чиков модуля упругости, ширины и толщины прокатываемой полосы и величины ускорения стана, а выход - с входом генератора тактовых импульсов и первым входом блока- запоминания, второй вход которого соединен с выходом генератора тактовых импульсов третий вход - с выходом задатчика величины ускорения стана, а выходы- с соответствующими входами цифро- аналогового преобразователя, выход которого соединен с входом блока. умножения, другой вход которого соединен с выходом вычисления величины установившейся динамической составляющей тока якоря двигателя мотал-. KHj, а выход - с входом регулятора тока якоря двигателя моталки.
2. Устройство по п, 1, отличающееся тем, что блок расчета кривой изменения динамичесрсой составляющей тока якоря двигателя моталки содержит пороговый элемент, генератор, блок постоянной памяти, первый узел вычисления, первый множительный блок, второй множительный блок, второй узел вычисления, тре- тий множительньш блок, первьй нелинейный преобразователь, второй нелинейный преобразователь, делитель, первый сумматор5 четвертый множительный блок, второй сумматор, пятый множительный блок, блок формирования импульсов, пороговый элемент, .причем выход генератора соединен с первым входом блока формирования импульсов и входом блока постоянной памяти, выход которого соединен с первым входом первого узла вычисления, второй вход которого соединен с выходом первого множи:тел ного блока, входы которого соединены с выходами задатчиков модуля упргости прокатываемой полосы и величины ускорения стана, выход третьег
I
Изобретение относится к автоматизации прокатного производства, а именно к устройствам регулирования натяжения полосы.
Целью изобретения является повышение точности регулирования натя множительного блока соединен с тре- тьим входом первого узла вычисления и первым входом второго узла вычисления, второй вход которого соединен с выходом первого множительного блока, третий вход - с вьпходом блока вьиисления радиуса рулона, четвертый и пятьй входы - с выходами задатчиков ширины и ТОЛ1ЦИНЫ прокатываемой полосы, шестой вход этого блока соединен с выходом блока постоянной памяти, а его выход - с входами первого и второго нелинейных преобразователей и первым входом делителя, второй вход которого соединен с выходом тахогенератора клетк, а выход - с ;пер1 ьц- входом четвертого множитель- iHoro блока,, BTi: p:jft зход которого соединен с вььхол.ом второго нелинейного преобразователя5 а выход - с ддним из вкодов первого сумматора, другой вход которого соединен с выходом первого нелинейного преобразователя, а вьпсод - с первым входом второго множительного блока, второй вход которого соединен с выходом первого узла вычисления, а выход - с входом второго сумматора, выход которого соединен с входом блока запоминания, первьм вход третьего множительного блока соединен с выходом блока вычисления радиуса рулона, а второй вход этого блока с выходом пятого мнолсительного блока, первый вход которого соединен с выходом задатчика модуля упругости прокатываемой полосы а второй вход - с выходом тахогенератора клети, вход порогового элемента соединен с выходом задатчика величины ускорения стана, а его выход с входом генератора и вторым входом блока формирования импульсов, выход которого соединен с входами генератора тактовых импульсов и б.пока запоминания.
жения полосы и сокращение числа обрывов ее в периоды ускорения и торможения стана.
