Изобретение относится к средствам навигации и управления подвижными объектами, а именно к инерциальным навигационным системам.
Известен бесплатформенный инерциальный измерительный преобразователь [1], содержащий блок датчиков линейных ускорений, блок датчиков угловых скоростей, вычислительное устройство.
Более близким по технической сущности является бесплатформенный инерциальный измерительный преобразователь [2], содержащий три акселерометра, первый, второй и третий гироскопические измерители угловой скорости, вычислительное устройство, устройства компенсации погрешностей, подключенные к выходам гироскопических измерителей угловой скорости.
Недостатком такого бесплатформенного инерциального измерительного преобразователя является наличие только выходных сигналов, выраженных в дискретном виде.
Техническим результатом изобретения является расширение функциональных возможностей бесплатформенного инерциального измерительного преобразователя.
Данный технический результат достигается в бесплатформенном инерциальном измерительном преобразователе, содержащем три акселерометра, первый, второй и третий гироскопические измерители угловой скорости, вычислительное устройство, устройства компенсации погрешностей, подключенные к выходам гироскопических измерителей угловой скорости, тем, что выполнены первое, второе и третье устройства компенсации погрешности коэффициента преобразования соответственно для первого, второго и третьего гироскопических измерителей угловой скорости, первое, второе, третье, четвертое, пятое и шестое устройства компенсации перекрестной связи между гироскопическими измерителями угловой скорости, каждое устройство компенсации погрешности коэффициента преобразования гироскопического измерителя угловой скорости содержит подключенный к потенциальному выходу гироскопического измерителя угловой скорости первый повторитель, подключенный к его выходу операционный усилитель с первым входным резистором RB1 и первым резистором обратной связи R01, подключенный к выходу операционного усилителя инвертор, второй повторитель, подсоединенный к выводу нулевого потенциала выхода гироскопического измерителя угловой скорости, в операционном усилителе предусмотрено подключение второго входного резистора RB2=k1RB1 (где k1 - коэффициент; k1≥0), если KP/KH=k2>1 (где KP, KH - соответственно реальный и номинальный коэффициенты преобразования данного гироскопического измерителя угловой скорости, k2 - коэффициент), при этом k1=(k2-1); в операционном усилителе предусмотрено подключение последовательно с первым резистором обратной связи второго резистора обратной связи R02=k3R01 (где k3 - коэффициент, k3≥0), если k1<1, при этом k3=(1/k2)-1, каждое устройство компенсации перекрестной связи содержит переключатель на два положения, подключенный к его переключающему контакту резистивный делитель с коэффициентом деления n, резистор компенсации RK=k4RB1 (где k4 - коэффициент), который подключен первым своим выводом к выходу резистивного делителя, выход операционного усилителя в первом устройстве компенсации погрешности коэффициента преобразования подключен к размыкающим контактам переключателей первого и второго устройств компенсации перекрестной связи, выход инвертора первого устройства компенсации погрешности коэффициента преобразования подключен к замыкающим контактам переключателей первого и второго устройств компенсации перекрестной связи, второй вывод резистора компенсации в первом устройстве компенсации перекрестной связи подсоединен к выходу первого повторителя во втором устройстве компенсации погрешности коэффициента преобразования, второй вывод резистора компенсации во втором устройстве компенсации перекрестной связи подключен к выходу первого повторителя в третьем устройстве компенсации погрешности коэффициента преобразования, выход операционного усилителя во втором устройстве компенсации погрешности коэффициента преобразования подключен к размыкающим контактам переключателей третьего и четвертого устройств компенсации перекрестной связи, выход инвертора второго устройства компенсации погрешности коэффициента преобразования подсоединен к замыкающим контактам переключателей третьего и четвертого устройств компенсации перекрестной связи, второй вывод резистора компенсации в третьем устройстве