Известные устройства для регулирования скорости асинхронного электроиривода нодъемно-транспортных установок, например, малых шахтных подъемных машии, подвесных канатных дорог и т. п., содержащие датчик нагрузки, усилитель, управляющий элемент и исполнительный орган в виде регулируемого тормоза, сложны и недостаточно надежны.
Предлагаел ое устройство лишена указанных недостатков благодаря тому, что к выходу датчика на;|), выполненного в виде фазочувствительного выпрямителя, подсоединена одна из обмоток управления двухкаскадного магнитного усилителя, вторая обмотка управления и обмотка смещения которого чорез контакты реле времени и регулируемые сопротивления подключены к источнику выпрямленного напряжения, а на выход второго каскада усилителя через выпрямитель включена обмотка возбуждения регулируемого тормоза. Обмотка управления и обмотка cv&щения магнитного усилителя подключены к источнику выпрямленного напряжения через контакты реле времени и регулируемые сопротивления.
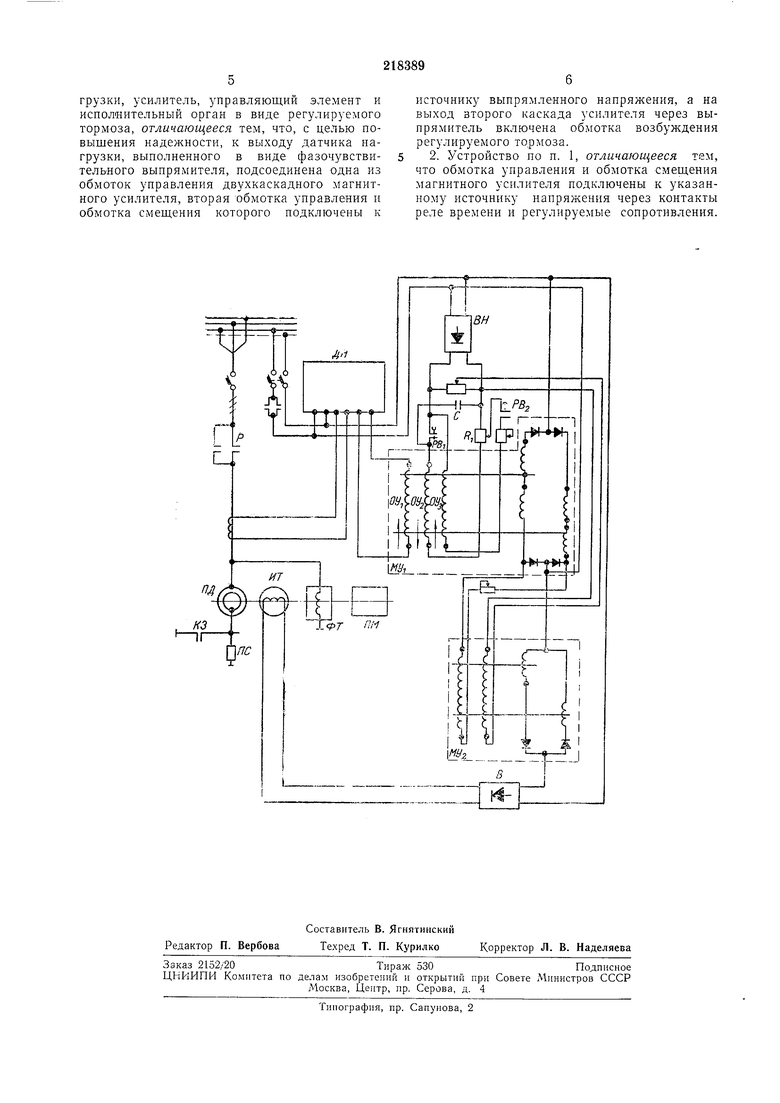
Па чертеже представлена принципиальная схема предлагаемого устройства.
В момент включения реверсора Р и одновременно приводного двигателя ПД с введенным в цепь ротора пусковым сопротивлением ПС получает питание датчик нагрузки ДН, выполненный в виде фазочувствительного выпрямителя.
Выходной ток датчика ДН, протекающий через обмотку управления ОУ1 магнитного усилителя МУ первого каскада, определяется его настройкой и потребляемой активной мощностью датчика ДН. Усиленный в магнитном усилителе МУ сигнал поступает на вход силового магнитного усилителя МУ2 второго каскада, а выпрямленное полупроводниковым мостом (выпрямителем) В выходное напряжение усилиголя МУ-2 подается на обмотку возбуждения индукционного тормоза ИТ.
Направление токов смещения и управления магнитных усилителей выбрано таким образом, ч го повышению нагрузки приводного двигателя соответствует уменьшение тока возбуждения тормоза НТ, а следовательно, и его тормозного момента.