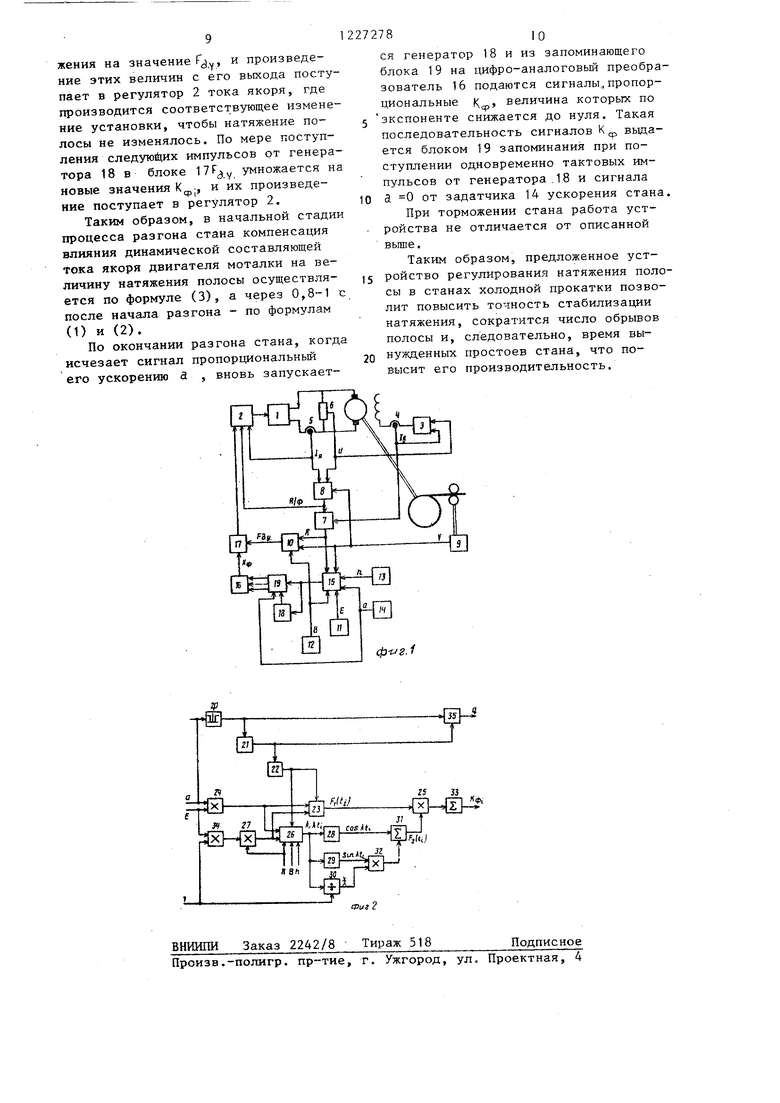
На фиг. 1 представлена блок-схема устройства регулирования натяжения полосы в станах холодной прокатки,
31
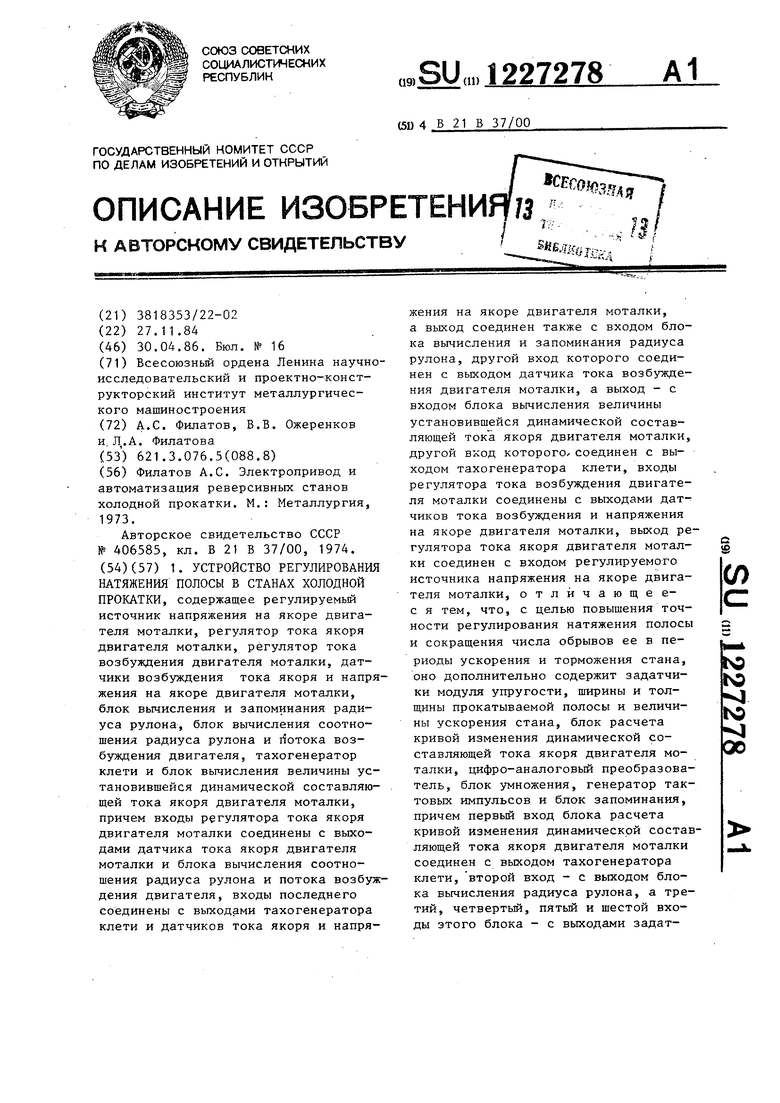
на фиг. 2 - структурная схема блока расчета кривой изменения динамической составляющей тока якоря двигателя моталки.
Устройство регулирования натяжени полосы в станах холод-ной прокатки содержит регулируемый источник 1 напряжения на якоре двигателя моталки, регулятор 2 тока якоря двигателя мо- талки, регулятор 3 тока возбуждения двигателя моталки, датчики 4,5 и 6 тока возбуждения, тока якоря и напряжения на якоре двигателя моталки, блок 7 вычисления и запоминания радиуса рулона, -блок 8 вычисления соотношения радиуса рулона и потока возбуждения двигателя, тахогенера- тор 9 клети, блок 10 вычисления величины установившейся динамической составляющей тока якоря двигателя моталки задатчики 11,12,13 и 14 модуля упругости,ширины и толщины прокатывае- ,мой полосы и величины ускорения стана, блок 15 расчета кривой изменения динамической составляющей тока якоря двигателя моталки, цифро-аналоговый преобразователь 16, блок 17 умножения, генератор 18 тактовых импульсов и блок 19 запоминания, причем входы регулятора 2 тока якоря двигателя моталки соединены с выходами датчика 5 тока якоря двигателя моталки и блока 8 вычисления соотношения радиуса рулона и потока возбуждения двигателя, входы последнего соединены с вьЕходами тахогенератора 9 клети и датчиков 5 и 6 тока якоря и напряжения на якоре двигателя моталки, а выход соединен также с входом