Изобретение относится к системам управления гидравлическими прессами.
Известна система управления гидравлическим прессом, содержащая исполнительные цилиндры, соединенные магистралями через гидравлический кулачковый командоапларат с низколроизводительным насосом низкого давления, низкопроизводительным насосом высокого давления и с высокопроизводительным насосом низкого давления, а также установленные в магистралях датчики командных сигналов.
Описываемая система управления отличается от известной тем, что в нее встроены двухпозиционные переключатели в количестве, соответствующем числу исполнительных цилиндров, кинематически связанные с кулачковым валом командоаппарата и гидравлически - с низкопроизводительным насосом высокого давления и с датчиками командных сигналов. Один из датчиков выполнен в виде золотникового Предохранительного клапана, .снабженного регулируемой , .настраиваемой на заданное давление от кулачкового вала командоаетпарата. Это обеспечивает работу .пресса в автоматическом и -полуавтоматическом режимах.
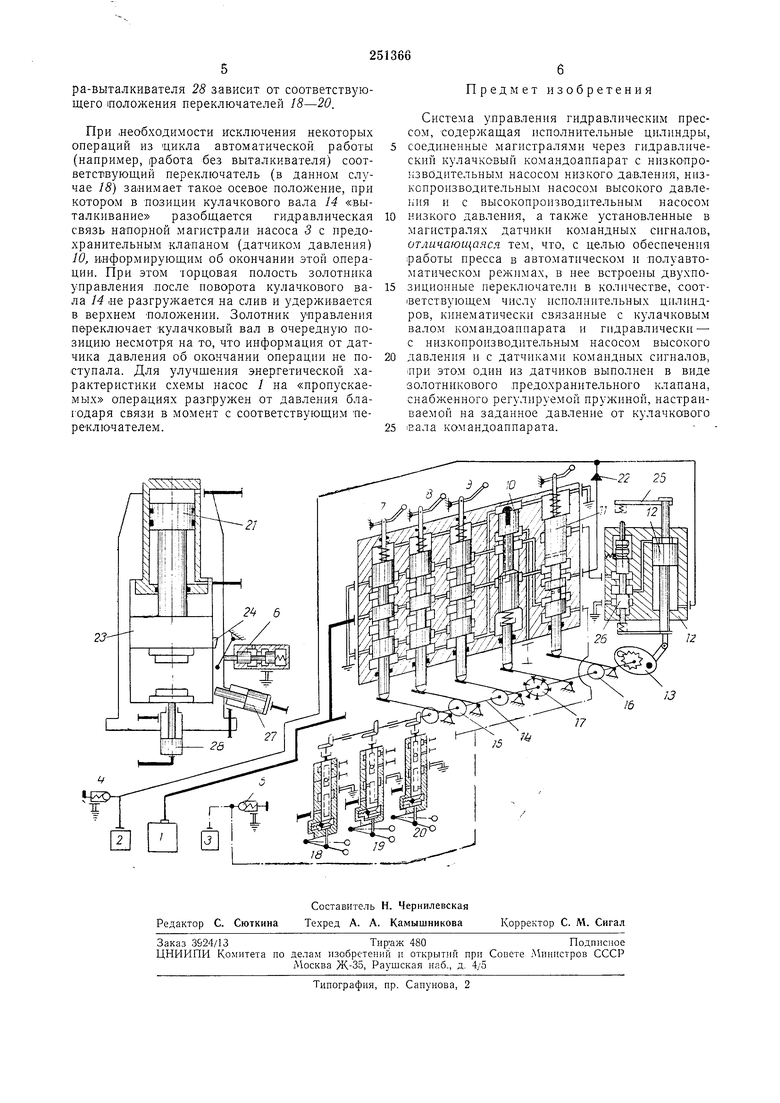
Описываемая система управления включает насос / высокого давления до 320 кгс/см-2 малой производительности, насос 2 высокого давления до 20-25 кгс/см-2 большой производительности, низкопроизводительный насос 3 производительностью 5-8 л/мин на давление порядка 5 /сгс/слгз, предохранительные клапаны 4 и 5 насосов 2 и 3, гидравлический путевой датчик 6 (таких в схеме может быть несколько) и гидравлический кулачковый командоаппарат.
В состав командоаппарата входят следующие элементы: распределительные золотники (золотник 7 для цилиндра механизма загрузки и съема изделий, золотник 8 для главного рабочего цилиндра, золотник 9 для цилиндра выталкивателя). Количество золотников определяется числом исполнительных механизмов пресса. Кроме того, в командоаппарат входят
предохранительный клапан 10 золотникового типа для насоса / (он же выполняет функции датчика давления), золотник 11, управляющий работой блока 12 переключения командоаппарата и разгружающий на слив вспомогательный насос 2 (для тех операций цикла, на которых он не используется); храповой механизм 13, связывающий блок 12 переключения с кулачковым валом 14; профилированные кулачки 15 и 16, обеспечнвающие переключение
ными циклограммами; регулируемый кулачок 17, обеспечивающий настройку пружины золотника предохранигельного клапана 10 на давление, необходи-мое для выполнения текущей операции и подачи командного сигнала об ее окончании; переключатели 18-20, связанные кинематически с кулачковым валом 14, а гидравлически -с датчиками командных сигналов.