компенсации перекрестной связи подключен к выходу первого повторителя в первом устройстве компенсации погрешности коэффициента преобразования, второй вывод резистора компенсации в четвертом устройстве компенсации перекрестной связи подсоединен к выходу первого повторителя третьего устройства компенсации погрешности коэффициента преобразования, выход операционного усилителя третьего устройства компенсации погрешности коэффициента преобразования подсоединен к размыкающим контактам переключателей в пятом и шестом устройствах компенсации перекрестной связи, выход инвертора третьего устройства компенсации погрешности коэффициента преобразования подключен к замыкающим контактам переключателей пятого и шестого устройств компенсации перекрестной связи, второй вывод резистора компенсации пятого устройства компенсации перекрестной связи подсоединен к выходу первого повторителя первого устройства компенсации погрешности коэффициента преобразования, второй вывод резистора компенсации шестого устройства компенсации перекрестной связи подсоединен к выходу первого повторителя второго устройства компенсации погрешности коэффициента преобразования, при этом в каждом устройстве компенсации перекрестной связи выполняется условие:
 ,
,
где k5 - коэффициент перекрестной связи между гироскопическими измерителями угловой скорости;
выходы операционного усилителя и инвертора устройств компенсации погрешности коэффициента преобразования предназначены для подключения к потенциальным входам следящих систем управления рулевыми машинками по соответствующим осям летательного аппарата, выходы вторых повторителей устройств компенсации погрешности коэффициента преобразования предназначены для подключения к выводу нулевого потенциала входов следящих систем управления рулевыми машинками.
В частном случае выполнения бесплатформенного инерциального измерительного преобразователя RB1=R01.
Посредством выполнения трех устройств компенсации погрешности коэффициента преобразования гироскопических измерителей угловой скорости, каждое из которых содержит первый и второй повторители, инвертор, операционный усилитель с возможностью подключения дополнительных входных резисторов и резисторов обратной связи, шести устройств компенсации перекрестной связи, каждое из которых содержит переключатель, резистивный делитель, резистор компенсации, подсоединения устройств компенсации перекрестной связи к устройствам компенсации погрешности коэффициента преобразования обеспечивается получение выходных аналоговых сигналов бесплатформенного инерциального измерительного преобразователя, точно калиброванных по величине и не зависящих от перекрестных связей. В результате расширяются функциональные возможности бесплатформенного инерциального измерительного преобразователя за счет использования его сигналов в следящих системах управления рулевыми машинками летательного аппарата.
На чертеже представлена принципиальная электрическая схема бесплатформенного инерциального измерительного преобразователя.
В бесплатформенном инерциальном измерительном преобразователе к входам вычислительного устройства 1 подключены выходы первого 2', второго 2'' и третьего 2''' акселерометров. В первом гироскопическом измерителе угловой скорости (ГИУС) выход датчика угла 3' гироскопа подключен к входу усилителя 4', к выходу которого подсоединены последовательно соединенные датчик момента 5' гироскопа и нагрузочный резистор RH1. У второго ГИУС выход датчика угла 3'' гироскопа подсоединен к входу усилителя 4'', а к его выходу подключены соединенные последовательно датчик момента 5'' и нагрузочный резистор RH2. У третьего ГИУС к входу усилителя 4''' подключен выход датчика угла 3''' гироскопа. К выходу усилителя 4''' подсоединены соединенные последовательно датчик момента 5''' гироскопа и нагрузочный резистор RH3.
Для построения трех ГИУС могут быть применены либо три двухстепенных гироскопа, либо два трехстепенных гироскопа типа динамически настраиваемых гироскопов (ДНГ). В этом случае в первом ГИУС используются датчик угла и датчик момента по одной измерительной оси одного ДНГ, во втором ГИУС - датчик угла и датчик момента по другой измерительной оси этого же ДНГ, в третьем ГИУС - датчик угла и датчик момента по одной из двух измерительных осей второго ДНГ.
