(54) ФАЗСВАЯ СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для контроля многополюсных вращающихся трансформаторов | 1979 |
|
SU868815A1 |
| Следящая система переменного тока | 1973 |
|
SU478283A1 |
| Устройство для измерения малых угловых скоростей | 1976 |
|
SU591767A1 |
| Фазовая следящая система | 1975 |
|
SU543973A1 |
| Фазовая следящая система | 1974 |
|
SU552587A1 |
| Устройство контроля следящей системы передачи угла | 1976 |
|
SU651398A1 |
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
| Преобразователь угла поворота вала в фазовый сдвиг двух напряжений | 1975 |
|
SU632895A1 |
| Преобразователь кода в угол поворота вала | 1985 |
|
SU1312741A1 |
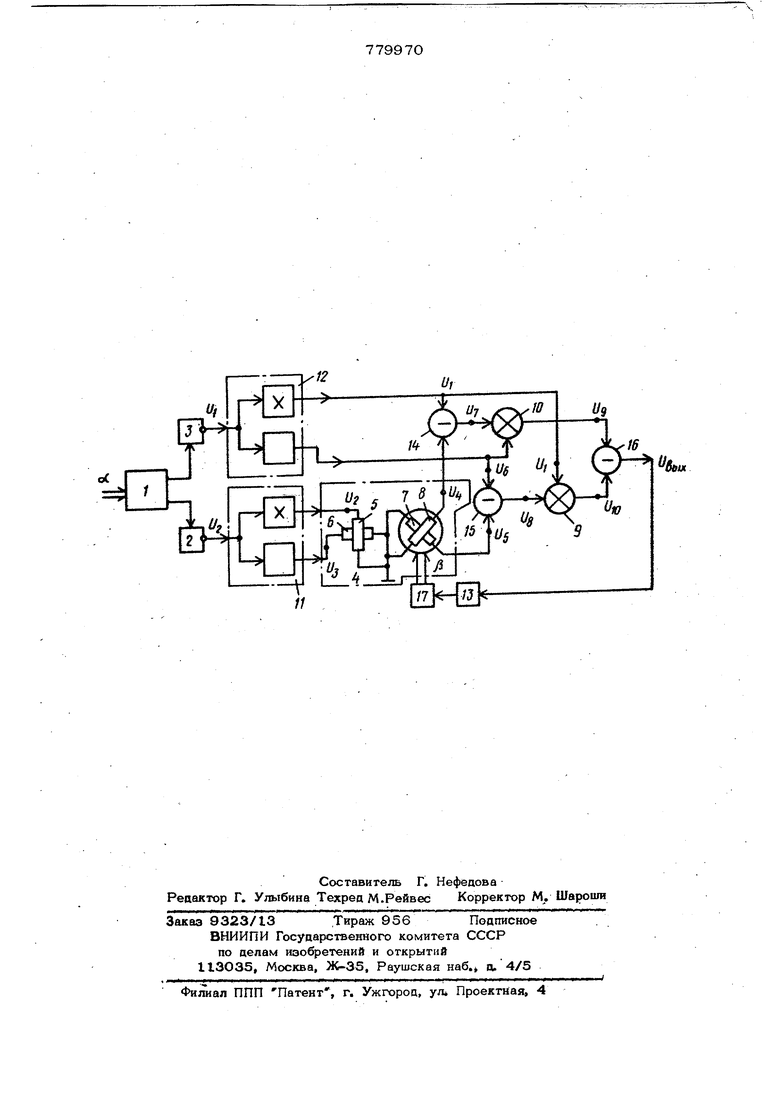
Изобретение относится к области ав.тематики и телемеханики и может найти широкое применение при построении прецизионных слецящих систем измерен1йя уг лов поворота, В настоящее время в системах такого роаа широкое применение получили цатчики угла с электрической редукцией, в частности, параметрические датчики, содержащие механический модулятор, ус.тановленный на валу электродвигателя, Такие датчики при сравнительно умеренных требованиях к точности изготовления сборки позволяют получить точность порядка 1-2 угл, с. Однако информация об угле поворота в этих датчиках представлена фазовым сдвигом между сигналь ным и опорным напряжениями, что вызывает необходимость применения следящих систем с фазовым управлением, включающих в себя фазовращатель-приемник на СКВТ с Я С-цепью l , Применяемые следящие системы вносят дополнительные погрешности, основными из которых явл5потся погрешньсть,обусловленная нелинейностью характеристики угол-фаза фазовршцателя прйёмнйка и пог|)ешности, вызьюаемые нестабильностью характеристики угол-фаза фазовращателя-приемника и характеристики фаза-напряжение рассогласования демодулятора (фазового дискриминатора), В известных фазовых следящих сиртемах коррекция погреигностей, возникающих от нестабильности электроэлементов системы, осуществляется с помощью фазе- расщепителя, используемого для питания фазовращателя-приемника, выявление возникающих погрешностей осуществляется с помощью ряда коммутаторов, а смещение нулевого положения исполнительного вала устраняется оператором с помощью корректирутощего фазовращателя 2, 3j . Использование в известных системах коммутаторов даже электронного типа приводит к уменьшению быстродействия системы; и, следовательно, к дополнительным динамическим погрешностям. 377 Из известньос фазовых следящих систем наиболее близкой гго технической сущности является система, содержащая параметрический датчик, первый выход которого череэ последовательно соединенные первый детектор и первый фазорасщепитель подключен к статорным обмоткам СКВТ-прие ника, роторные обмотки которого подключены к первым входам соответственно пер вого и второго вычитателей, второй выход параметрического датчика через второй детектор соединен со входом второго фазорасщепителя, первый выход которого соединен с первым входом первого демоду лятора и вторым входом первого вычитателей, а второй