Датчики к ультразвуковым диагностическим аппаратам, содержащие корпус, излучатель ультразвукового нриемо-передатчика, координатные потенциометры, синус-косинусный вращающийся трансформатор, механическую Передачу и электропривод, известны.
Предлагаемый датчик отличается тем, что в Нем установлен контейнер с эластичной мембраной, заполненный, например, касторовым маслом, свободно вращающийся вокруг оси, на которой внутри контейнера жестко закреплен излучатель, и опирающийся на подшипники, закрепленные в корпусе. Механический привод перемещения оси осуществляется от электродвигателя через механическую систему, ведущие элементы которой закреплены на корпусе, а ведомые на контейнере. Такое отличие обеспечивает последовательное сканирование ультразвуковым лучом по исследуемой поверхности тела путем механического регулярного качательного -движения излучателя ультразвукового приемо-передатчика независимо от положения корпуса датчика.
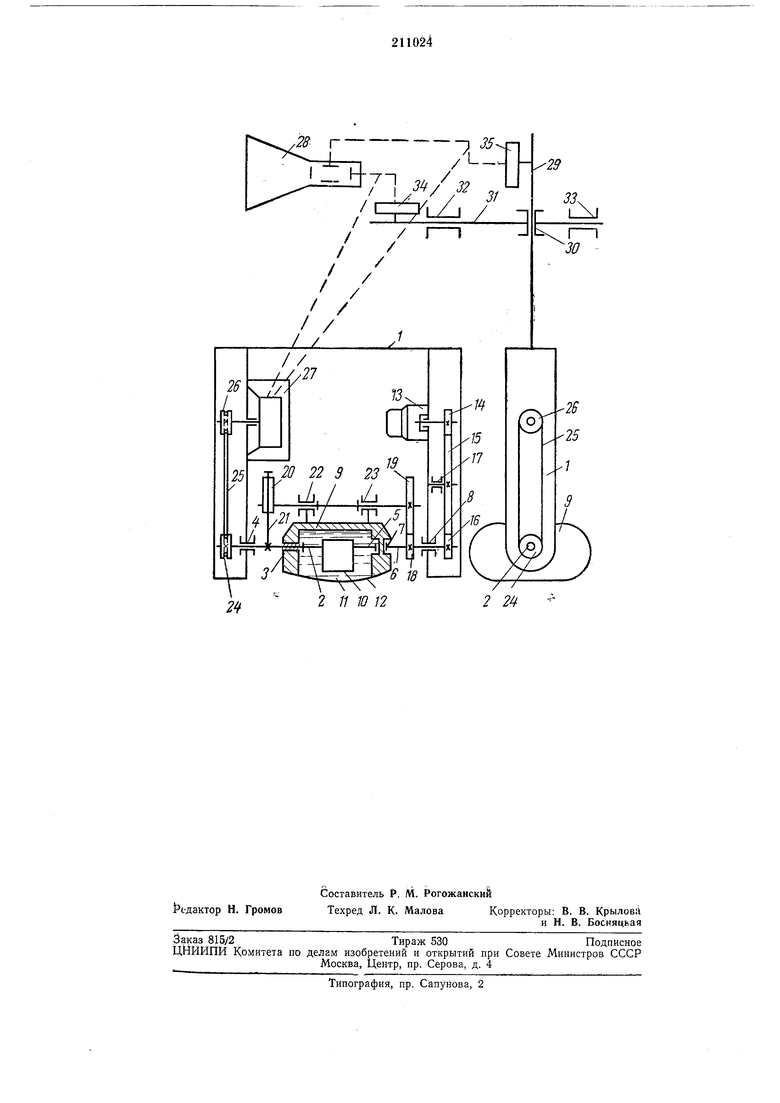
На чертеже изображена принципиальная схема описываемого датчика, в двух проекциях.
Датчик содержит корпус 1, ось 2, проходящую через подщипник 3 с сальником и лежащую в подщипнике 4, жестко закрепленном в корпусе. Конец оси 2 поддерживается подшип52
НИКОМ 5. Соосно оси 2 установлена ось 6, лежащая в подшипниках 7 и 5. Внутри контейнера на оси 2 жестко закреплен ультразвуковой излучатель 10. Контейнер 9 заполнен жидкостью 11, например, касторовым маслом. Нижняя поверхность контейнера образована эластичной мембраной 12.
Механический привод оси 2 содержит электродвигатель 13, шестерни 14, 15 и 16, подшипник 17, ведущую 18 и ведомую 19 шестерни, эксцентрик 20, вилку 21 эксцентрика, закрепленную на оси 2, подшипники 22 и 23, закрепленные на контейнере.
На оси 2 расположен также шкив 24, который с помощью нити 25 гибкой передачи связан со шкивом 26, закрепленным на оси ротора синус-косинусного трансформатора 27. Последний электрически связан с обеими парами отклоняющих пластин электроннолучевой
трубки 28.
