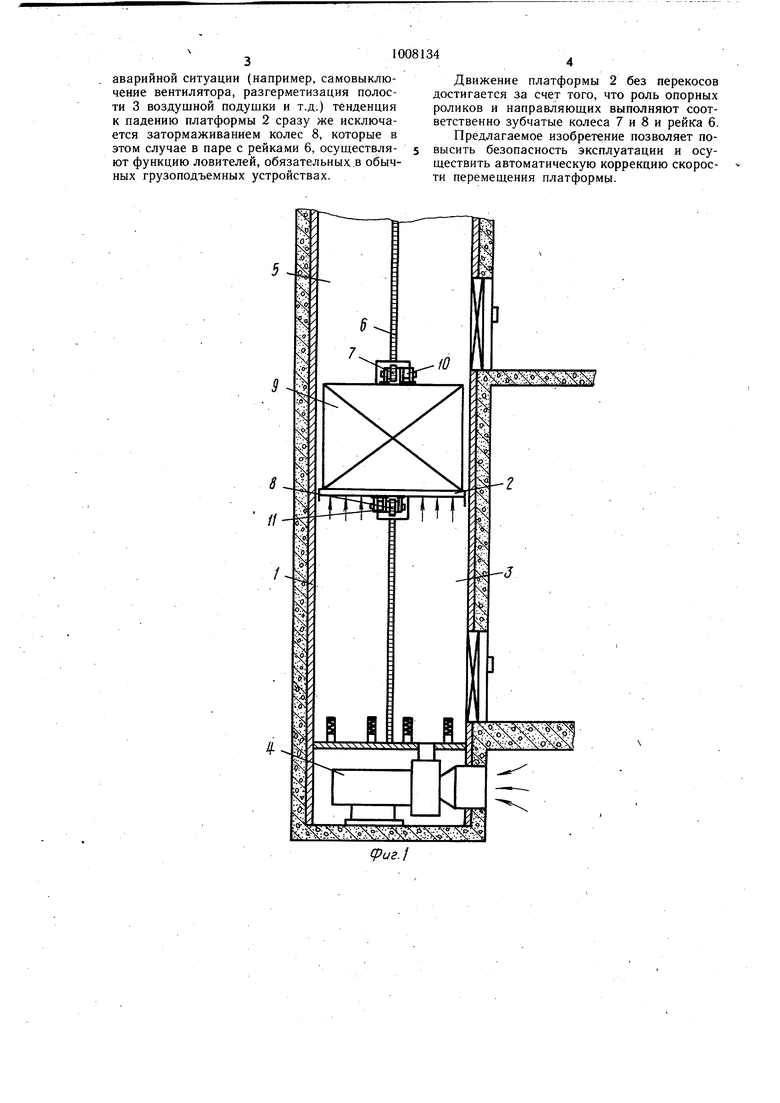
со д;; Изобретение относится к подъемно-транспортному машиностроению, в частности к шахтным подъемникам на воздушной подушке. Известен шахтный подъемник, содержаш,ий шахту с направляюш,ими, грузовую платформу, перемещаюш,уюся вдоль этой шахты по направляюш,им, посредством вентилятора с приводным двигателем для нагнетания воздуха в шахту под грузовую платформу и систему управления перемещением этой платформы 1. Недостатком является то, что в устройстве отсутствует жесткая связь грузонесущей платформы с опорной поверхностью, например стенками шахты, верхними или нижним основанием, что снижает безопасность его эксплуатации. Цель изобретения - повышение безопасности эксплуатации шахтного подъемника путем автоматической коррекции скорости перемещения платформы. Поставленная цель достигается тем, что в щахтном подъемнике, содержащем шахту с направляющими, и грузовую платформу, перемещающуюся вдоль этой щахты по нанравляющим посредством вентилятора с приводным двигателем для нагнетания воздуха в шахту под грузовую платформу, и систему управления перемещением этой платформы, направляющие выполнены в виде зубчатых реек, а грузовая платформа снабжена зубчатыми колесами, взаимодействующими с этими рейками и размещенными попарно по обеим сторонам грузовой платформы, причем одно из колес каждой пары установлено на оси, а другое - на валу, при этом система управления перемещением грузовой платформы снабжена подсистемой формирования закона ее движения и подсистемой обнаружения аварийных ситуаций грузовой платформь при превышении скорости ее движения, а также снабжена тормозным механизмом, соединенным с валом, а обе упомянутые подсистемы подсоединены к тормозному механизму параллельно. На фиг. 1 изображен щахтный подъемник, общий вид; на фиг. 2 - принципиальная схема системы управления. Шахтный подъемник содержит шахту 1, установленную в ней с возможностью перемещения грузовую платформу 2, полость 3 образующейся воздушной подушки, подключена к вентилятору 4. В шахте 1 имеются направляющие, выполненные в виде установленных вдоль противоположных стенок 5 шахты -1 зубчатых реек 6, взаимодействующих с зубчатыми колесами 7 и 8, расположенными на кабине 9 грузовой платформы 2 попарно. При этом одни из упомянутых колес 7 установлены на осях, вращающихся свободно и соединенных с тахометром 10, а другие колеса 8 - на валах, соединенных с тормозным механизмом 11. Последний подключен к подсистеме 12 формирования закона движения, включающей блок 13 сравнения, связанный с тахометром 10 и блок 14 формирования закона движения, который связан с кнопкой 15 этажа назначения, располагающейся на пульте управления внутри кабины 9, и с кнопкой 16 этажа вызова кабины 9, располагающейся на каждом уровне, а также датчиком 17 этажа начала движения. Тормозной механизм 11 связан с подсистемой 18 об;.аружения аварийных ситуаций. Подсистемы 12 и 18 являются автономными и подключены к тормозному механизму параллельно. Устройство работает следующим образом. После окончания погрузочно-разгрузочных работ (например, на нижнем уровне) закрывают двери и нажимают кнопку 16 этажа назначения. При этом подается сигнал на включение вентилятора 4, а также в блок 14 формирования закона движения подсистемы 12. Кроме того, в блок 14 подается сигнал от датчика 17 этажа начала движения, после чего в нем формируется закон изменения теоретической скорости движения платформы 2 до этажа назначения. Аналогично происходит формирование закона изменения скорости в блоке 14, при вызове платформы 2 на каком-либо уровне при нажатии кнопки 16 этого-уровня. Под действием избыточного давления, создаваемого вентилятором 4 в полости 3 воздушной подущки, платформа 