Потенциальный выход первого ГИУС (точка соединения датчика момента 5' с первым выводом нагрузочного резистора RH1) подключен к входам вычислительного устройства 1 и первого повторителя 6', между выходом которого и входом операционного усилителя 7' подключены соединенные последовательно первый входной резистор R'B1 и второй входной резистор R'B2, подключаемый к контактам ХТ1, ХТ2. Между входом и выходом операционного усилителя 7' включены соединенные последовательно первый резистор обратной связи R'O1 и подключаемый к контактам ХТ3, ХТ4 второй резистор обратной связи R'02. К выходу операционного усилителя 7' подсоединен вход инвертора 8'. К выводу нулевого потенциала выхода первого ГИУС (второй вывод нагрузочного резистора RH1) подключен вход второго повторителя 6''. У второго ГИУС к его потенциальному выходу (точка соединения датчика момента 5'' с первым выводом нагрузочного резистора RH2) подключены входы вычислительного устройства 1 и первого повторителя 6''', между выходом которого и входом операционного усилителя 7'' подключены соединенные последовательно первый входной резистор R''B1 и второй входной резистор R''B2, подключаемый к контактам ХТ5, ХТ6. Между входом и выходом операционного усилителя 7'' включены соединенные последовательно первый резистор обратной связи R''01 и второй резистор обратной связи R''02, подключаемый к контактам ХТ7, ХТ8. Вход инвертора 8'' подсоединен к выходу операционного усилителя 7''. Вывод нулевого потенциала выхода второго ГИУС (второй вывод нагрузочного резистора RH2) подключен к входу второго повторителя 6IV.
В третьем ГИУС к его потенциальному выходу (точка соединения датчика момента 5''' с первым выводом нагрузочного резистора RH3) подключены входы вычислительного устройства 1 и первого повторителя 6v, между выходом которого и входом операционного усилителя 7''' подключены соединенные последовательно первый входной резистор R'''B1 и второй входной резистор R'''B2, подключаемый к контактам ХТ9, ХТ10. Между входом и выходом операционного усилителя 7''' включены последовательно соединенные первый резистор обратной связи R'''01 и второй резистор обратной связи R'''02, который подключается к контактам XT11, XT12. К выходу операционного усилителя 7''' подсоединен вход инвертора 8'''. К выводу нулевого потенциала выхода третьего ГИУС (второй вывод нагрузочного резистора RH3) подключен вход второго повторителя 6VI.
Применительно к каждому первому, второму и третьему ГИУС RB2=k1RB1 (где k1 - коэффициент; k1≥0). Если KP/KH=k2>1 (где KP, KH - соответственно реальный и номинальный коэффициенты преобразования каждого из трех ГИУС), то в случае (k2-1)=k1>0 второй входной резистор RB2 подключается к контактам XT1, XT2 для первого ГИУС, к контактам ХТ5, ХТ6 для второго ГИУС, к контактам ХТ9, XT10 для третьего ГИУС.
Если k1=0 или k2<1, то вышеуказанные контакты для подключения вторых входных резисторов RB2 замыкаются между собой.
Применительно к каждому первому, второму и третьему ГИУС R02=k3R01 (где k3 - коэффициент, k3≥0).
Если k2<1, то в случае 
второй резистор обратной связи R02 подключается к контактам ХТ3, ХТ4 для первого ГИУС, к контактам ХТ7, ХТ8 для второго ГИУС, к контактам ХТ11, ХТ12 для третьего ГИУС. Если k3=0 или k2>1, то вышеуказанные контакты для подключения вторых резисторов обратной связи R02 замыкаются между собой.
Выход "а" операционного усилителя 7' в первом устройстве компенсации погрешности коэффициента преобразования ГИУС подключен к размыкающему контакту переключателя SA1 в первом устройстве компенсации перекрестной связи и к размыкающему контакту переключателя SA2 во втором устройстве компенсации перекрестной связи. Выход "б" инвертора 8' подсоединен к замыкающим контактам переключателей SA1, SA2.
В первом устройстве компенсации перекрестной связи переключающий контакт переключателя SA1 подключен на вход состоящего из резисторов R'Д1 и R'Д2 резистивного делителя, к выходу которого подсоединен первый вывод резистора компенсации RK1, подключенного своим вторым выводом к выходу "в" первого повторителя 6''' во втором устройстве компенсации погрешности коэффициента преобразования ГИУС.
