В известных релейных следящих системах двигатель имеет два уровня скорости - основной и малый, на котором двигатель подходит к заданному положению.
Предложенная система отличается от известных тем, что вход ее усилителя через нормально замкнутый и разомкнутый контакты реле времени соединен соответственно со щеткой и сигнальным концом делителя сигнала рассогласования. Это позволяет повысить точность и упростить конструкцию устройства.
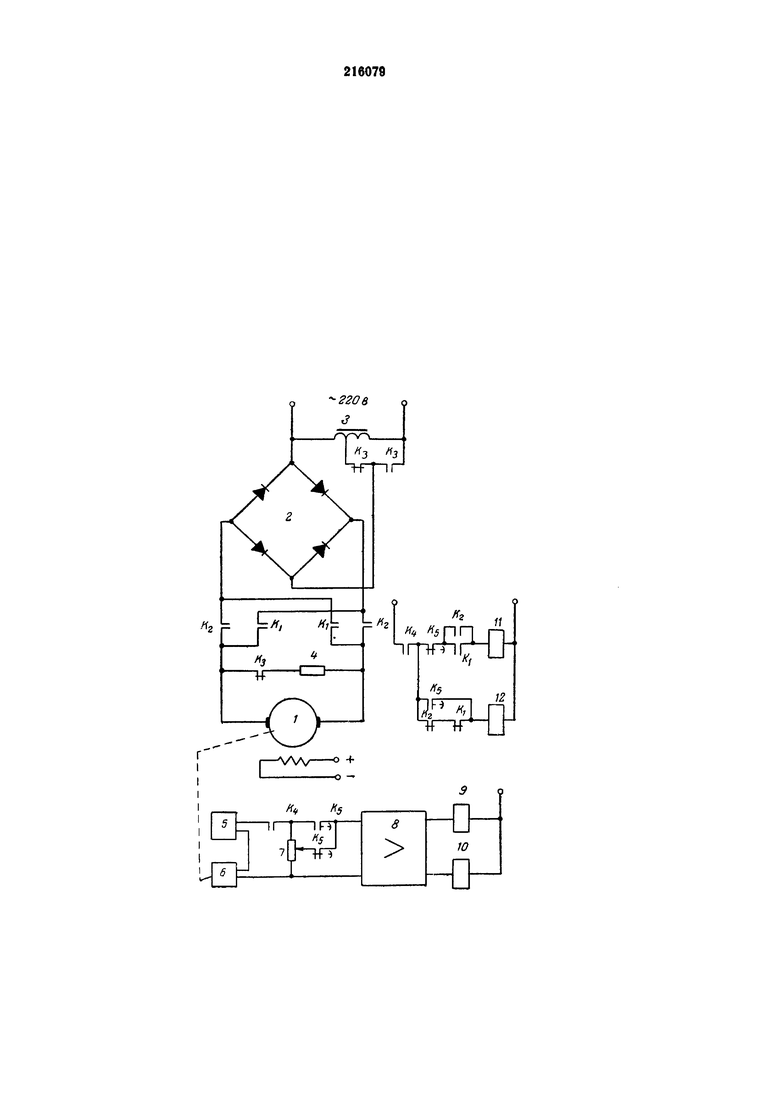
На чертеже показана схема релейной следящей системы.
Исполнительный двигатель 1 постоянного тока с независимым возбуждением соединен с сетью переменного тока через контакты K1 или K2, выпрямитель 2, контакты K3 и автотрансформатор 3. Параллельно двигателю включена цепь динамического торможения, состоящая из контакта K3 и резистора 4,
Задающие перемещение элементы 5 и элементы 6 обратной связи соединены так, что разность их напряжений подается через контакт K4, потенциометр 7 и контакты K5 на фазочувствительный усилитель 8 релейного действия, к выходу которого подсоединены реле 9 и 10 (соответственно с контактами K2 и K1).
Когда механизм находится вне зоны малой скорости, система работает следующим образом.
После подачи команды на отработку (замыкаются контакты K4) на усилитель 8 через потенциометр поступает часть сигнала рассогласования задающих элементов 5 и элементов 6 обратной связи. В зависимости от требуемого направления движения срабатывает реле 9 или 10, включая реле 11 и подключая двигатель 1 прямо к сети переменного тока через выпрямитель 2. Реле 12 времени при этом не срабатывает. Двигатель начинает приводить механизм на большой скорости.
Потенциометр 7 отрегулирован так, что при входе механизма в зону малой скорости усилитель снимает напряжение с нагрузки, реле 9 или 10 срабатывают, двигатель отключается, срабатывает реле 11, двигатель через замкнувшийся контакт K3 подключается на резистор 4 и тормозится. Образовавшаяся цепь из контактов K4, K2, K1 запитывает реле 12, которое срабатывает с выдержкой времени, равной удвоенному времени срабатывания реле 9 или 10. После срабатывания реле 12 через свой контакт K5 подключается к источнику питания только через контакт K4, независимо от контактов K2 и K1. Одновременно через перекинувшиеся контакты K5 на усилитель 8 подается полное напряжение рассогласования. Вновь срабатывает реле 9 (или 10), и двигатель 1 подключается к сети по тем же цепям, но уже через автотрансформатор 3, приводя механизм уже на малой скорости. Сопротивление резистора 4 подбирают так, чтобы в режиме работы на малой скорости не был перегружен выпрямитель 2.
При подходе механизма к точке отработки сигнал рассогласования настолько уменьшается, что реле 9 (или 10) срабатывает, и двигатель отключается.
Когда механизм находится в зоне малой скорости, система работает следующим образом.
После подачи команды на отработку (замыкаются контакты K4 на усилитель 8 через потенциометр 7 поступает часть сигнала рассогласования. При этом ввиду малости этого сигнала реле 9 (или 10) не срабатывает. Через определенное время срабатывает запитанное через контакты K4, K2 и K1 реле 12, благодаря чему на усилитель подается полный сигнал рассогласования, а также реле 9 (или 10) и двигатель подключается к сети через выпрямитель и автотрансформатор, так как реле 11 не сработало (в его цепи разомкнут контакт K5).
При подходе механизма на малой скорости к точке отработки сигнал рассогласования уменьшается, реле 9 (или 10) срабатывает и двигатель отключается.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1994 |
|
RU2113005C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ЗАРЯДА ЭЛЕКТРИЧЕСКИХ ТРАНСПОРТНЫХ СРЕДСТВ | 2021 |
|
RU2795552C1 |
| БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2368871C2 |
| АНАЛОГО-ДИСКРЕТНАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 1966 |
|
SU216082A1 |
| СПОСОБ СОГЛАСОВАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ ТРАНСПОРТНЫХ СРЕДСТВ | 2013 |
|
RU2543434C2 |
| КВАЗИОПТИМАЛЬНАЯ ПО БЫСТРОДЕЙСТВИЮ СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU326548A1 |
| Устройство для управления электроприводом постоянного тока | 1959 |
|
SU122516A1 |
| ПРИВОДНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2080266C1 |
| Устройство для определения времени полета | 1991 |
|
SU1819820A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2383863C1 |
Релейная следящая система, содержащая усилитель, реле времени и делитель сигнала рассогласования, отличающаяся тем, что, с целью повышения точности и упрощения конструкции, вход усилителя через нормально замкнутый и разомкнутый контакты реле времени соединен соответственно с щеткой и сигнальным концом делителя сигнала рассогласования.
