1 Предложенное устройство относится к об ласти автоматики и предназначено для контроля правильности дистанционной передачи команд и сигналов.
Известные устройства для контроля дистанционных передач, содержащие два пороговых блока, подключенных к роторным обмоткам приемника и измерительному блоку, не обеспечивают достаточную точность контроля при всех неисправностях.
Предложенное устройство отличается от известных тем, что в пем установлен синусно-косинуспый вращаюпдийся трансформатор (СКВТ), ротор которого механически связан с ротором датчика синхронно-следящей сиетемы и развернут относительно него на 45°, статорные обмотки подключены параллельно статорным обмоткам датчика и роторные обмотки, соединенные последовательно и встречно, связаны с измерительным элементом, в цепи питания которого включен нормально разомкнутый контакт реле.
Это позволяет повысить точность и надежность контроля положения следящей системы.
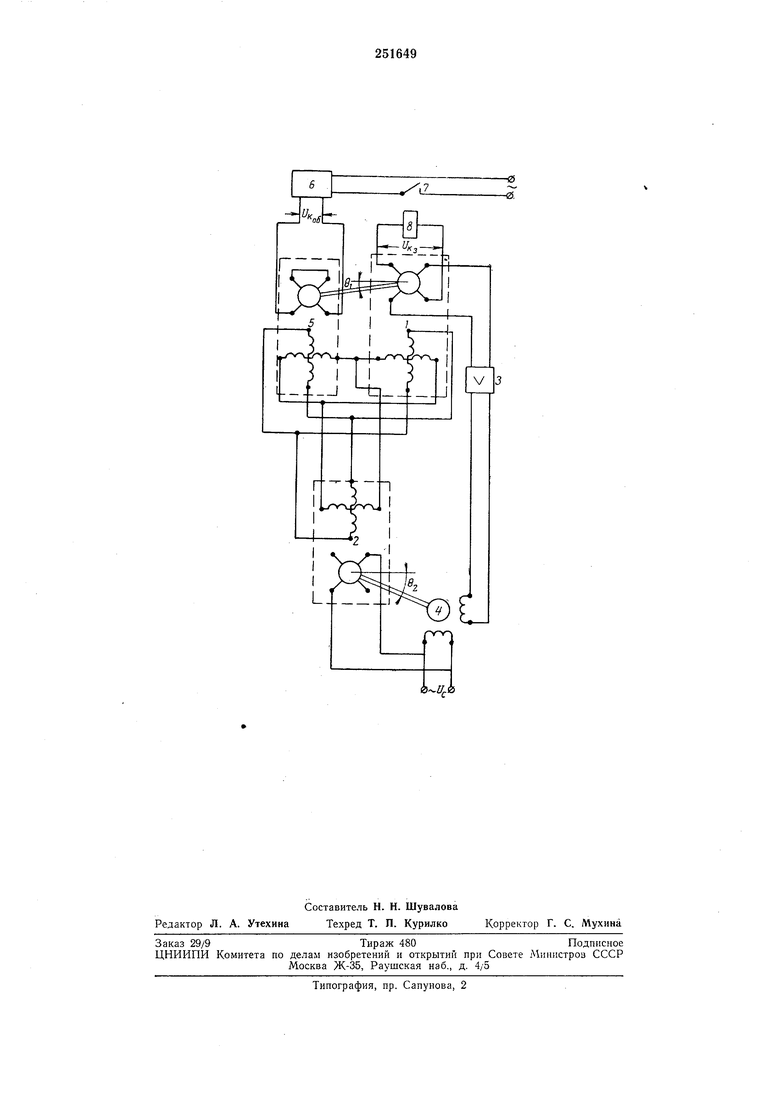
На чертеже показана электрическая схема устройства для контроля синхронно-следящих систем.