2 начинает перемещаться вверх. Зубчатые колеса 7 и 8, расположенные на кабине 9 и взаимодействующие с зубчатыми рейками 6, установленными вдоль противоположных стенок 5 щахты 1, начинают вращаться, при этом подается непрерывный сигнал в блок 13 сравнения от тахометра 10, связанного с колесами 7, и блока 14 формирования закона движения, где происходит сравнение в каждый момент времени теоретической и фактической скор движения платформы-кабины 2. Если возникает рассогласование в скоростях, то -разностный сигнал от блока 13 подается на исполнительный тормозной механизм 11, который вносит поправку в скорость движения платформы 2 путем изменения наriгрузки на валы колес 8, и, как следствие, сопротивления их вращению. При достижении платформой 2 этажа назначения производится ее остановка и фиксация, после чего выключается вентилятор 4 и производятся погрузочно-разгрузочные работы. После окончания погрузочно-разгрузочных работ закрываются двери и производится дальнейшая транспортировка грузов. Движение вверх осуществляется аналогичным образом. Движение вниз происходит без включения вентилятора 4. При этом платформа 2 опускается плавно и без перегрузок, ее проваливание до определенной глубины не происходит. При возникновении
аварийной ситуации (например, самовыключение вентилятора, разгерметизация полости 3 воздушной подушки и т.д.) тенденция к падению платформы 2 сразу же исключается затормаживанием колес 8, которые в этом случае в паре с рейками 6, осушествляют функцию ловителей, обязательных .в обычных грузоподъемных устройствах.
9
Движение платформы 2 без перекосов достигается за счет того, что роль опорных роликов и направляюших выполняют соответственно зубчатые колеса 7 и 8 и рейка 6.
Предлагаемое изобретение позволяет повысить безопасность эксплуатации и осушествить автоматическую коррекцию скорости перемещения платформы
| название | год | авторы | номер документа |
|---|---|---|---|
| Шахтный подъемник на воздушной подушке | 1981 |
|
SU1028591A1 |
| МНОГОЭТАЖНЫЙ МЕХАНИЗИРОВАННЫЙ ГАРАЖ-СТОЯНКА | 2000 |
|
RU2179616C1 |
| ПОДЪЕМНИК АВТОМОБИЛЕЙ | 2000 |
|
RU2169692C1 |
| Лифт грузопассажирский рудничный | 2020 |
|
RU2784651C1 |
| АВТОМАТИЧЕСКИЙ МНОГОЭТАЖНЫЙ ГАРАЖ-ПЕНАЛ | 2004 |
|
RU2324040C2 |
| ШАХТНЫЙ ПОДЪЕМНИК | 2011 |
|
RU2585132C2 |
| Подъемник | 1983 |
|
SU1189776A1 |
| Стопорное устройство подъемника | 1977 |
|
SU737341A1 |
| ОСТАНОВОЧНО-ПУСКОВОЙ МЕХАНИЗМ ДЛЯ ПОДЪЕМНИКОВ | 1928 |
|
SU9819A1 |
| Устройство для перемещения шахтных вагонеток | 1979 |
|
SU861271A1 |

ШАХТНЫЙ ПОДЪЕМНИК, содержащий шахту с направляющими, грузовую платформу, перемещающуюся вдоль этой шахты по направляющим посредством вентилятора с приводным двигателем для нагнетания воздуха в шахту под грузовую платформу, и систему управления перемеV3 ;«ivj f щением этой платформы, отличающийся тем, что, с целью повышения безопасности его эксплуатации путем автоматической коррекции скорости перемещения платформы, направляющие выполнены в виде зубчатых реек, а грузовая платформа снабжена зубчатыми колесами, взаимодействующими с этими рейками и размещенными попарно по обеим сторонам грузовой платформы, причем одно из колес каждой пары установлено на оси, а другое - на валу, при этом система управления перемещением грузовой платформы снабжена подсистемой формирования закона ее движения и подсистемой обнаруживания аварийных ситуаций грузовой платформы при превышении скорости ее движения, а также снабжена тормозным механизмом, соединенным с валом, а обе i упомянутые подсистемы подсоединены к (Л тормозному механизму параллельно.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шахтный подъемник | 1978 |
|
SU765178A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