блока 7 вычисления и запоминания радиуса рулона, другой вход которого соединен с выходом датчика 4 тока возбуждения двигателя моталки, а выход - с входом блока 10 вычисления величины установившейся динамической составляющей тока якоря двигателя моталки, другой вход которого соединен с выходом тахогенератора 9 клети, входы регулятора 3 тока возбуж
дения двигателя моталки соединены
с выходами датчиков 4 и 6 тока возбуждения и напряжения на якоре двигателя моталки, выход регулятора 2 тока якоря двигателя моталки соединен с входом регулируемого источника 1 напряжения на якоре двигателя моталки, первый вход блока 15 расчета кривой изменения динамической со
784
ставляющей тока якоря двигателя моталки соединен с выходом тахогенератора 9 клети, второй вход - с выходом блока 7 вычисления радиуса рулона, третий, четвертый, пятый и шестой входы этого блока - с выходами задатчиков 11,12,13 и 14 мо- дуля упругости, ширины и толщины прокатываемой полосы и величины ускорения стана, а выход - с входом генератора 18 тактовых импульсов и с входом блока 19 запоминания,другой вход которого соединен с выходом генератора 18 тактовых импульсов, третий вход - с выходом задат- чика 14 величины ускорения, а выходы - с соответствующими входами цифро-аналогового преобразователя 16, выход которого соединен с входом блока 17 умножения, другой вход которого соединен с выходом блока 10 вычисления величины установившейся динамической составляющей тока якоря двигателя моталки, а выход - с входом регулятора 2 тока в якорной цепи двигателя моталки.