У второго устройства компенсации перекрестной связи переключающий контакт переключателя SA2 подсоединен к входу содержащего резисторы R''Д1 и R''Д2 резистивного делителя, выход которого подключен к первому выводу резистора компенсации RK2, к второму выводу которого подключен выход "г" первого повторителя 6v третьего устройства компенсации погрешности коэффициента преобразования ГИУС.
К выходу "д" операционного усилителя 7'' во втором устройстве компенсации погрешности коэффициента преобразования ГИУС подключены размыкающие контакты переключателей SA3 и SA4, к замыкающим контактам которых подсоединен выход "е" инвертора 8''.
У третьего устройства компенсации перекрестной связи переключающий контакт переключателя SA3 подключен к входу состоящего из резисторов R'''Д1 и R'''Д2 резистивного делителя, выход которого подсоединен к первому выводу резистора компенсации RK3, соединенного своим вторым выводом с выходом "ж" первого повторителя 6' в первом устройстве компенсации погрешности коэффициента преобразования ГИУС. В четвертом устройстве компенсации перекрестной связи к переключающему контакту переключателя SA4 подсоединен вход состоящего из резисторов RIV Д1 и RIV Д2 резистивного делителя. Резистор компенсации RK4 первым своим выводом подсоединен к выходу резистивного делителя, а вторым своим выводом - к выходу "г" первого повторителя 6v в третьем устройстве компенсации перекрестной связи.
Выход "з" операционного усилителя 7''' третьего устройства компенсации погрешности коэффициента преобразования ГИУС подсоединен к размыкающим контактам переключателей SA5 и SA6, к замыкающим контактам которых подключен выход "и" инвертора 8'''.
В пятом устройстве компенсации перекрестной связи переключающий контакт переключателя SA5 соединен со входом резистивного делителя, состоящего из резисторов Rv Д1, Rv Д2. К выходу резистивного делителя подключен первый вывод резистора компенсации RK5, второй вывод которого соединен с выходом "ж" первого повторителя 6' в первом устройстве компенсации погрешности коэффициента преобразования.
У шестого устройства компенсации перекрестной связи переключающий контакт переключателя SA6 подключен к входу состоящего из резисторов RVI Д1, RVI Д2 резистивного делителя, к выходу которого подсоединен первый вывод резистора компенсации RK6. К второму выводу резистора компенсации RK6 подключен выход "в" первого повторителя 6''' во втором устройстве компенсации погрешности коэффициента преобразования ГИУС.
Применительно ко всем шести устройствам компенсации перекрестной связи
 ,
,
(где n - коэффициент деления резистивного делителя);
RK=k4RB1, где k4 - коэффициент.
При этом
 ,
,
где k5 - коэффициент перекрестной связи между измерительными осями ГИУС.
Бесплатформенный инерциальный измерительный преобразователь работает следующим образом. Поступающие с выходов акселерометров 2', 2'', 2''' и с выходов первого, второго и третьего ГИУС аналоговые сигналы вычислительное устройство 1 преобразует в цифровые коды и по ним вычисляет координаты объекта, в котором используется бесплатформенный инерциальный измерительный преобразователь. Одновременно с выходов первого, второго и третьего ГИУС аналоговые сигналы подаются на входы соответственно первого, второго и третьего устройств компенсации погрешности коэффициента преобразования ГИУС. Так, например, аналоговой сигнал с потенциального выхода первого ГИУС подается на вход первого повторителя 6', с выхода которого он поступает на вход операционного усилителя 7' через первый входной резистор R'B1 и второй входной резистор R'B2. который ставится на контакты XT1, ХТ2 в том случае, если KP1/KH=k'2>1, где KP1 - реальный коэффициент преобразования первого ГИУС, KH - номинальный коэффициент преобразования, одинаковый для всех ГИУС, k'2 - коэффициент, индивидуальный для первого ГИУС.