выход - с первым вхопом второго вычитателя, выход которого соединен со вторым входом первого демодулятора, выход которого через последовательно соединенные третий вычитатель усилитель и исполнительный двигатель соединен с валом СКВТ-приемника f4} . Целью изобретения является повышение точности фазовой следящей системы с параметрическим датчиком угла за сче уменьшения нестабильности фазовращателя и демодулятора и улучшения линейности характеристики угол-фаз -фазовращателя путем повышения инструментальной точности СКВТ Н( например, благодаря исключению погрешности из-за неравенства коэффициентов трансформадии и неортогональности статорных и роторных обмоток .{СКВТ). Цель достигается за счет того, что в системе установлен второй демодулятор, первого вход которого соединен съ вторым выходом второго фазорасщепителя, второй вХод - с выходом второго вычитателя, а выход - со вторым входом третьего, вычитателя. Блок-схема представлена на чертеже, где параметрический датчик (угла) 1, первый и второй детекторы 2,3, синуснокосинусный вращающийся трансформатор (СКВТ)-приемник 4, статорные обмотки СКВТ-приемнйка 5,6 роторные обмотки СКВТ-приемника 7,8, первый и второй демодуляторы 9,10, первый и второй фазорасщепители 11, 12, усилитель 13, первый, второй и третий вычитатели 14, 15, 16, исполнительный двигатель 17, cL -угол поворота входного вала, (Ьугол поворота ротора СКВТ 4, И, ,И напряжение на выходе соответственно первого и второго детекторов 2,3, напряжение на втором выходе первого фазорасщепителя 11, И , Hj -напряжение на выходе роторных обмоток 7 8 СКВТ, И - напряжение на втором ыходе второго фазорасщепителя 12, И Hg - напряжение на выходах соответсвенно первого и второго вычигателей 4, 15, и И - напряжение на. выодах соответственно первого и второго емодуляторов, И,- напряжение на выоде третьего вычитателя 16. Система работает следующим образом. араметрический датчик угла 1 генеирует два высокочастотных сигнала, одулированных по амплитуде частотой: ,И) де; 5i -угловая скорость вращения модулятора датчика угла I; р - коэффициент электрической ;редукции .датчика угла I. Детекторы 2 и 3 выделяют огибаюие модулированных сигналов, относительое изменение фазы которых равтю; 4--oLp,(2.) де: oL - угол поворота ротора датчиугла 1. . . Огибающие (переменные напряжения с частотой Р ) поступают на фазорасщепители 11 и 12, каждый из которых преобразует входное напряжение в два выходных, сдвинутых по фазе на . При подаче этих напряжений на обмотки 5 и 6 СКВТ 4 в воздушном .зазоре между ротором и статором образуется вращающееся магнитное поле, в результате чего на роторных обмотках 7 и. 8 возникают напряжения, фаза которых изменяется пропорционально углу поворота ротора, Между собой напряжения обмоток 7 и 8 сдвинуты по фазе на . Напряжения по фазе на обмоток 7 и 8 вычитаются с помощью вычитателей 14 и 15 из выходных напряжений фазорасщепители 12. В результате на выходах .вычитателей 14 и 15 при равенстве амплитуд поступающих на них напряжений получаются напряжения, пропорцион альные углу рассогласования между роторами датчика угла 1 и СКВТприемника 4. Эти напряжения рассогласования являются квадратурными (т.