Блок 15 расчета кривой изменения динамической составляющей тока якоря двигателя моталки содержит пороговый элемент 20, генератор 21, блок 22 постоянной памяти, первый узел 23 вычисления, первый множительный блок 24, второй множительный блок 25, второй узел 26 вычисления, третий множительньй блок 27, первый нелинейный преобразователь 28, второй нелинейный преобразователь 29, делитель 30, первый сумматор 31, четвертый множительный блок 32, второй сумматор 33, пятый ffloжитeльный блок 34, блок 35 формирования импульсов, причем выход генератора 21 соединен с первым входом блока 35 фор 5ирования импульсов и входом блока 22 постоянной памяти, выход которого соединен с первым входом первого узла 23 вычисления, второй вход которогосоединен с выходом первого множительного блока 24, входы которого соединены с выходами задатчиков 11 и 14 модуля упругости прокатыва- . емой полосы и величины ускорения стана, выход третьего множительного блока 27 соединен с третьим входом первого узла 23 вычисления и первым входом второго узла 26 вычисления, второй вход которого соединен с выходом первого множительного блока 24, третий вход - с выходом блока 7 вычисления радиуса рулона, четвертый и пятый входы - с выходами задатчи- ков 12 и 13 ширины и толщины прокатываемой полосы, шестой вход этого блока соединен с выходом блока 22 постоянной памяти, а его выход соединен с входами первого и второго нелинейных преобразователей 28 и 29 и первым входом делителя 30, второй вход которого соединен с выходом техогенератора 9 клети, а выход - с первым входом четвертого множительного блока 32, второй вход которого соединен с .выходом второго нелинейного преобразователя 29, а выход - с одним из входов первого сумматора 31, другой вход которого соединен с выхбдом первого нелинейного преобра- .зователя 28, а выход - с первым входом второго множительного блока 25,, второй вход которого соединен с выходом первого узла 23 вычисления, а выход - с входом второго сумматора 33, выход которого соединен с входом блока 19 запоминания, первый вход третьего множительного блока 27 соединен с выходом блока 7 вычисления радиуса рулона, а второй вход этого блока - с выходом пятого множительного блока 34, первый вход которого соединен с выходом задатчика 11 модуля упругости прокатываемой полосы а второй вход - с выходом тахогенератора 9 клети, вход порогового элемента 20 соединен с выходом задатчика 14 величины ускорения стана, а его .выход - с входом герератора 21 и .вторым входом блока формирования импульсов 35, выход которого соединен с входами генератора 18 тактовых импульсов и блока 19 запоминания.
Принцип работы устройства основан на следующем.
Компенсация влияния динамической составляющей тока электропривода моталки на натяжение полосы осуществляется в рассматриваемом устройств в соответствии со следующей зависимостью:, JR
С,
d.Y
г
Ф a.v.
(1,
2,,ci V dR
R
(2)
где I ч.. - установившееся значение
о. V
динамической составляющей двигателя моталки;
- установившееся значение
динамической составляющей натяженияJ
С . коэффициент пропорциональности между током и моментом двигателя; R - радиус рулонаJ Ф - поток возбуждения двигателя
Л - момент инерции привода, V - скорость прокатки, (л) - угловая скорость двигателя моталки.
