Изобретение относится к устройствам для дистанционного управления подъемными машинами и сигнализации из кабины подъемника в маслинное отделение без применения соединительных кабелей между кабиной и машинным отделением лодъемйика.
В известных устройствах для дистанционного управления шахтными подъемными машинами без применения соединительных кабелей между кабиной и машинным отделением используются дроссельные датчики с разомкнутыми сердечниками и стальные шунты, взаимодействуюш,ие с этими датчиками и установленные в стволе подъемника. Такие устройства не позволяют управлять подъемной машиной непосредственно из кабины подъемника. Кроме того, применяемые в известных устройствах индуктивные датчики чувствительны к находяихимся вблизи ферромагнитным телам, что снижает надежность работы этих устройств.
Предложенное устройство отличается от известных те,м, что ОНо выполнено в виде набора индуктивных датчиков, раюположенных вдоль ствола шахты, и перемеш,аемого стержневого магнита, размешенного на внешней стороне кабины подъемника и механически соединенного с ручкой управления, расположенной внутри кабины и, следовательно, доступной оператору, находяш,емуся в этой кабине.
В устройстве, предназначенном только для подачи сигнализации из кабины в машинное отделение, ручка и соединенный с ней магнит имеют лишь два фиксированных положения,
соответствуюших наличию и отсутствию сигнала, индуктивные датчики размешены одинаково на всех горизонтах вдоль ствола шахты. В устройстве дистанционного управления подъемной машиной индуктивные датчики,
установленные на различных горизонтах шахты, расиоложены с некоторым Сдвигом друг относительно друга и относительно .кабины подъемника в момент подхода ее к соответствуюшему горизонту, а ручка и постоянный
магнит имеют фиксированные положения, число которых соответствует горизонтов шахты подъемной машины. Путем изменения положения ручки изменяется в пространстве положение иолюсов постоянного магнита,
вследствие чего в зоне действия создаваемого им магнитного поля при подходе кабины к соответствующему горизонту оказывается лишь соответствуюшпй этому положению датчик этого горизонта. Получаемые от этих датчиков
сигналы воспринимаются в машинном помеигении, и соответствуюидие им команды исполняются подъемной машиной.
де дросселей переменного тока с двухстержневыми зам кнутыми сердечниками и обмоткой с выведенной средней точ-кой, равномерно размещенной на обоих -стержнях и .включенной в сбалансированную мостовую схему, разбаланс которой и, следовательно, появление сигнала происходит только при лодмагничи.вании сердечников датчиков .постоянным магнитным полем. На оба ярма сердечника датчика могут быть установлены стальные щеки, увеличивающие зону взаимодействия датчика и магнита и обеспечивающие срабатывание датчика при неточной остановке кабины.
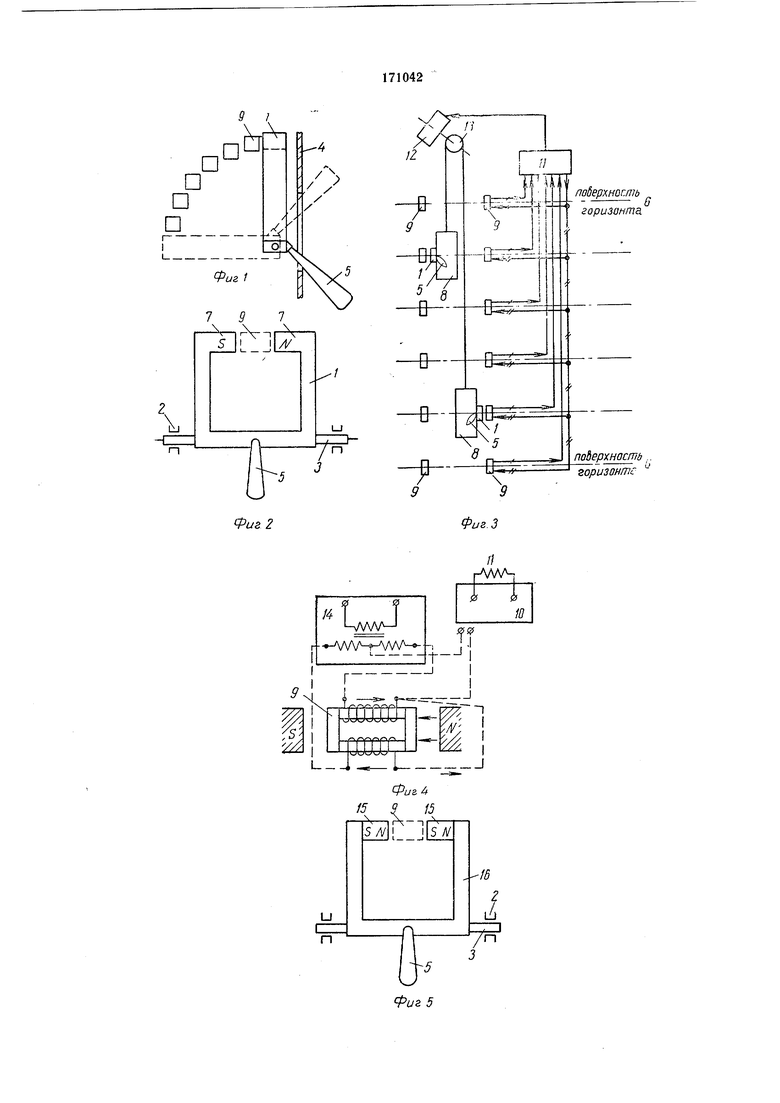
На фиг. 1 показан пост управления устройства, вид сбоку вдоль стенки .кабины подъемника; на фиг. 2 - пост управления устройства со стороны ручки управления без стенки кабины подъемника; на фиг. 3 - блок-схема дистанционного управления подъемной машины; на фиг. 4 - принципиальная .схема индуктивного датчика и его включения в схему устройства; на фиг. 5 - вариант стержневого магнита, в котором уменьшено раосеива-ние магнитного потока.