тор (СКВТ) - датчик / и приемник 2, соединенные по трансформаторной схеме. Напряжение питания 6с поступает на статорную обмотку СКВТ-приемника 2, сигнал рассогласования Снимается с роторной обмотки датчика 1 и поступает на вход усилителя 3, питающего обмотку управления исполнительного двигателя . На одном валу с датчиком У установлен контрольный СКВТ 5, статорные обмотки которого питаются параллельно статорным обмоткам датчика /. Ротор контрольного СКВТ 5 развернут па угол 45° по отнощению к ротору датчика /.
При произвольном положении роторов датчика и приемника с роторных обмоток контрольного СКВТ 5 снимаются сигиалы
гУк, (7с А sin (62 - 01 -f 45);
f/K, f/c cos (в., - BjL 4- 45),
где вь во - углы поворота СКВТ 1 и 2;
k - коэффициент пропорциональности.
При исправности линий связи и при условии правильного ввода (61 62):
f/K, и,,
и.,, 0.
виде схемы сравнения или нулевого индикатора, который формирует сигнал правильности ввода при наличии питания и при входном сигнале, равном нулю.
Однако возможны такие случаи неисправности, когда /к, 0 и UK 0 (при обрыве двух линий связи датчика 1 с приемником 2 или при обрыве одной линии и при съеме с исправной напряжения возбуждения, равного нулю, и пр.).
Такая неисправность в системе устраняется путем подачи питания на измерительный элемент через контакты 7 реле 8, включенного в квадратурную обмотку датчика 1, на которой при исправности линий связи и при правильном вводе индуктируется напряжение, равное
УК, l/cfecos (62-61).
Напрянсение возбуждения подается на СКВТ-приемник (см. чертеж) и сигнал рассогласования снимается с роторной обмотки датчика. Это позволяет сократить число дистанционных линий связи, однако в случае необходимости напряжение возбуледения может поступать на обмотку датчика, и сигнал рассогласования снимается с роторных обмоток приемника. Тогда контрольный датчик устанавливается на одном валу с приемником, а
реле, через контакты которого поступает питание на измерительный элемент, подключается к квадратурной обмотке СКВТ-приемника. В этом случае измерительный элемент может быть расположен как в объекте, так и на командном пункте, откуда производится дистанционный ввод команд и сигналов.
Предмет изобретения
Устройство для контроля синхронно-следящих систем, содержащее измерительный элемент и пороговый блок на реле, обмотка которого подсоединена к квадратурной роторной обмотке синусно-косинусного вращающегося трансформатора - датчика синхронноследящей системы, отличающееся тем, что, с целью повышения точности и надежности контроля положения следящей системы, в нем дополнительно установлен синусно-косинусный вращающийся трансформатор, ротор которого механически связан с ротором датчика синхронно-следящей системы и развернут относительно него на 45°, статорные обмотки подключены параллельно статорным обмоткам датчика и роторные обмотки, соединенные последовательно и встречно, связаны с измерительным элементом, в цепи питания которого включен нормально разомкнутый контакт реле.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА | 1968 |
|
SU217485A1 |
| СЛЕДЯЩАЯ СИСТЕМА С КОНТРОЛЕМ ИСПРАВНОСТИ | 1973 |
|
SU383008A1 |
| I ВСЕСОЮЗНАЯ iilAlErlTHO-IIXHlilECHAfi '•Е?^^ЕЛ!'^ОТЕКЛ | 1973 |
|
SU382066A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ BtTPA С БОРТА ДВИЖУЩЕГОСЯ КОРАБЛЯ | 1971 |
|
SU296036A1 |
| Устройство для контроля систем автоматического регулирования | 1978 |
|
SU1841197A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| СПОСОБ НАСТРОЙКИ ФАЗОВРАЩАТЕЛЯ | 1970 |
|
SU273267A1 |
| СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОТРАБОТКИ ВЕКТОРНОЙФУНКЦИИ | 1970 |
|
SU277905A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 1979 |
|
SU826287A1 |