Корпус датчика жестко соединен с вертикальным штоком 29, свободно скользящим в подшипнике 30. Датчик снабжен также горизонтальным штоком 31, опирающимся на подшипники 32 и 33.
Шток 31 взаимодействует с движком координатного горизонтального потенциометра 34, который электрически связан с парой горизонтальных отклоняющих пластин электронномодействует с движком координатного вертикального потенциометра 35, электрически связанного с парой вертикально отклоняющих пластин трубки 28.
Датчик работает следующим образом.
Эластичная мембрана 12 -своей поверхностью лежит на смазанной маслом поверхности исследуемого тела (для обеспечения акустического Контакта между телом и мембраной). Электродвигатель 13 через передаточные щестерни 14, 15, 16, 18 и 19 вращает эксцентрик 20. Последний при вращении приводит в качательное движение вилку 21, закрепленную на оси 2, на -которой также закреплены излучатель 10 и щкив 24. Качательные движения последнего с помощью нити 25 и щкива 26 передаются ротору вращающегося синус-косинусного трансформатора 27.
Одновременно с качательными движениями излучателя 10 корпус 1 датчика перемещается вручную или с помощью электропривода по поверхности исследуемого тела в плоскости качания излучателя посредством перемещения штока 31 В подшипниках 32 и 33. При этом непосредственно с телом контактирует эластичная мембрана 12 контейнера 9. Так как поверхность, вдоль -которой перемещается датчик, не является плоскостью, параллельной штоку 31, то корпус /, укрепленный на штоке 29, свободно скользящем в подшипнике 30, скользит по вертикали в соответствии с профилем поверхности, вдоль которой он перемещается. Горизонтальное и вертикальное перемещения передаются на развертку электроннолучевой трубки 28 напряжениями, снимаемыми с потенциометров 34 и 35, пропорциональными соответствующим перемещениям.
При перемещении датчика вдоль неровной поверхности контейнер 9, -следуя за ее неровностями, поворачивается на различные углы, вращаясь на осях 2 и 6.
При этом эксцентрик 20 увлекает за собой вилку 21 и ось 2 с излучателем 10. Шестерня 19 при этом катится по шестерне 18 и на некоторый дополнительный угол поворачивает эксцентрик и излучатель. Во время поворота контейнера и в новом положении излучатель попрежнему совершает те же качательные движения относительно контейнера 9, независящие от угла поворота контейнера относительно корпуса 1. Таким образом, угол поворота ротора синус-косинусного трансформатора 27 в любой момент соответствует углу поворота излучателя 10 относительно корпуса 1, который не изменяет своей угловой ориентации в
15 пространстве. Следовательно, угловые и линейные координаты излучателя передаются без искажений на развертку электро-ннолучевой трубки 28.
Q Пред мет изобретения
Датчик -к ультразвуковым диагностическим аппаратам, содержащий корпус, излучатель ультразвукового приемо-передатчика, координатные потенциометры, синусно-косинусный
5 вращающийся трансформатор, механическую передачу и электропривод, отличающийся тем, что, с целью получения последовательного сканирования ультразвуковым лучом по исследуемой поверхности тела путем механического регулярного качательного движения излучателя ультразвукового приемо-передатчика независимо от положения корпуса датчика, в нем установлен контейнер с эластичной мембраной, заполненный, например, касторовым маслом,
5 свободно вращающийся вокруг оси, на которой внутри контейнера жестко закреплен излучатель, и опирающейся на подшипники, закрепленные в корпусе, механический привод перемещения оси осуществляется от электропривода через механическую систему, ведущие элементы которой закреплены на корпусе, а ведомые на контейнере.
//
/ /
/ /
д; /7 22 3 23
JLJT
|.-ГТГггГ/
лТ/....Т
Г3
-7
-2
-i-25
-75 -77 -7
.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ ДИАГНОСТИЧЕСКИЙ АППАРАТ | 1970 |
|
SU260815A1 |
| Стабилизатор положения датчика эхокардиографа | 1990 |
|
SU1782542A1 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| Устройство для неразрушающего контроля поверхности электропроводящих объектов | 1989 |
|
SU1682903A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫЛЕТА В УСТРОЙСТВЕ БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271986C2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ПОВОРОТА НОСОВОЙ ОПОРЫ ШАССИ САМОЛЕТА И СПОСОБ ЕГО РАБОТЫ | 2015 |
|
RU2583518C1 |
| Устройство для измерения линейной плотности волокнистого продукта | 1987 |
|
SU1418355A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ ВОЗДУХА В ШИНАХ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2532631C1 |
| Функциональный преобразователь для контурной системы программного управления | 1976 |
|
SU641457A1 |