Известны устройства для регулирования взаимосвязанных систем, в которых осуществляется взаимосвязь между управляющими сигналами ошибок отдельных систем регулирования.
В предложенном устройстве вход аналогового регулятора тока возбуждения связан с измерительными обмотками на главных полюсах двигателей, а выход дискретного регулятора соотношения скоростей через множительные элементы подключен ко входу аналогового регулятора электродвижущей силы.
В результате значительно повысилась точность и надежность устройства.
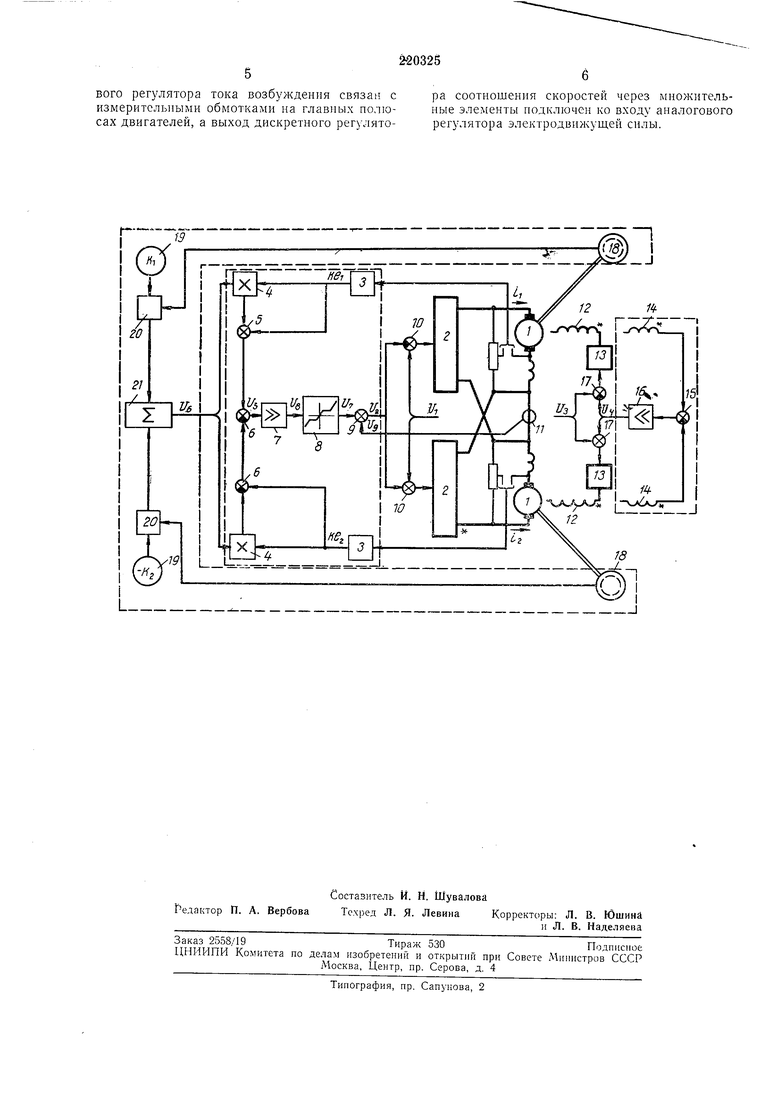
На чертеже приведена функциональная схема устройства регулирования.
На схеме приняты следующие обозначения:
/ - якори прокатных двигателей верхнего и нижнего валков; 2 - преобразователи, питающие якори прокатных двигателей; 3 - датчики э.д. с.; 4 - множительные элементы; 5 и 6 - суммирующие элементы; 7 - усилитель; 8 - функциональный преобразователь; 9 и 10 - суммирующие элементы; 11 - датчик разности токов; 12 - обмотки возбуждения прокатных двигателей; 13 - преобразователи, питающие обмотки возбуждения; 14 - измерительные обмотки на главных полюсах прокатных двигателей; 15 - суммирующий элемент; 16 - усилитель; 17 - суммирующие
элементы; 18 - импульсные датчики скорости на валах прокатных двигателей; 19 - задатчик соотношения скоростей; 20 - схемы совпадения; 21 - цифровой накапливающий сумматор и преобразователь код - аналог.
Можно сгруппировать рассматриваемые устройства в три группы:
1)аналоговый регулятор э.д.с., воздействующий на входы преобразователей 2. В него входят изолирующие элементы - датчики 3, мнол ительные элементы 4, суммирующие элементы 5,6 и Я усилитель 7, функциональный преобразователь 8, изолирующий элемент - датчик разности токов 11;
2)аналоговый регулятор потоков (тока), воздействующий на входы преобразователей 13. Он содержит измерительные обмотки 14, суммирующий элемент 15 и усилитель 16;
3)дискретный регулятор соотношения скоростей, воздействующий на аналоговый регулятор соотношения э. д. с. через множительные элементы 4. Он включает импульсные датчики 18, задатчики 19, схемы 20, сумматор 2L
Якори одинаковых двигателей постоянного тока верхнего и нижнего валков питаются от одинаковых . реверсивных преобразователей (полупроводниковых, ионных или электромагнитных) .
, a на вход другого преобразователя () сигнал t/i+La, где Ui сигнал от устройства совместного регулирования напряжения двигателей; LJ-2 - сигнал от регулятора э. д. с.
