В канатной подъемной машине с несколькими шкивами трения, каждый из которых приводится индивидуальным двигателем, не допускается отклонение величин соотношений скоростей от требуемых значений, так как отклонение приводит к расцеплению каната со шкивами и резкому снижению тяговой способности агрегата.
Известное устройство для поддержания заданного соотношения скоростей двигателей в многодвигагельном электроприводе содержит датчики, регуляторы двигателей и связывающие эти регуляторы блоки.
Предложенное устройство для поддержания заданного соотношения скоростей в многоприводном электродвигателе позволяет приблизить текущее значение скоростей или моментов к эталонным значениям. Его особенность заключается в том, что параллельно датчикам подключены потенциометры, к одноименным выходам которых через связывающие блоки, образованные последовательно соединенными делителями напряжения, подключаются входы регуляторов двигателей.
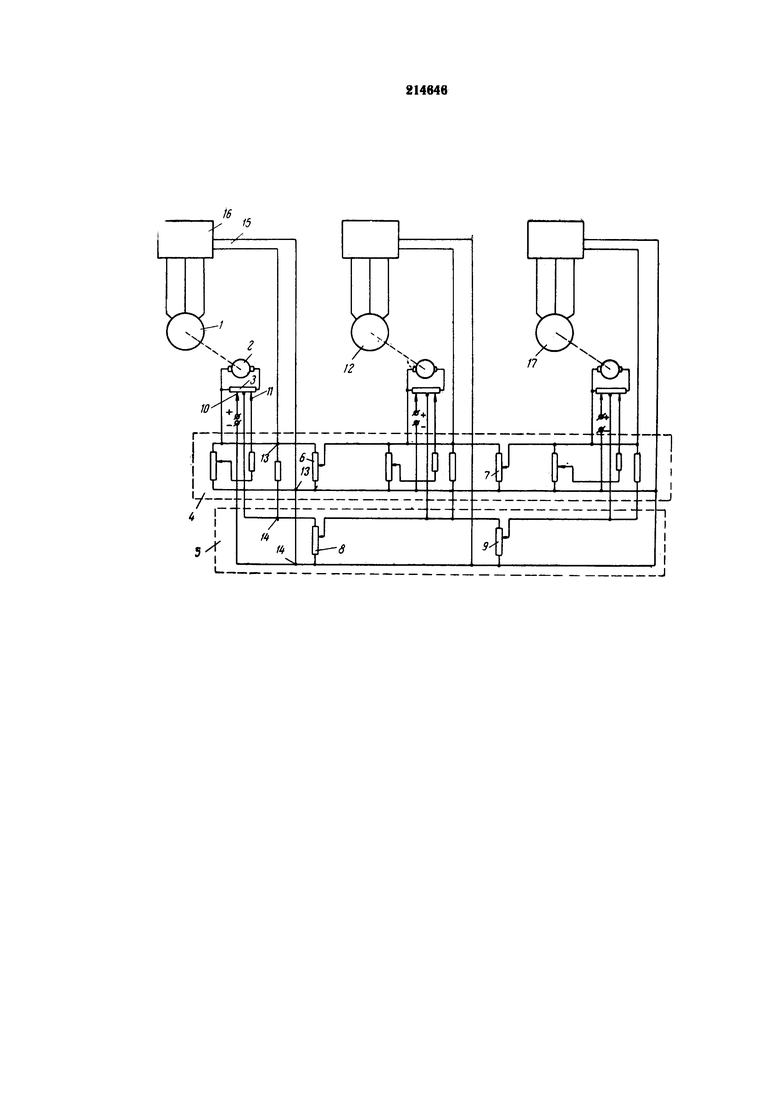
На чертеже показана принципиальная схема устройства для регулирования заданного соотношения скоростей двигателей.
Двигатели оснащены одинаковыми измерительными регулирующими устройствами.
Устройство работает следующим образом. Скорость двигателя 1 замеряется и преобразуется датчиком 2, например, тахогенератором, в напряжение постоянного тока. Выходная величина датчика, соответствующая текущему значению скорости, разделяется на сумму, например, двух равных сигналов при помощи потенциометра 3, который может конструктивно входить в датчик, либо встраиваться в него.
Полученные таким образом сигналы скорости подаются на соответствующие участки связывающих блоков 4 и 5. Количество связывающих блоков выбирается по числу получаемых сигналов скорости, а количество участков в связывающем блоке равно числу регулируемых двигателей.
Связывающий блок 4 состоит из последовательно соединенных делителей напряжения 6 и 7. Связывающий блок 5 образован последовательно соединенными делителями напряжений 8 и 9.
Один из сигналов скорости двигателя 1 снимается с датчика контактом 10 и по цепи, включенной на вход, «например делителя 6, поступает на первый участок связывающего блока 4.
