АЛЮМИНИЯ, РАБОТАЮЩЕГО В УСЛОВИЯХ ПОЛЗУЧЕСТИ | 2012 |
|
RU2502825C1 |
| US 9381998 B2, 05.07.2016 | |||
| US 20110031346 A1, 10.02.2011 | |||
| СИСТЕМА И СПОСОБЫ УПРАВЛЕНИЯ С ПОМОЩЬЮ АВТОПИЛОТА | 2013 |
|
RU2623792C2 |