Каждый из дереключателей имеет два осевых положения: в одном положении переключатель определяет участие соответствующего механизма в цикле работы пресса, т. е. соединяет магистраль .насоса 3 с датчиками, дающими информацию об окончании соответствующей операции, в другом положении исключает из цикла операции участие соответствующего механизма в .результате разобщения магистрали насоса 3 и датчиков командных сигналов.
Путевой датчик 6 или датчик давления (предохранительный клапан) 10 до момента «срабатывания связывают магистраль насоса 3 со сливом. «Срабатывание датчиков соответствует их положению, в котором магистраль насоса 3 разобщена со сливом, и в ней поднимается давление до величины, ограниченной настройкой клапана 5.
Распределительные золотники 7-9, золотник и управления и переключатели 18-20 имеют рукоятки, с помощью которых осуществляют ручное управление исполнительными механизмами или прерывают отдельные операции в дикле.
Работа системы управления в автоматическом и полуавтоматическом режимах сводится к тому, чтобы ,в конце текущей онерации повернуть кулачковый вал 14 на определенный угол и тем самым нереместить распределительные золотники 7-9 ,в .положение, соответствующее совершению очередной операции. Процесс Перевода кулачкового вала в следующую .позицию можно пояснить на примере ускоренного хода ползуна .пресса вниз С переходом на замедленный рабочий ход и его переключения на обратный ход после выполнения рабочей операции.
Кулачковый вал 14 в момент начала переМещения ползуна пресса вниз определяет следующее расположение распределительных золотников 7-9, золотник 11 управления и переключателей 18-20.
Распределительный золотник 5 и золотник 11 управления находятся в крайнем нижнем положении, а распределительные золотники 7 и 9 - в среднем пол.ожении. Переключатель 20 занимает положение, при котором напорная магистраль насоса 3 соединена подводами через путевой датчик 6 со сливом, а переключатели 18 и 19 разобщают магистраль насоса 3 с датчиками командных сигналов.
тельного золотника 8 двумя потоками: один поток - от насоса 2 через обратный клапан 22 и золотник 11 управления, другой поток - от насоса 1 через среднюю .проточку распределительного золотника 7. Штоковая полость главного цилиндра через распределительный золотник 8 соединена -со сливом.
Ползун пресса 23 соверщает ускоренный ход вниз, отжимая выступом 24 золотник путевого
датчика 6 в правое крайнее положение и разобщая на.порную магистраль насоса 3 от слива (датчик «сработал). При этом жидкость от насоса 3 под давлением 5 кгс/см поступает 1ПОД торец золотника 11 управления и перемещает его вверх,соединяя напорную магистраль насоса 2 через внутреннее сверление в зологнике управления с рабочей полостью цилиндра блока }2 .переключения. Порщень цилиндра блока переключения перемещается вниз, поворачивая через храповой механизм 13 кулачковый вал на определенный угол.
В конце хода поршня жестко закрепленными на нем сталкивателями 25 .переключается в нилснее положение золотник 26, который соединяет рабочую полость цилиндра блока переключения со сливом.
Лод действием давления жидкости е нижней полости цилиндра блока переключения, постоянно сообщенной с нагнетательной магистралью насоса 2, происходит возвратный ход порщня, подготавливая весь механизм к очередному срабатыванию.
После поворота кулачкового вала 14 торцовая полость золотника управления соединяется через переключатель 19 и предохранительный клапан (датчик давления) W со сливом. Золотник управления займет среднее положение (определяемое кулачком 16), соединив тем
самым (на.порную магистраль насоса 2 со сливом. При этом ползун пресса перейдет с ускоренного холостого хода на замедленный рабочий ход.
В конце рабочей операции в напорной магистрали насоса / начинает повышаться давление, которое при определенной величине (определяемой настройкой пружины предохранительного клапана 10) переместит золотник предохранительного клапана W вниз, разобщив тем самым напорную магистраль насоса 5 от слива. В на.порной магистрали насоса 3 мгновенно повышается давление (датчик давления «сработал), после чего срабатывает механизм блока 12 переключения и .происходит поворот кулачкового вала 14, аналогично ранее описанному. При этом распределительный золотник 8 займет верхнее положение, соединив напорные магистрали насосов / и 2 со щтоковой полостью главного цилиндра, а рабочую полость со сливом. Ползун пресса начнет перемещаться вверх.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический командоаппарат | 1961 |
|
SU151519A1 |
| Система управления гидравлическим прессом | 1980 |
|
SU891484A1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| Устройство для автоматического регулирования давления в гидравлическом прессе | 1983 |
|
SU1133119A1 |
| А УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU201036A1 |
| ГИДРАВЛИЧЕСКИЙ КОМАНДОАППАРАТ | 1968 |
|
SU207275A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМПРЕССОМ | 1971 |
|
SU418351A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ | 1973 |
|
SU397370A1 |
| ГИДРАВЛИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 1966 |
|
SU214849A1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