Другой сигнал скорости двигателя 1 снимается с датчика контактом 11 и по цепи, включенной на вход делителя 8, поступает на первый участок связывающего блока 5. Этот процесс аналогичен и для двигателя 12. Один из сигналов скорости будет поступать в связывающий блок 5 по цепи, включенной на вход делителя 7 (или выход делителя 6), а второй сигнал скорости - в связывающий блок 5 по цепи, включенной на вход делителя 9 (выход делителя 8).
Одноименные участки связывающих блоков 4 и 6 соединяются таким образом, что выходная величина участка блока 4 подается как эталонное значение на одноименный участок связывающего блока 5.
Выходы 13 и 14 участков связывающих блоков 4, 5 соединяются параллельно и подаются на вход 15 регулятора 16.
Блоки 4, 5 обеспечивают отрицательную обратную связь по сигналу своей скорости и положительную взаимосвязь по аналогичным сигналам скоростей других двигателей. В результате этого схема регулирования скорости каждого двигателя удовлетворяет двум требованиям - обеспечивает стабилизацию собственной скорости и одновременно делает собственную скорость чувствительной к изменению скоростей других двигателей.
Соотношение скоростей регулируется, например блоком 5, следующим образом. Ток управления в каждом регуляторе представляет сумму составляющих, определяемых влиянием одного двигателя на другого, которое зависит от величины принятых соотношений скоростей или моментов двигателей и реализуется делителями 6, 7. Когда под действием какого-либо возмущения нарушается требуемое соотношение скоростей, начинается автоматическое взаимосвязанное изменение токов управления двигателями. Требуемый количественный и качественный законы изменения скорости каждого двигателя, при которых соотношение скоростей поддерживается с заданной точностью, достигается путем последовательного приближения.
Регулирование соотношений скоростей последовательным приближением заключается в том, что одним сигналом скорости, учитывающим с помощью одного связывающего блока свою скорость и скорости всех остальных двигателей, т.е. 12, 17, ошибка регулирования скорости двигателя 1 уменьшается до некоторой величины.
B свою очередь, оставшаяся ошибка учитывает ошибки двигателей 12, 17 и является задающим воздействием для второго сигнала скорости двигателя 1. Второй сигнал скорости двигателя 1 с помощью другого связывающего узла учитывает скорость своего двигателя и скорости двигателей 12, 17.
Полученное рассогласование подается на вход регулятора и уменьшает ошибку регулирования также на некоторую величину.
Чем больше сигналов скорости будет сниматься с выходов датчиков, тем больше требуется связывающих блоков, тем больше составляющих будет входить в ток управления скоростью каждого двигателя и тем точнее будет поддерживаться заданное соотношение скоростей.
Предлагаемое устройство позволяет поддерживать соотношение скоростей неограниченного количества двигателей.
Делители 6, 7, 8, 9 могут быть выполнены на апериодических, интегрирующих, дифференцирующих и др. звеньях, а так же на вычислительных элементах.
Выходы датчиков могут соединяться со связывающими узлами через указанные звенья и элементы. Регуляторы скорости могут быть выполнены, например, на дросселях насыщения, тиристорах или симметрично управляемых вентилях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поддержания заданного соотношения скоростей в многодвигательном электроприводе | 1977 |
|
SU746853A1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2024 |
|
RU2832922C1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399017C1 |
| РЕГУЛЯТОР УГЛА ПОДАЧИ ИМПУЛЬСОВ ТОКА В ФАЗНЫЕ ОБМОТКИ РЕАКТИВНОГО ИНДУКТОРНОГО ДВИГАТЕЛЯ | 1993 |
|
RU2088040C1 |
| Частотно-регулируемый электроприводС эКСКАВАТОРНОй ХАРАКТЕРиСТиКОй | 1978 |
|
SU830625A1 |
| Система поддержания заданного соотношения скоростей | 1983 |
|
SU1136291A1 |
| Электропривод переменного тока | 1990 |
|
SU1758821A1 |
| Следящий рулевой электропривод | 2022 |
|
RU2800527C1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Способ рихтовки каната и устройство для его осуществления | 1985 |
|
SU1349826A1 |
Устройство для поддержания заданного соотношения скоростей в многодвигательном электроприводе канатной подъемной машины со шкивами трения, содержащее датчики, регуляторы двигателей и связывающие эти регуляторы блоки, отличающееся тем, что, с целью увеличения точности, путем последовательного приближения текущих значений скоростей к эталонным значениям, параллельно указанным датчикам подключены потенциометры, на выходе которых через связывающие блоки, образованные последовательно включенными делителями напряжения, подсоединены входы регуляторов двигателей.