Общее выражение для расчета изменения динамической составляющей тока привода моталки, как показано в (3)э равно
Ь г
1j 4aJl-e 4cosM Sin,t)J,
, l
(1)
- коэффищент пропорциональности между опережением и удельным натяжением; V - линейная скорость полосы; . радиус рабочего валка; f - расстояние от зоны деформации до точки касания полосой бунта
Y - момент инерции привода, при- веденньй к валу барабана моталки;
SQ- опережение металла при .отсутствии натяжения. Произведя необходимые действия на,ц величинами, неизменяющимися в процессе прокатки и опуская S ввиду малости, получим выражение для расчета коэффи1щёнта изменения формы кривой динамической составляющей тока двигателя моталки К,
Ф
,. -п, FR-V t-m V -- -е -(cosjit m,
W
где / 2%-a-E(1-tVH.;(-Y.R).n.6 vRat
Г %T 3 J ,
Как показали исследования, достаточно иметь значения через каждые 0,05-0,1 с до времени, равного 0,8- 1,0 с от начала пуска (торможения), когда переходньй процесс динамической составляющей тока якоря двигателя практически заканчивается, т.е. К становится рав ным единице.
Устройство работает следующим образом.
Толщину Ь , ширину В и модуль упругости прокатываемой полосы с помощью задат чиков 11,12 и 13 оператор задает до начала прокатки. Во время прокатки при скорости двигателя ниже основной ток возбуждения двигателя 1 поддерживается равным номинальному току. При-, скорости двигателя выше основной регулятор 3 тока возбуждения двигателя моталки по сигналу, поступающему от датчика 6 напряжения, ослабляет поток двигателя, поддерживая напряжение на якоре равным номинальному.
Для поддержания заданного натяжения полосы величина тока якоря 1 двигателя моталки, изменяется согласно формулам (1) и (2), Отношение . R/Ф вычисляется при помощи сигналов, поступающих от датчиков 5 и 6 тока якоря и напряжения на якоре двигателя моталки и тахогенерара 9 клети, сигнал которого пропорционален линейной скорости полосы V, в блоке 8, а радиус рулона R - в блоке 7, где используется для этого нелинейная зависимость потокаФ двигателя от тока возбуждения 1 . С учетом значений R , V и В в блоке 10 производится расчет сигнала F у для компенсации динамической составляющей тока якоря дви.гателя, которьй в блоке 17 умножается на коэффициент формы кривой изменения динамической составляющей тока якоря двигателяК, поступающий с выхода цифро-аналогового преобразователя 16, Причем значение Кф в установившихся режимах равно единице.
При появлении сигнала, пропорционального ускорению стана, на выходе задатчика 14 пороговьй элемент 20 вьщает сигнал, запускающий генератор 21, который генерирует последовательность из 8 или 10 импульсов. Каждый импульс подключает соответствующие ячейки блока 22 постоянной памяти, в которых хранятся величины i..,t jl-f (t время от начала
2272788
пуска стана, причем t- -i-,-0,05- 0,1 с), к входам первого 23 и второго 26 узлов вычислений. В первом
узле вычисления по величинам t- и
I j
5 произведениям модуля упругости Е полосы на ускорение 3 , которое поступает с выхода первого множительного блока 24, и модуля упругостиЕ , скорости стана V и радиуса рулона R,
0 которое поступает из третьего множительного блока 27, рассчитываются величины .)e iEVRt-h,aEt g
втором узле 26 вычисления по сигналам Ц i-t E tt ,EVft , &N Ь, R-n которые поступа 5 ют соответственно t выходов блока 22 постоянной памяти, первого множительного блока 24, третьего множительного блока 27, задатчиков 12 и 13 ширины и толщины прокатываемой
2Q полосы и блока, 7 определения радиуса рулона, рассчитываются величины А,/it) по которым, а также величине , сигнала, поступающего от тахогенера- тора 9 клети и пропорционального
25 скорости стана V , с помощью нелинейных преобразователей 28 и 29, делителя 30, четверто о множительного блока 32 и первого сумматора 31 вычисляются суммы
30
F (t )Cos,t.-m --SinAt. .
t t1 AI
Bo втором множительном блоке 25 вычисляются пpoизвeдeнияF(t j-J-F vt;) , а второй сумматор 33 формирует значения коэффициентов формы кривой изменения динамической составляющей тока якоря двигателя моталки К -.
