Известны следящие системы, содержащие сииусно-косинусные вращающиеся трансформаторы - датчик н приемник, включенные по трансформаторной схеме, усилитель сигнала рассогласования, исполнительный двигатель и устройство контроля.
Предложенная следящая система отличается от известных тем, что ее устройство контроля состоит из двух пороговых элементов, каждый из которых подключен параллельно соответствующей роторной обмотке синуснокосинусиого вращающегося трансформатора- датчика или приемника, причем выходы пороговых элементов соединены со входами фиксирующего устройства.
Это значительно повышает надежность и точность контроля передачи команд и исправности линии связи.
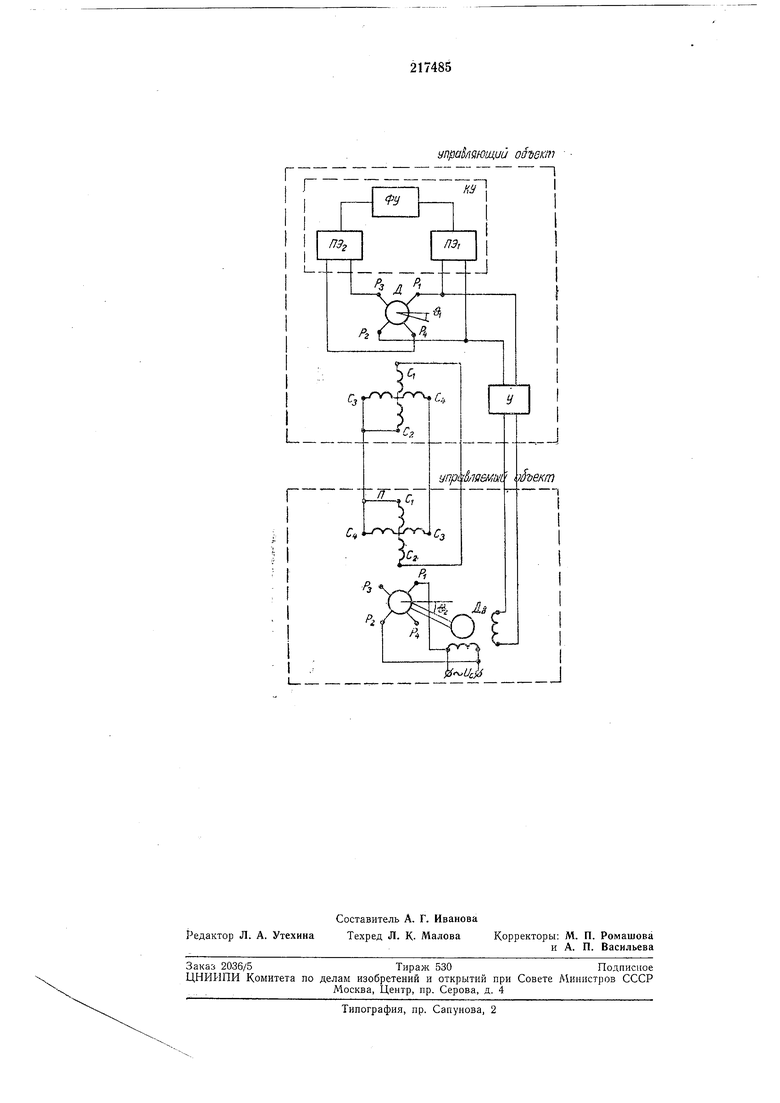
На чертелсе показана электрическая схема следящей системы.
Система состоит из синусно-косинусных вращающихся трансформаторов - датчика Д и приемника Я. Статорные обмотки Ci С. и Сз Ci соединены меладу собой, роторная обмотка PiP-2 приемиика подключена к сети переменного напряжения U,., а роторная обмотка PiP датчика - к усилителю У, питающему обмотку управления исполнительного двигателя Дв.
Обмотка возбуждения исполнительного двигателя подключена к сети переменного напрял ения.
Параллельно роторным обмоткам и датчика подключены пороговые элементы ПЭ и ПЭ-2, выходы которых электрически связаны со входами фиксирующего устройства ФУ. Пороговые элементы ЯЭ я ПЭ-2 совместно с фиксирующим устройством ФУ составляют устройство контроля КУ- СКВТ-датчик совместно с усилителем У и устройством контроля /СУ - это управляющий объект, а СКВТ-приемник совместно с исполнительным двигателем Д,в - управляемый объект.
При произвольных угловых положениях роторов 61 и во датчика и приемника соответственно и при питании роторной обмотки приемника от сети переменного напрял ения U с роторных обмоток Pi Р-2 и РЗ Pi датчика снимают соответственно напрял ения.
6Bx f c-stn©i-cose.j-|-f/c COS (01 sin Q
и, sin (e - e.,); sin01 sin 82 4- f/c cos S cos 82
/еСОЗ(в1-в2).(1)
чивых состояния: одно при LBX о, а второе при f/Bx 0.
Напряжение U U cos (61 - 62) поступает на вход порогового элемента ПЭ-2, имеющего зстойчивые состояния при С/к U и
t/K .
При исправной линии связи меледу датчиком Д и приемником /7 и правильной работе следящей системы 01 вг;
к t/c;(2)
0.
Сигнал контроля правильности передачи команд и исправности линии связи формируется пороговыми элементами, имеющими релейные характеристики. При выполнении условия (2) пороговые элементы воздействуют на фиксирующее устройство ФУ. При неправильной работе следящей системы (0х 82) или при неисправности линии связи (обрыв) одно из условий (2) или оба условия (2) не выполняются. Это фиксируется одним или одновременно двумя пороговыми элементами ПЭ и ПЭ.
В качестве пороговых элементов могут быть использованы различные типы реле: электромагнитные, поляризованные, электронные и т. п.
Напряжение питания может быть подано и на роторную обмотку датчика Д, в этом случае пороговые элементы подключаются к роторным обмоткам приемника, а сигнал исправной работы формируется непосредственно в объекте управлепия.
Предмет изобретения
Следящая система, содержащая синусно-косинусные вращающиеся трансформаторы -
датчик и приемник, включенные по трансформаторной схеме, усилитель сигнала рассогласования, исполнительный двигатель и устройство контроля, отличающаяся тем, что, с целью повыщения надежности и точности контроля передачи команд, в пей устройство контроля выполнено в виде двух пороговых элементов, каждый из которых подключен параллельно к соответствующей роторной обмотке датчика или приемника, причем выходы
пороговых элементов подключены ко входам фиксирующего устройства.
управляющий oheKm
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО Для КОНТРОЛЯ СИНХРОННО-СЛЕДЯЩИХСИСТЕМ | 1969 |
|
SU251649A1 |
| I ВСЕСОЮЗНАЯ iilAlErlTHO-IIXHlilECHAfi '•Е?^^ЕЛ!'^ОТЕКЛ | 1973 |
|
SU382066A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ BtTPA С БОРТА ДВИЖУЩЕГОСЯ КОРАБЛЯ | 1971 |
|
SU296036A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| СПОСОБ НАСТРОЙКИ ФАЗОВРАЩАТЕЛЯ | 1970 |
|
SU273267A1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| Преобразователь кода в угол поворота вала | 1985 |
|
SU1312741A1 |
| Следящая система | 1982 |
|
SU1118961A1 |
| Фазовая следящая система | 1975 |
|
SU543973A1 |