По основному авт. св. №171042 известно устройство для дистанционного управления шахтной подъемной машиной, выполненное в виде набора индуктивных датчиков, расположенных вдоль ствола шахты, и магнита, установленного на боковой стенке кабины и перемещаемого в положение взаимодействия с указанными датчиками. В этом устройстве каждой фиксированной остановке соответствует только один датчик, выдающий соответственно один командный импульс в схему управления. Такая система управления не обеспечивает защиту от ложного командного сигнала (помехи), что снижает надежность работы устройства.
Предложенное устройство отличается тем, что на боковой стенке кабины расположен набор магнитов, соединенных с кнопочным шифратором, служащим для перемещения магнитов в рабочее положение в комбинациях, соответствующих определенным фиксированным остановкам. При этом команда управления, поступающая в схему, состоит из нескольких адресных и командного импульсов, и комбинация и последовательность этих импульсов, соответствующая каждой данной определенной фиксированной остановке, исключает возможность подачи ложной команды.
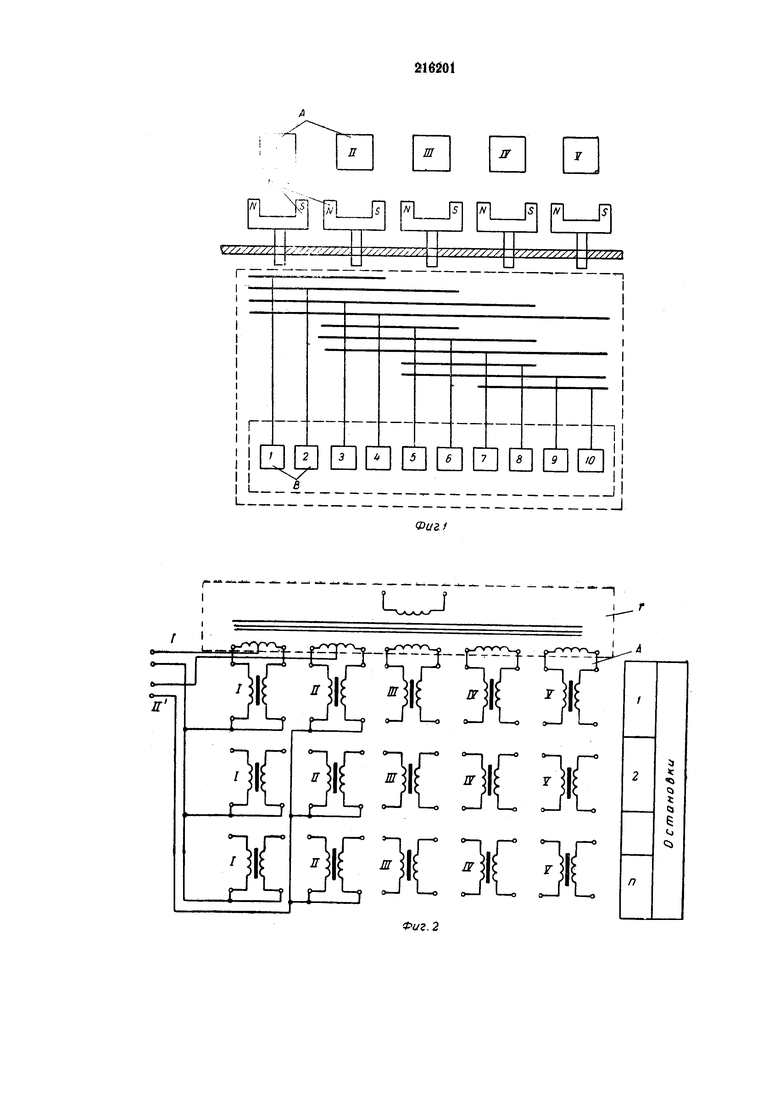
На фиг. 1 приведена схема части описываемого устройства; на фиг. 2 - электрическая схема включения датчиков.
Вдоль ствола шахты в местах, соответствующих фиксированным остановкам, расположены индуктивные датчики A (I, II, III, IV, V). На боковой стенке кабины установлен набор магнитов Б, соединенных с шифратором В с кнопками 1-10.
При нажатии одной из этих кнопок, соответствующей определенной фиксированной остановке (определенному этажу), в рабочее положение выдвигается комбинация постоянных магнитов Б, соответствующая данному этажу. Этому же этажу соответствует определенная комбинация датчиков А, укрепленных в стволе шахты.
Каждый из датчиков I-V, попадая в магнитное поле, создаваемое магнитом Б, выдает кодированный сигнал в схему управления.
Все датчики А (I-V), расположенные на 1-ом, 2-ом … n-ом этажах (см. фиг. 2), получают питание от трансформаторов Т и соединены между собой в соответствии с принятым способом кодирования.
Для придания датчикам нечувствительности к находящимся поблизости ферромагнитным предметам датчики выполнены в виде дросселей переменного тока с двухстержневыми замкнутыми сердечниками и двумя идентичными обмотками, расположенными по одной на каждом стержне. Обмотки имеют среднюю точку и включены в сбалансированную мостовую схему, разбаланс которой и, следовательно, появление сигнала происходит только при подмагничивании сердечников датчиков постоянным магнитным полем.
При взаимодействии выдвинутого в рабочее положение магнита Б с датчиком I выходной сигнал поступает в схему управления с зажимом I′, при его взаимодействии с датчиком II - с зажимом II′ и так далее.
Одновременно датчики подмагничиваются в соответствии со схемой кодирования, и в систему управления поступает соответствующая комбинация импульсов.
На оба ярма-сердечника датчика можно установить стальные щеки, увеличивающие зону взаимодействия датчика и магнита и обеспечивающие срабатывание датчика при неточной остановке кабины.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНОЙ | 1965 |
|
SU171042A1 |
| ЛИФТ С ЭЛЕКТРОПРИВОДОМ ПОДЪЕМА ЭЛЕКТРИЧЕСКИМ ЛИНЕЙНЫМ ДВИГАТЕЛЕМ | 2016 |
|
RU2630011C2 |
| ЭЛЕКТРОПРИВОД ЛЕБЕДКИ ШАХТНОГО ПОДЪЕМНИКА | 2018 |
|
RU2704387C2 |
| СПОСОБ ТОЧНОЙ ОСТАНОВКИ ПОЛА КАБИНЫ ЛИФТА НА УРОВНЕ ПОСАДОЧНОЙ ПЛОЩАДКИ | 2001 |
|
RU2202508C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МАШИНЫ | 2002 |
|
RU2234185C1 |
| Устройство для кнопочного управления электрическим подъемником | 1937 |
|
SU58580A1 |
| Устройство кнопочного управления многоэтажными подъемниками | 1933 |
|
SU44508A1 |
| Устройство безопасности работы лифта | 1987 |
|
SU1643392A1 |
| Электрический подъемник | 1937 |
|
SU53339A1 |
| Шахтный подъемник | 1980 |
|
SU1008134A1 |
Устройство для дистанционного управления шахтной подъемной машиной по авт. св. №171042, отличающееся тем, что, с целью исключения возможности подачи ложного сигнала в систему управления, на боковой стенке кабины расположен набор магнитов, соединенных с кнопочным шифратором, служащим для перемещения указанных магнитов в рабочее положение в комбинациях, соответствующих определенным фиксированным остановкам.
