Известны устройства для контроля изделий цилиндрической формы, в которых дифференциальные индикаторные катушки-зонды приводятся во вращение вокруг поверхности проверяемого изделия.
Предложенный дефектоскоп отличается тем, что система индикаторных катушек составлена из двух групп магнитных зондов, в каждой из которых зонды соединены между собой последовательно и согласно и расположены в шахматном порядке у поверхности изделия, а обе группы зондов включены дифференциально и установлены симметрично с противоположных сторон изделия со сдвигом по его оси.
Благодаря этому устраняются сигналы помех и повышается чувствительность дефектоскопа.
Для контроля исправности дефектоскопа в нем установлен дополнительный магнитный зонд, возбуждение которого происходит при отсутствии в дефектоскопе проверяемого изделия.
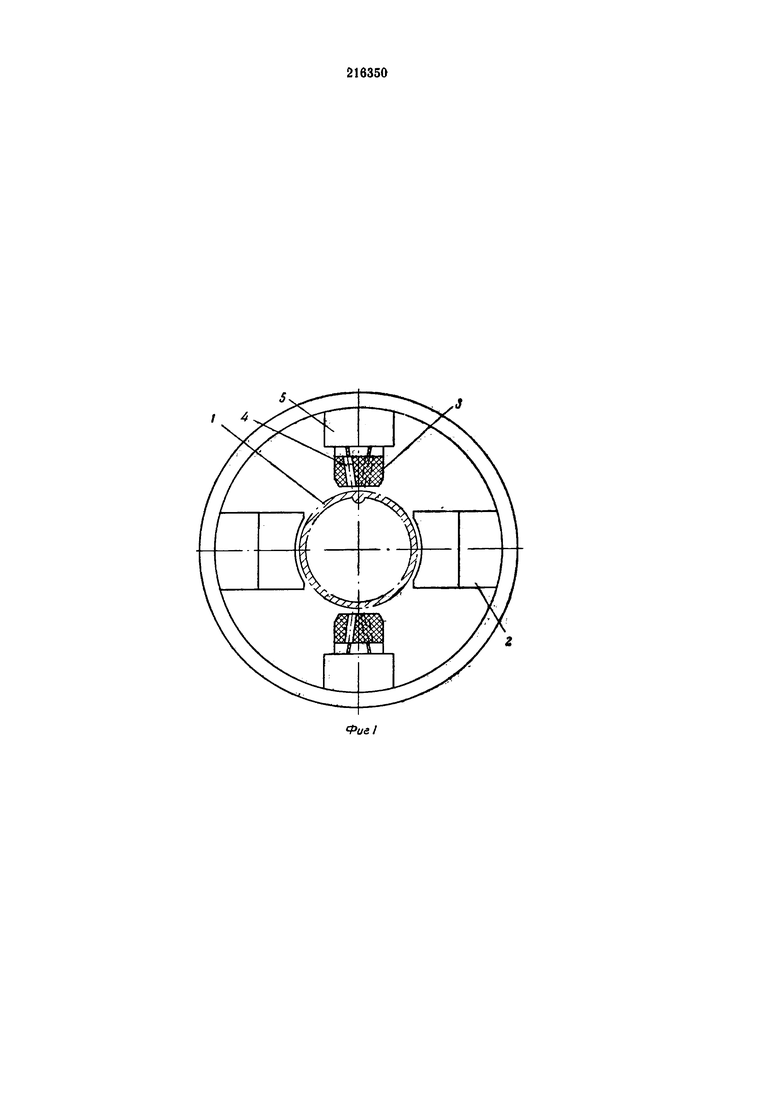
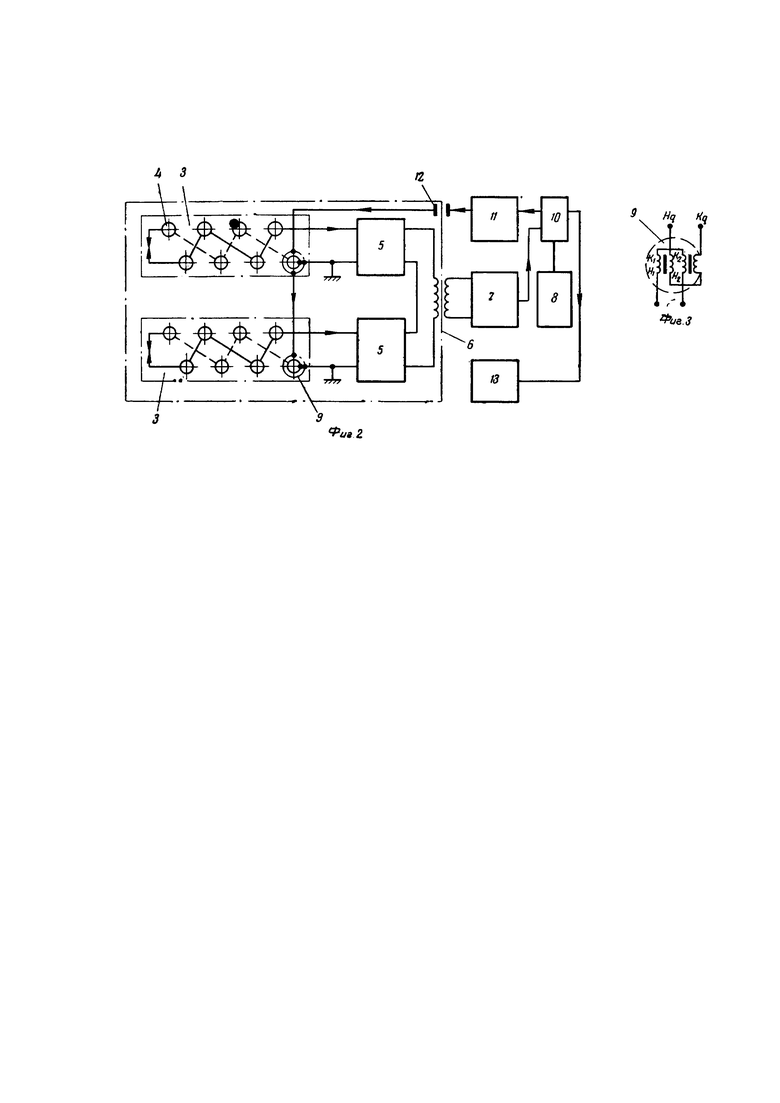
На фиг. 1 схематически изображена вращающаяся часть дефектоскопа; на фиг. 2 - блок-схема дефектоскопа; на фиг. 3 - схема соединения многоэлементной системы микроиндукционных датчиков.
Дефектоскоп для контроля ферромагнитных изделий 1 состоит из вращающегося двухполюсного электромагнита 2, датчикодержателей 3, микроиндукционных датчиков 4, амплитудно-частотного преобразователя 5, трансформаторного токосъема 6, усилителя 7, блока индикатора и отметчика 8, дополнительной обмотки 9 возбуждения сигнализатора 10 концов труб, импульсного генератора 11 и контактного токосъема 12.
Принцип работы магнитного дефектоскопа состоит в следующем. Ферромагнитное изделие цилиндрической формы поступает на вращающийся контрольный узел, состоящий из вращающегося двухполюсного электромагнита 2. Сигнал от датчика 4 подается на амплитудно-частотный преобразователь 5 и через трансформаторный токосъем 6 поступает на усилитель 7 и блок индикатора и отметчика 8.
Для самокомпенсации мешающих сигналов, например, от внутреннего грата при контроле электросварных труб, группы в каждом датчикодержателе между собой включены встречно.