По заднему фронту каждого импульса, вьгработанного генератором 21, производится перезапись значения Кф|
с выхода второго сумматора 33 в блок; 19 запоминания. Кроме того, по заднему фронту первого импульса генератора 21 в блоке 35 формирования импульсов вырабатьшается сигнал с, , по
которому запускается генератор 18 тактовых импульсов. Сигнал cj, запуска генератора тактовых импульсов вьфаба- тызается также при окончании разгона (торможения) стана, как только
ускорение 3 становится равным нулю, пороговым элементом 20 и блоком 35 формирования импульсов.
При- поступлении первого импульса из генератора 18 с выходов блока 19
запоминания информации, соответствующая первому значению К поступает в ДАЛ 16. Аналоговый сигнал с выхода ЦАП умножения в блоке 17 умножения на значение Г произведение этих величин с его выхода поступает в регулятор 2 тока якоря, где производится соответствующее изменение установки, чтобы натяжение полосы не изменялось. По мере поступления следуюй1их импульсов от генератора 18 в блоке Mf уг ножается на новые значения , и их произведение поступает в регулятор 2.
Таким образом, в начальной стадии процесса разгона стана компенсация влияния динамической составляющей тока якоря двигателя моталки на величину натяжения полосы осуществляется по формуле (3), а через 0,8-1 с после начала разгона - по формулам (1) и (2).
По окончании разгона стана, когда исчезает сигнал пропорциональньй его ускорению а , вновь запускается генератор 18 и из запоминающего блока 19 на цифро-аналоговьш преобразователь 16 подаются сигналы., пропорциональные Кф величина которых по
экспоненте снижается до нуля. Такая последовательность сигналов К выдается блоком 19 запоминания при поступлении одновременно тактовых импульсов от генератора . 18 и сигнала
а 0 от задатчика 14 ускорения стана.
При торможении стана работа уст- ройства не отличается от описанной вьше.
Таким образом, предложенное устройство регулирования натяжения полосы в станах холодной прокатки позволит повысить точность стабилизации натяжения, сократится число обрывов полосы и, следовательно, время вынужденных простоев стана, что повысит его производительность.
ф-tJg. f
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения полосы на моталке листопрокатного стана | 1982 |
|
SU1041188A1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПОЛОСЫ НА МОТАЛКЕ ПРОКАТНОГО СТАНА | 1972 |
|
SU342699A1 |
| Устройство автоматического регулирования толщины прокатываемой полосы | 1980 |
|
SU929264A1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПОЛОСЫ НА МОТАЛКЕ ПРОКАТНОГО СТАНА | 1973 |
|
SU406585A1 |
| Устройство автоматического торможения реверсивного стана холодной прокатки | 1980 |
|
SU937070A1 |
| Устройство для регулирования толщины полосы на одноклетьевом стане холодной прокатки | 1989 |
|
SU1639818A1 |
| Устройство для управления скоростью механизмов стана холодной прокатки | 1977 |
|
SU692645A1 |
| Устройство для регулирования натяжения полосового материал | 1976 |
|
SU568471A1 |
| Устройство автоматического торможения реверсивного стана холодной прокатки | 1990 |
|
SU1787478A1 |
| Устройство для регулирования натяже-Ния пОлОСы пРи CMOTKE B РулОН | 1979 |
|
SU850243A1 |
Фиг 2
ВНИИПИ Заказ 2242/8 Тираж 518
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
Подписное
| Филатов А.С | |||
| Электропривод и автоматизация реверсивных станов холодной прокатки | |||
| М.: Металлургия, 1973 | |||
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПОЛОСЫ НА МОТАЛКЕ ПРОКАТНОГО СТАНА | 0 |
|
SU406585A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