Обмотки независимого возбуждения 12 прокатных двигателей питаются от нереверсивных преобразователей 13. На вход верхнего на схеме преобразователя действует сигнал , на вход преобразователя сигнал где Us - сигнал от устройства совместного регулирования возбуждения двигателей, (/4- сигнал от регулятора потоков.
В регуляторе э. д. с. используется обратная связь но э. д. с. двигателей. Сигнал, пропорциональный э. д. с. каждого двигателя, выделяется посредством обычной мостовой схемы и вводится в регулятор через изолирующий элемент - датчик э. д. с.
Сигнал рассогласования регулятора соотношения э. д. с. имеет вид
и, М+.1,-(., (I)
L -м/ J
где t/5 - сигнал рассогласования;
L/s - выходной сигнал регулятора соотношення скоростей; /1, /2 - э. д. с. двигателей верхнего и нилшего валков соответственно; k - коэффициент нропорциональности; (/м- масштабный коэффициент множительного элемента.
Сигнал f/c задает требуемое соотношение э. д. с. Регулятор на холостом ходу двига телей поддерл :ивает соотношение
Izi
t/r
1+
f/M
как следует из формулы (1).
Сигнал рассогласования проходит на выход регулятора через усилитель и функциональный преобразователь.
Сигнал t/7 на выходе функционального преобразователя связан с сигналом Ug на его входе определенной зависимостью. Помимо сигнала U, на выход регулятора подается сигнал Ug, пропорциональный разности токов двигателей: t/g C(ii-/2), где ii,h - ток якоря двигателей соответственно верхнего и нижнего валков, С - коэффициент пропорциональности.
При таком построении регулятора поддерживается заданное соотношение э.д. с. на холостом ходу двигателей, а также отмечается малая разность токов при прокатке и ограничение разности скоростей в случае, если один ИЗ валков потеряет сцепление с прокатываемым металлом.
быть включен резистор, через который будет протекать ток Il-4 (силовое выравнивание нагрузки; в этом варианте отпадает необходимость в сигнале Ug.
На вход регулятора потоков воздействует разность сигналов от измерительных обмоток, пропорциональная производной разности магнитных потоков.
Благодаря сильной отрицательной обратной связи по производной разности потоков изменение разности потоков под действием какихлибо факторов будет происходить очень медленно с очень большой постоянной времени.
Каждый из импульсных датчиков дает определенное (одно и то ) число импульсов на оборот прокатного двигателя.
При поступлении импульса от верхнего датчика 18 в накапливаюший сумматор добавляется число KI, при поступлении импульса от нилшего датчика 18 - добавляется число KzСодержимое сумматора, преобразованное в аналоговую форму, представляет сигнал U, воздействующий на регулятор соотношения э.д. с.
Если не выполняется условие /Ci«i-Kz s - Q или - - (2) где «ь п - скорости враще«2AI
ния двигателей, то содержимое сумматора и вместе с ним сигнал будут изменяться до тех пор, пока не установится режим, при котором выполняется условие (2).
Соотношение - представляет собой задан 1ное соотношение скоростей.
Чтобы система регулирования не обладала астатизмом, сумматор должен быть охвачен отрицательной обратной связью: с определенной периодичностью из содержимого сумматора Л должно вычитаться число аЛ, где (а- 0 постоянный коэффициент).
Ввиду того, что разность магнитных потоков двигателей изменяется очень медленно, регулятор соотношения э.д.с. может обеспечить необходимое соотношение скоростей даже при резкой корректировке его входного сигнала Ue, т. е. не требуется высокого быстродействия дискретного регулятора соотношения скоростей, следовательно, можно обойтись сравнительно небольшим числом импульсов на 0 один оборот датчика.
Кроме того, ввиду воздействия через множительные элементы импульсные датчики не индицировать направление вращения двигателей.
„
Предмет изобретения
Устройство для автоматического регулирования соотношения скоростей электродвигателей индивидуального привода валков прокатного стана, содержащее дискретный регулятор соотношения скорости валков, аналоговые ре гуляторы электродвижущей силы и тока воэ буждения и мнол ительные элементы, отличаю щееся тем, что, с целью повышения точности и надежности устройства, в нем вход аналогоБого регулятора тока возбуждения связан с измерительными обмотками на главных нолюсах двигателей, а выход дискретного регулятора соотношения скоростей через множительные элементы нодключен ко входу аналогового регулятора электродвнжущей силы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Система автоматического управления | 1985 |
|
SU1409964A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СООТНОШЕНИЯ СКОРОСТЕЙ ДЛЯ ИНДИВИДУАЛЬНОГО ПРИВОДА ВАЛКОВ ПРОКАТНОГО СТАНА | 1972 |
|
SU337173A1 |
| ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2523032C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074503C1 |
| Устройство для автоматического регулирования возбуждения синхронного двигателя преобразовательного агрегата | 1987 |
|
SU1451828A2 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2539631C1 |
| Устройство регулирования натяжения полосы в станах холодной прокатки | 1984 |
|
SU1227278A1 |
| Система совместного регулирования толщины и профиля полосы при прокатке | 1990 |
|
SU1731320A1 |
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ПРОКАТНОГО СТАНА | 2013 |
|
RU2544483C1 |
- {3