Тогда R'B2=k'1R'B1, где k'1 - коэффициент, индивидуальный для первого ГИУС. При этом k'1=(k'2-1). В этом случае контакты ХТ3, ХТ4 закорочены. Если k'2=0 или k'2<1, то вместо второго входного резистора R'B2 на контакты ХТ1, ХТ2 ставится перемычка.
Если k'2<1, то на контактах ХТ3, ХТ4 устанавливается второй резистор обратной связи R'02=k'3R'01, где k'3 - коэффициент, индивидуальный для первого ГИУС.
При этом  .
.
В результате преобразование угловой скорости ω1 в первом ГИУС производится с коэффициентом преобразования КН. Аналогичным образом угловая скорость ω2 во втором ГИУС и угловая скорость ω3 в третьем ГИУС преобразуются с коэффициентом преобразования КН.
В первом устройстве компенсации перекрестной связи на резистивный делитель из резисторов R'Д1, R'Д2 с коэффициентом деления n подается напряжение либо с выхода "а" операционного усилителя 7', либо с выхода "б" инвертора 8' в зависимости от знака коэффициента перекрестной связи k'5 между первым и вторым ГИУС, что обеспечивается соответствующим положением переключателя SA1. С подключенного к выходу резистивного делителя резистора компенсации RK1=k'4R''B1 (k'4 - коэффициент) напряжение компенсации подается на вход "б" операционного усилителя 7''. При этом

где  и
и 
С резистора компенсации RK2=k''4R'''B1 на вход "г" третьего устройства компенсации погрешности коэффициента преобразования ГИУС подается напряжение компенсации, учитывающее перекрестную связь между первым и третьим ГИУС с коэффициентом перекрестной связи k''5. При этом

где  и
и 
Таким образом устраняются погрешности от перекрестных связей между первым и вторым ГИУС, между первым и третьим ГИУС. Аналогичным образом минимизируются погрешности от перекрестных связей между вторым и первым ГИУС, между вторым и третьим ГИУС, между третьим и первым ГИУС, между третьим и вторым ГИУС.
В результате компенсации погрешности коэффициента преобразования первого ГИУС и введения компенсации перекрестных связей между вторым и первым ГИУС, между третьим и первым ГИУС напряжение на выходе "а" операционного усилителя 7' пропорционально KHω1, а напряжение на выходе "б" инвертора 8' пропорционально (-KHω1). Вследствие аналогичного преобразования выходных сигналов второго и третьего ГИУС напряжение на выходе "д" операционного усилителя 7'' пропорционально КНω2, напряжение на выходе "е" инвертора 8'' пропорционально (-KHω1), напряжение на выходе "з" операционного усилителя 7''' пропорционально KHω3, напряжение на выходе "и" инвертора 8''' пропорционально (-KHω3).
Дифференциальный выход бесплатформенного инерциального измерительного преобразователя, образованный выходами "а", "б" первого устройства компенсации погрешности коэффициента преобразования ГИУС, обеспечивает выдачу на вход следящей системы управления рулевыми машинками по одной из осей летательного аппарата сигнала вдвое большей величины по сравнению с сигналом, обеспечивающимся с линейных выходов "а", "к" или "б", "к". Образованный выходами "д", "е" второго устройства компенсации погрешности коэффициента преобразования ГИУС дифференциальный выход предназначен для выдачи сигнала на вход следящей системы управления рулевыми машинками по второй оси летательного аппарата. Для управления рулевыми машинками летательного аппарата по третьей оси образован дифференциальный выход на выходах "з", "и" третьего устройства компенсации погрешности коэффициента преобразования ГИУС.
Дифференциальные выходы обеспечивают повышение точности следящих систем управления рулевыми машинками за счет повышения отношения сигнал-шум.
В зависимости от построения следящих систем управления рулевыми машинками в них могут использоваться как дифференциальные, так и линейные выходы бесплатформенного инерциального измерительного преобразователя.