В каждом датчикодержателе имеется микроферрозондовый датчик, который, кроме дифференциально включенной обмотки, содержит обмотку 9 возбуждения, подключающуюся автоматически с помощью сигнализатора 10 к импульсному генератору 11 через токосъем 12.
В случае непрохождения сигнала разбаланса, что может быть при неисправности датчиков или другого блока аппаратуры дефектоскопа, автоматически через блок 13 включается аварийная сигнализация.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный дефектоскоп | 1980 |
|
SU932380A1 |
| Электромагнитный дефектоскоп для контроля ферромагнитных объектов | 1982 |
|
SU1027593A1 |
| МНОГОКАНАЛЬНЫЙ ФЕРРОЗОНДОВЫЙ ДЕФЕКТОСКОП | 1969 |
|
SU241784A1 |
| Феррозондовый дефектоскоп | 1977 |
|
SU603891A1 |
| Дефектоотметчик | 1986 |
|
SU1430864A1 |
| Устройство для контроля твердости ферромагнитных изделий | 1991 |
|
SU1779988A1 |
| Устройство для перемещения преобразователей дефектоскопа | 1984 |
|
SU1226304A1 |
| Устройство для дефектоскопии сплошности электропроводящих материалов | 1983 |
|
SU1130791A1 |
| Феррозондовый дефектоскоп | 1977 |
|
SU682813A2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ДАТЧИК, СИСТЕМА КОНТРОЛЯ И СПОСОБ ВЫЯВЛЕНИЯ ОТКЛОНЕНИЙ ОТ НОРМЫ В ЭЛЕКТРОПРОВОДНЫХ МАТЕРИАЛАХ | 2013 |
|
RU2606695C2 |
1. Магнитный дефектоскоп для контроля изделий цилиндрической формы, содержащий намагничивающее приспособление и систему вращающихся индикаторов по типу магнитных зондов, отличающийся, тем, что, с целью устранения сигналов помех и повышения чувствительности дефектоскопа, его индикатор составлен из двух групп магнитных зондов, в каждой из которых зонды соединены между собой последовательно и согласно и расположены в шахматном порядке у поверхности изделия, а обе группы зондов включены дифференциально и установлены симметрично с противоположных сторон изделия со сдвигом по его оси.
2. Дефектоскоп по п. 1, отличающийся тем, что, с целью контроля исправности дефектоскопа, в. нем установлен дополнительный магнитный зонд, возбуждение которого происходит при отсутствии в дефектоскопе проверяемого изделия.