В обмотке ОУо усилителя МУ от независимого источника выпрямленного напряжения ВН посредством регулируемого сопротивления KI устанавливается ток, обеспечивающий полное открытие магнитного усилителя ,. Протекающий в обмотке управления ОУ ток управления от датчика ДН направлен встречно току в обмотке ОУо, вследствие чего степень открытия усилителя МУ уменьшается, и его рабочий ток соответственно снижается. Чем больше то-к, протекающий в обмотке ОУь тем меньше результирующие амиервитки управления, а, следовательно, и выходной ток усилителя МУ. Рабочий ток силового усилителя изменяется в полном соответствии с рабочим (выходным) током усилителя МУ и поэточму уменьшению нагрузки будет соответствовать увеличение тормозиого момента тормоза ИТ.
При увеличении статической нагрузки на валу двигателя выходной ток датчика ДН возрастает, и соответственно снижается ток возбуждения тормоза ИТ и его тормозной момент.
В .результате действия регулятора привод подъемно-трансиортного механизма разгоняется до заданной ноиижеиной скорости и дальше продолжает работать с этой скоростью.
Ускорение привода до максимальной скорости, соответствующей работе приводного асинхронного двигателя на его естественной характеристике, осуществляется с иомощью реле времени или путевого выключателя посредством снятия положительного смещения (размыкания цепи обмотки управления ОУ) с усилителя первого каскада МУ и подачи дополнительных пебольших отрицательных ампервитков на одну из его обмоток управления ОУз, что вызывает полное закрытие силового магнитного усилителя МУ, и, следовательно, растормаживание привода. Второй контакт реле (путевого выключателя) включает короткозамыкатель /(3 сопротивления в цепи ротора. Двигатель ускоряется до номикальнОЙ скорости и ггродолжает работать на естественной характеристике.
Значения ускорений, определяемых величиной динамического момента и маховыми массами привода в большинстве случаев «е превышают допустимой величины 0,7 л/сек.
При значительном динамическом моменте и небольшом моменте инерции движущихся масс могут иметь место ускорения, превышающие допустимые правилами безопасности значения. Для умепьщения ускорения при разгоне привода необходимо обеспечить постепениое, медленное, растормаживание регулируемого тормоза.
По истечении периода движеиия с заданной пониженной скоростью реле времени размыкает контакт PBi в цепи обмотки смещения ОУа усилителя МУ и замыкает контакт РВ2 в цепи его обмотки управления ОУд. Другим замыкающим контактом реле времени включается короткозамыкатель соиротивления в цепи ротора.
постепенного ослабления тормозного момента, создаваемого индукционным тормозом.
По мере затухания тока в обмотке смещения ОУа магнитный усилитель А1У закроется, по не полностью, так как нулевому смещению соответствует примерно 70-ЗОУо, выходного тока.
Необходимые для Обеспечения полного снижения тормозиого усилия дополнительные
ампервитки создаются обмоткой ОУз, ток в которой постепенно нарастает и достигает своего максимального значения после затухапия тока в обмотке ОУ-2- Медленное повышепие тока в обмотке ОУз происходит по мере
плавного снижения падения напряжения в сопротивлении Ri, обусловленного затуханием тока в обмотке ОУ.
Замедление привода подъемно-транспортной установки производится путевым выключателем, отключающим короткозамыкатель (в цепь ротора вводится сопротивление ПС), и одновременно подающим нормальное смещение на усилитель МУ (включается размыкающий контакт PBi реле времени в цепи обмотки смещения ОУз). Скоросгь движения привода подъемно-транспортной установки уменьшается и через некоторое время достигает заданной пониженной скорости, с которой подъемный сосуд подходит к конечному выключателю у места его окончательной остановки.
Конечным выключателем отключается реверсор Р, и электрический фрикционный тормоз vT производит стопорение установки -
производственный механизм ЯМ останавливается.
Увеличить величину замедления можно путем усиления возбуждения индукционного тормоза повышением тока в обмотке ОУг усилителя МУ. Для уменьшения «естественного замедления используется некоторый промежуток времени между моментами включения сопротивления в цепь ротора и вводом в действие регулируемого тормоза.
Таким образом, регулятор обеспечивает выполнение следующей семипериодной диаграммы скорости: разгон до заданной попиженной (ползучей) скорости; равномер-ное движение с пониженной скоростью; разгон до полной
(максимальной) скорости; равномерное движение с максимальной скоростью; замедление до ползучей скорости; равномерное движение с ползучей скоростью; стопорение. Возможность построения устройства с минимумом контактов (вариант с применением тиристоров) является преимуществом, позволяющим легко осуществить его во взрывобезопасном исполнении, что значительно расширяет возможную область его применения.
грузки, усилитель, управляющий элемент и исполнительный орган в виде регулируемого тормоза, отличающееся тем, что, с целью повышения надел ности, к выходу датчика нагрузки, выполненного в виде фазочувствительного выпрямителя, подсоединена одна из обмоток управления двухкаскадного магнитного усилителя, вторая обмотка управления и обмотка смещения которого подключены к
источнику выпрямленного напряжения, а на выход второго каскада усилителя через выпрямитель включена обмотка возбуждения регулируемого тормоза.
2. Устройство по п. 1, отличающееся тем, что обмотка управления и обмотка смещения магнитного усилителя подключены к указанному источнику напряжения через контакты реле времени и регулируемые сопротивления.