Все выходы бесплатформенного инерциального измерительного преобразователя точно калиброваны для выдачи аналогового сигнала с одинаковым коэффициентом преобразования КН. При этом в аналоговых сигналах отсутствуют составляющие, вызванные перекрестными связями между ГИУС.
Источники информации
1. Патент РФ №2011169, кл. G01C 21/00. Бесплатформенная инерциальная навигационная система. 1994 г.
2. Патент РФ №2123665, кл. G01C 21/00. Бесплатформенная инерциальная навигационная система подводного аппарата. 1998 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Функциональный преобразователь | 1978 |
|
SU781838A1 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2497077C1 |
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |
| Устройство для измерения температуры | 1983 |
|
SU1154553A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| Преобразователь комплексных сопротивлений и проводимостей в напряжение | 1991 |
|
SU1827646A1 |
Изобретение относится к средствам навигации и управления подвижными объектами, а именно к инерциальным навигационным системам. В бесплатформенном инерциальном измерительном преобразователе, содержащем три акселерометра, три гироскопических измерителя угловой скорости (ГИУС), вычислительное устройство, устройства компенсации погрешностей, выполнены устройства компенсации погрешности коэффициента преобразования каждого ГИУС, устройства компенсации перекрестной связи между каждым из ГИУС. Каждое устройство компенсации погрешности коэффициента преобразования ГИУС содержит первый и второй повторители, операционный усилитель, инвертор и образует дифференциальный выход для следящих систем управления рулевыми машинками летательного аппарата. Каждое устройство компенсации перекрестной связи содержит переключатель, резистивный делитель и подключенный к выходу резистивного делителя резистор компенсации. Устройства компенсации перекрестной связи включены между каждым из устройств компенсации погрешности коэффициента преобразования ГИУС. Техническим результатом изобретения является расширение функциональных возможностей бесплатформенного инерциального измерительного преобразователя. 1 з.п. ф-лы, 1 ил.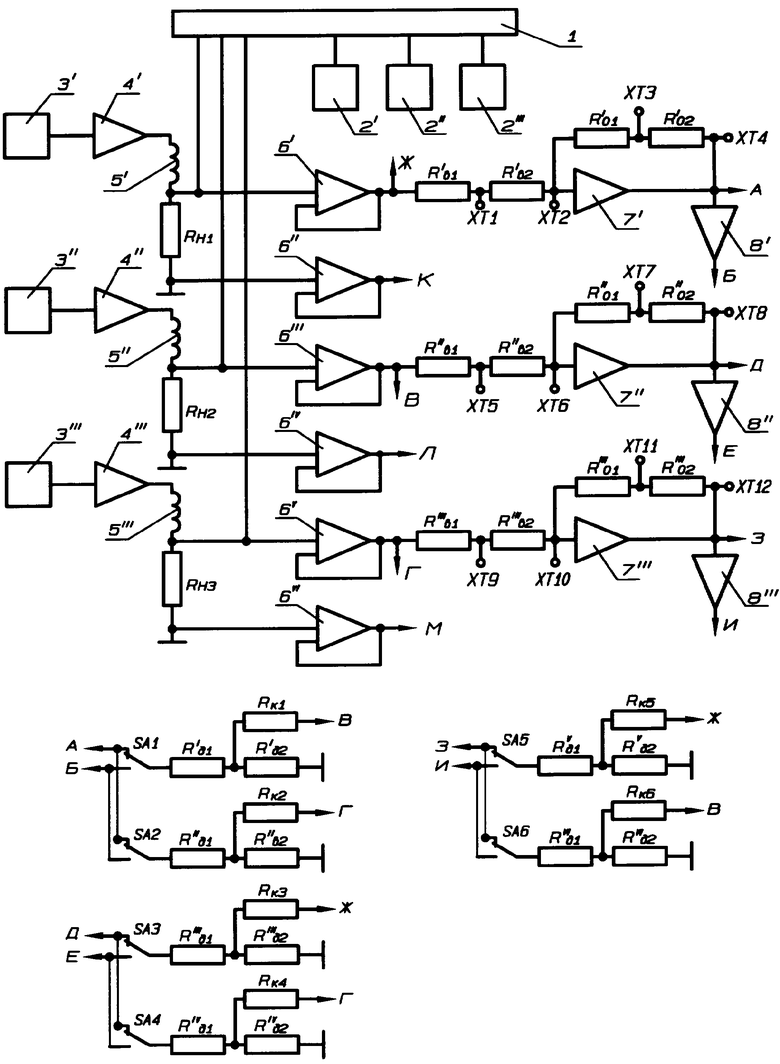
1. Бесплатформенный инерциальный измерительный преобразователь, содержащий три акселерометра, первый, второй и третий гироскопические измерители угловой скорости, вычислительное устройство, устройства компенсации погрешностей, подключенные к выходам гироскопических измерителей угловой скорости, отличающийся тем, что выполнены первое, второе и третье устройства компенсации погрешности коэффициента преобразования соответственно для первого, второго и третьего гироскопических измерителей угловой скорости, первое, второе, третье, четвертое, пятое и шестое устройства компенсации перекрестной связи между гироскопическими измерителями угловой скорости, каждое устройство компенсации погрешности коэффициента преобразования гироскопического измерителя угловой скорости содержит подключенный к потенциальному выходу гироскопического измерителя угловой скорости первый повторитель, подключенный к его выходу операционный усилитель с первым входным резистором Rв1 и первым резистором обратной связи R01, подключенный к выходу операционного усилителя инвертор, второй повторитель, подсоединенный к выводу нулевого потенциала выхода гироскопического измерителя угловой скорости, в операционном усилителе предусмотрено подключение второго входного резистора Rв2=k1Rв1 (где k1 - коэффициент; k1≥0), если