е. сдвинутыми по фазе на S ) по отношению к вычитаемым напряжениям. При неточном выполнении равенства вычитаемых нагфяжений, напряжение на выходе, например вычитателя 14, имеет синфазную составлякицую, искажающую информацию об угле рассогласования. Поэтому для фильтрации этой синфазной составляющей выходные напря- жения вычитателей 14 и 15 подаются на демодуляторы 9 и 10, выделякдцие только 5 квадратурные составл$пощие. Выходные напряжения аемоцуляторов 9 и 1C поступают на вычитатель 16, благодаря которому составляющие выходных напряж ний цемоауляторов, обуславливающие не.линейность характеристики угол-фаза СКВТ-приемника, вычитаются (компенсируются), а полезный об угле рассогласования уоваивается, усиливается усилителем 13 и воздействует на обмотку управления исполнительного двигателя 17 до сргласования им задающего и исполнительного вала, т.е. происходит выполнение условия: .dLp-t -0,СЬ) из которого следует, что; . .(-Р, (4) т.е. ротор СКВТ-приемника 4 отрабатывает угол поворота параметрического датчика I с коэффициентом передачи (ре дукции) р . При использовании параметрического датчика угла I IB качестве приемника,, а СКВТ-приемника 4 в качестве датчика в системе выполняется условие: oLJlb--1|p,(5) т.е. коэффициент передачи равен -1 В первом случае (4) система используется для измерения угла поворота вала во втором (5) - для установки угла поворота вала. Приведем доказательство эффективност предложенной следящей системы с помощью препставленн-ой функциональной схе мы, для чего введем следующие обозначения:(амплитуда напряжейия Uj-W -cos -jsin и на входе фазорасщ пи теля 12 принята равной 1); -напряжение, .на входе U. + U4 фазорасщепителя llj -относительная разница ... . амплитуд напряжений U, и из Г сЛ j(t+u.j.) -коэффициент передачи второго канала фазорасщепителя 12 (коэффициент передачи первого канала равен ) -амплитудная относитель ная расстройка фазорасщепителя 12; -фазовая расстройка фазорасщепителя 12; di3(.(A.-tJA) -коэффициент передачи второго .канала фазо0росшепителя 11 {коэффициент передачи первого канала равен ); д -амплитудная расстройка фазовая расстройка фазорасщепителя 11 ,. -напряжение на обмотке 6 СКВТ-приемника4, Напряжение Уд. и Jg на выходных обмотках 7 и 8 СКВТ-приемника 4 равU4-U2COSp - -U,Coe(p-vJ i-1tj2), (6) Ug- U2Sin((ivy-2)4U,j5in(|,+y,- -y2 t:/2) ( + л), (7 . где. j - неортогональность обмоток 5 и 6; -j -неортогональность обмоток 7 и 8; й-- относительная разница коэ4 фициентов трансформации обмоток 7 и 8, Выражения (6) и (7) преобразуем к виду; U4.-U2« osp-ij,(ein(b+u.co9ib), (8) Ug- U Csiii jb 1-л gcosp) «-и,,со5р. - (д ,. le-irifbll М-ел ) где при, малых; «j- и -y -л., ТГ , , Подставив ь формулы (8) и (9) значения U-, и 1, « получим без учета величин второго порядка малости , (.-,)СОБр. + J -(. ч-л.,.gl51«P i(+Л 4- 1д-«- 4, При идеально точном слежении ротора СКВТ-приемника 4 за изменением фазы выполняется условие SPaft ; Тогда jianp жение на выходе вычитателя 14 6yaeTt .)cosp.p (, .j glsinp., (12) -„ ение на вьосоде вычитателя 15 будет при: .., , (хг) равно; Ug--U5-U(u..,,t,-j.,,-J6.