Подвижной постоянный магнит Л укрепленный в подшипн1И1ках 2 на цапфах 3, установлен на наружной стенке 4 кабины таким образом, что ручка 5 управления им по-мещается внутри кабины. Путем поворота ручки на Некоторый угол, определенный для каждого горизонта 6, постоянный магнит устанавливается в одно из положений и фиксируется. В этом положении его полюса 7 при проходе кабиной 8 соответствующего горизонта окажутся во взаимодействии с индуктивным датчиком 9 этого горизонта. Число фиксированных положений ручки соответствует числу горизонтов.
Индуктивный датчик, представляющий собой дроссель переменного тока на двухстержневом сердечнике с равным числом витков на каждом стержне, подает сигнал, принимаемый усилителе.м-преобразователем JO. Сигнал с усилителя подается на исполнительное выходное реле 11, передающее соответствующую команду подъемной мащине 12, приводящей в движение, подъемный барабан (щкив) 13.
Все индуктивные датчики лолучают питание от трансформатора 14, вторичная обмотка которого имеет вывод средней точки. Оба плеча вторичной обмотки трансформатора 14 вместе с двумя полуобмотками индуктивного датчика Я также имеющих выведенную среднюю точку, представляют собой сбалансированный мост переменного тока, в диагонали которого включен вход усилителя 10.
При поладании сердечника индуктивного датчика в лмагнитное поле постоянного магнита баланс моста переменного тока нарущается, между средними точками вторичной обмотки трансформатора и обмотки индуктивного
датчика появляется переменное напряжение сигнала, преобразуемое и усиливаемое усилителем-преобразователем.
Для увеличения зоны взаимодействия индужтивных датчиков с постоянным магнитом,
что может оказаться необходимым для повышения четкости работы устройства управления при неточной остановке кабины, а также для увеличения длительности имнульса при проходе кабин датчика, на оба ярма сердечника каждого индуктивного датчика могут быть установлены дополнительные стальные щеки, как бы удлиняющие ярма.
Конструкция магнита, изображенная на фиг. 5, предусматривающая применение двух
постоянных .магнитов 15 и подковообразного мапнитопровода 16, .позволяет уменьшить рассеивание магнитного потока, что важно в устройствах, предназначенных для дистанционного управления подъемными машинами.
Предмет изобретения
Устройство для дистанционного управления щахтной 1подъемной машиной, отличающееся
тем, что, с целью избирательного управления подъемной машиной из ка|бины, оно выполнено в виде набора индуктивных датчиков, ра1аположенных вдоль ствола шахты, и подвижного стержневого магнита, установленного
на боковой стенке кабины, который соединен с рзчкой управления, служащей Для перемещения магнита.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНОЙ | 1967 |
|
SU216201A1 |
| Устройство контроля перемещения подъемного сосуда в стволе шахты | 1988 |
|
SU1616851A1 |
| Шахтный подъемник журжи м.е. | 1976 |
|
SU856962A1 |
| ЛИФТ | 1988 |
|
RU2110467C1 |
| Устройство громкоговорящей связи для шахтного подъемника | 1986 |
|
SU1370791A1 |
| Устройство для контроля напускаКАНАТА пОд'ЕМНиКА | 1979 |
|
SU829531A2 |
| СИСТЕМА МАГНИТНЫХ ЛИФТОВ В ПОДЗЕМНЫХ ВЫРАБОТКАХ | 2023 |
|
RU2810348C1 |
| Устройство для защиты от напуска каната при застревании подъемного сосуда в стволе | 1984 |
|
SU1255540A2 |
| ПОДЪЕМНОЕ ОБОРУДОВАНИЕ | 1995 |
|
RU2139829C1 |
| Устройство контроля клети шахтной подъемной установки | 1987 |
|
SU1502452A1 |