Kp/Kн=k2>1 (где Kp, Kн - соответственно реальный и номинальный коэффициенты преобразования данного гироскопического измерителя угловой скорости, k2 - коэффициент), при этом k1=(k2-1); в операционном усилителе предусмотрено подключение последовательно с первым резистором обратной связи второго резистора обратной связи R02=k3R01 (где k3 - коэффициент, k3≥0), если k2<1, при этом  , каждое устройство компенсации перекрестной связи содержит переключатель на два положения, подключенный к его переключающему контакту резистивный делитель с коэффициентом деления n, резистор компенсации RK=k4Rв1 (где k4 - коэффициент), который подключен первым своим выводом к выходу резистивного делителя, выход операционного усилителя в первом устройстве компенсации погрешности коэффициента преобразования подключен к размыкающим контактам переключателей первого и второго устройств компенсации перекрестной связи, выход инвертора первого устройства компенсации погрешности коэффициента преобразования подключен к замыкающим контактам переключателей первого и второго устройств компенсации перекрестной связи, второй вывод резистора компенсации в первом устройстве компенсации перекрестной связи подсоединен к выходу первого повторителя во втором устройстве компенсации погрешности коэффициента преобразования, второй вывод резистора компенсации во втором устройстве компенсации перекрестной связи подключен к выходу первого повторителя в третьем устройстве компенсации погрешности коэффициента преобразования, выход операционного усилителя во втором устройстве компенсации погрешности коэффициента преобразования подключен к размыкающим контактам переключателей третьего и четвертого устройств компенсации перекрестной связи, выход инвертора второго устройства компенсации погрешности коэффициента преобразования подсоединен к замыкающим контактам переключателей третьего и четвертого устройств компенсации перекрестной связи, второй вывод резистора компенсации в третьем устройстве компенсации перекрестной связи подключен к выходу первого повторителя в первом устройстве компенсации погрешности коэффициента преобразования, второй вывод резистора компенсации в четвертом устройстве компенсации перекрестной связи подсоединен к выходу первого повторителя третьего устройства компенсации погрешности коэффициента преобразования, выход операционного усилителя третьего устройства компенсации погрешности коэффициента преобразования подсоединен к размыкающим контактам переключателей в пятом и шестом устройствах компенсации перекрестной связи, выход инвертора третьего устройства компенсации погрешности коэффициента преобразования подключен к замыкающим контактам переключателей пятого и шестого устройств компенсации перекрестной связи, второй вывод резистора компенсации пятого устройства компенсации перекрестной связи подсоединен к выходу первого повторителя первого устройства компенсации погрешности коэффициента преобразования, второй вывод резистора компенсации шестого устройства компенсации перекрестной связи подсоединен к выходу первого повторителя второго устройства компенсации погрешности коэффициента преобразования, при этом в каждом устройстве компенсации перекрестной связи выполняется условие:
, каждое устройство компенсации перекрестной связи содержит переключатель на два положения, подключенный к его переключающему контакту резистивный делитель с коэффициентом деления n, резистор компенсации RK=k4Rв1 (где k4 - коэффициент), который подключен первым своим выводом к выходу резистивного делителя, выход операционного усилителя в первом устройстве компенсации погрешности коэффициента преобразования подключен к размыкающим контактам переключателей первого и второго устройств компенсации перекрестной связи, выход инвертора первого устройства компенсации погрешности коэффициента преобразования подключен к замыкающим контактам переключателей первого и второго устройств компенсации перекрестной связи, второй вывод резистора компенсации в первом устройстве компенсации перекрестной связи подсоединен к выходу первого повторителя во втором устройстве компенсации погрешности коэффициента преобразования, второй вывод резистора компенсации во втором устройстве компенсации перекрестной связи подключен к выходу первого повторителя в третьем устройстве компенсации погрешности коэффициента преобразования, выход операционного усилителя во втором устройстве компенсации погрешности коэффициента преобразования подключен к размыкающим контактам переключателей третьего и четвертого устройств компенсации перекрестной связи, выход инвертора второго устройства компенсации погрешности коэффициента преобразования подсоединен к замыкающим контактам переключателей третьего и четвертого устройств компенсации перекрестной связи, второй вывод резистора компенсации в третьем устройстве компенсации перекрестной связи подключен к выходу первого повторителя в первом устройстве компенсации погрешности коэффициента преобразования, второй вывод резистора компенсации в четвертом устройстве компенсации перекрестной связи подсоединен к выходу первого повторителя третьего устройства компенсации погрешности коэффициента преобразования, выход операционного усилителя третьего устройства компенсации погрешности коэффициента преобразования подсоединен к размыкающим контактам переключателей в пятом и шестом устройствах компенсации перекрестной связи, выход инвертора третьего устройства компенсации погрешности коэффициента преобразования подключен к замыкающим контактам переключателей пятого и шестого устройств компенсации перекрестной связи, второй вывод резистора компенсации пятого устройства компенсации перекрестной связи подсоединен к выходу первого повторителя первого устройства компенсации погрешности коэффициента преобразования, второй вывод резистора компенсации шестого устройства компенсации перекрестной связи подсоединен к выходу первого повторителя второго устройства компенсации погрешности коэффициента преобразования, при этом в каждом устройстве компенсации перекрестной связи выполняется условие:
где k5 - коэффициент обратной связи между гироскопическими измерителями угловой скорости;
выходы операционного усилителя и инвертора устройств компенсации погрешности коэффициента преобразования предназначены для подключения к потенциальным входам следящих систем управления рулевыми машинками по соответствующим осям летательного аппарата, выходы вторых повторителей устройств компенсации погрешности коэффициентов преобразования предназначены для подключения к выводу нулевого потенциала входов следящих систем управления рулевыми машинками.
2. Бесплатформенный инерциальный измерительный преобразователь по п.1, отличающийся тем, что Rв1=R01.
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ПОДВОДНОГО АППАРАТА | 1997 |
|
RU2123665C1 |
| ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2000 |
|
RU2184937C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2001 |
|
RU2199755C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1991 |
|
RU2090463C1 |