-ju )sinp.-)(Ai-u.. jfc 5-jfiigKosfb(14) Напряжение на выходе цемодулятора определим, как: Re(UJ)(Uь)3(.,C03 fb-A sinlbCOSp, I (15) 57Т 7 rnet ft|,(.U) - действительная часть {)„ - коэффициент гфи мнимой части . Напряженке на выхоае аемоцулятора 9 равно , ) V etJ- е С -5 - 4 sinjbcosfv. Погрешность воспроизведения фазы по воротом ротора СКВТ-приемника 4 определим в виде; БЫк. передачи угла а погрешность системы в видеГ Формула (18) показывает, что погреш ность предложенной системы не зависит (с точностью до величин второго порядка малости) от угла поворота , а являе ся постоянной величиной, учитываемой при начальной выставке ротора СКВТприемника 4, т.е. достигается линеаризация характеристики угол-фаза СКВТприемника 4. Поскольку в системе используются идентичные фазорасщепители II, 12, мож но считать, что , и, следовательно, происходит компенсация измене-, ния погрешности смещения нуля системы при изменении частоты сигналов датчика угла I из-за нестабильности вращения двигателя модулятора. Демодуляторы 9,1О в системе работают при малом (вычтенном) коммутируемом (входаом) сигнале, что позволяет уменьшить .уровень коммутирую щего (опорного) сигнала, обусл ливаю щего остаточное напряжение на выходе демодуляторов 9,10, дрейф которого определяет погрешность нестабильности указанных демодуляторов. Экспериментальная проверка показала, что нестабильность демодуляторов 9, 10 в системе вызьтает погрешность в десятки раз меньше по сравнению с известными сис темами. 0 8 Формула и 3 о б р е, т е н и я Фазовая следящая система, соаержаая параметрический датчик, первый выход которого через последовательно соединенные первый детектор и первый фазорасздепитель подключен к статорным обмотками ciraycHo-косинусного вращающегося трансформатора (СКВТ)-прием обмотки которого подклю Р ° соответственно первого и второго вычитателей, второй выход параметрического датчика через второй детектор соединен со входом второго фазорасщепителя, первый выход которого соединен с первйм входом первого демодулятора и вторым входом первого вычит ателя, а второй выход - с первым входом второго вычитателя, выход которого соединен со вторым входом первого демодулятора, выход которого через последовательно соединенные третий вычитатель, усилитель и исполнительный двигатель срединен с валом синусно-косинусно вращающегося трансформатора СКВТ-приемника, отличают а яс я тем, что, с целью .повышения точности системы, в ней установлен второй демодулятор, первый вход которого соединен со вторым выходом второго фазорасщепителя, второй вход - с выходом второго вычитателя, а в выход - со вторым входом третьего вычитателя. Источники информации, принятые во. внимание при экспертизе 1.Элементы цифровых систем управления. Под. ред. В. А. Мясникова, Л., Наука, 1971, с. 234. 2.Авторское свидетельство СССР N9 317041, кл. (5 05 В .11.69. 3.Авторское свидетельство СССР Nr 552587, кл. Q 05 В 11/01, 17.6,74. 4.Авторское свидетельство СССР М ЗЗО424, кл. G; О5 В 5/01, 1969 (прототип).
