ИззестнУ |И1Мпульсные интеграторы, содержащие устройство ввода величины рассогласования и настроечный орган времени интегрирования. I
Предложенный импульсный интегратор отЛнчается тем, что в «ем установлен блок настроек скоростей интегрирования, выполненный в виде барабана (ось барабана закреплена на водиле устройства для сравнения Сигналов), с приводом от общего синхронного двигателя через шестеренчатый планетарный механизм с установленными по периметру микрометрическими винтами, снабженными пластлнчатыми секторами. Блок через генератор угла поворота с фиксированной ординатой, выполненный в виде кулачка с приводом от общего синхронного двигателя и рычага с ощупьщателем пластинчатых секторов блока настроек скоростей интегрирования, которые установлены на шестеренчатом секторе, и через генератор небаланса, выполненный в виде многоканального планетарно-фрикпионного суммирующего механизма, состоящего из центрального фрикциона, закрепленного на общей втулке с шестерней (последняя сцеплена с сектором), водила с установленными на нем фрикционными каретками-сателлитами ;С подвижными осями (каретки соединены детектирующими кинематическими цепями с функциональными кулачками, расположенными по периметру с колнчеством, -ра&нъш числу каналов интегрирования), расцепляющего диска с вырезом, закрепленного в корпусе прибора и блокирующего рычага, на котор.ом
установлены пластинчатый сектОр и ось с подшипником, связанным с функциональным кулачком, подключен к исполнительному устройству, j Такое выполнение устройства позволяет
формировать интегральные посылки ,и повышать точность интегрирования отклонений сигналов в устройствах многоточечного регулирования.
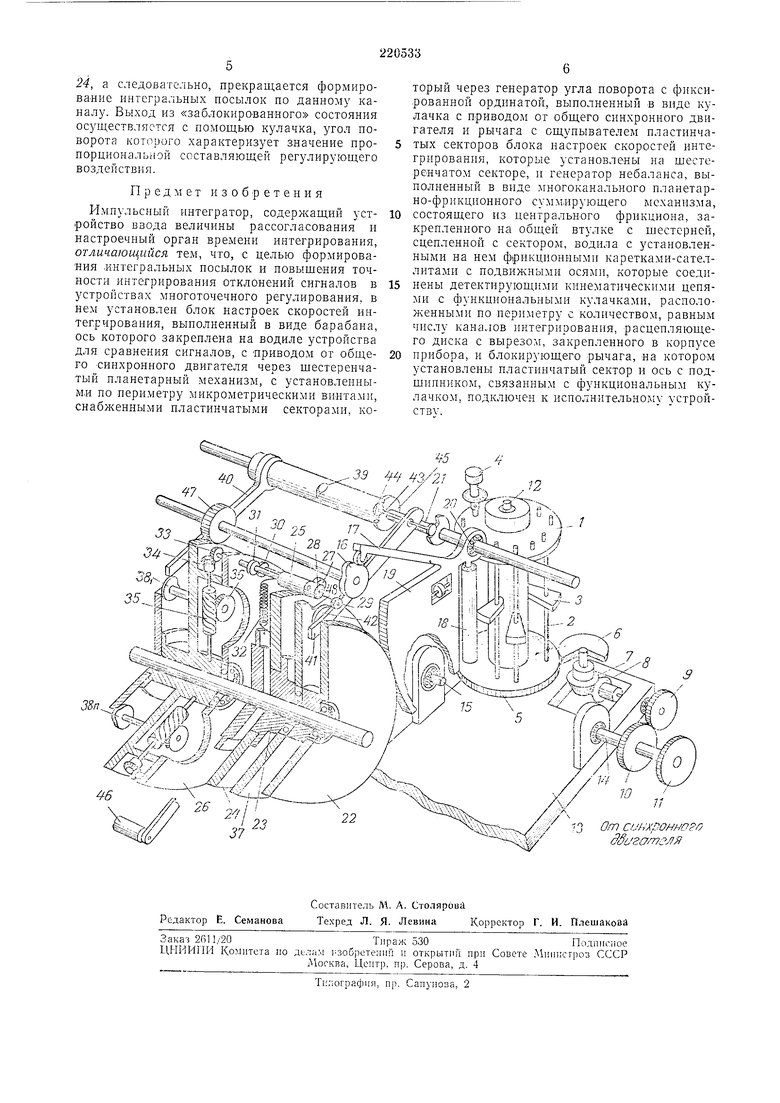
На чертеже изображен импульсный интегратор.
Импульсный интегратор содержит блок настроек скоростей интегрирования, состоящий из барабана /, микрометрических винтов 2,
пластинчатых секторов 3, ключа 4 и планетарного механизма, включающего шестерни 5, 6, 7, 8, 9 н 10.
Привод осуществляется от общего синхронного двигателя через шестерню 11. Ось 12
вращения барабана / закреплена на водиле 13, углы поворота которого относительно полуосей 14 и 15 характеризуют величины рассогласования. На барабане / поворотам микрометричеваются заданные значения коэффициентов скоростей интегрирования.
Генератор угла поворота с ф;иксированной ординатой состоит из кулачка 16, рычага 17 и ощупывателя 18, установленных на шестеренчатом секторе 19, который монтируется на нодшипнике 20 оси 21.
Генератор небаланса для генерирования и накопления интегральных посылок, представляющих собой произведения величин рассогласования на коэффициенты скоростей интегрирования, выполнен в виде многоканального плапетарно-фрикционного суммирующего механизма и состоит из шестерни 22 для ввода углов поворота от генератора, втулки 23 для соединения шестерни 22 с центральным фрикционом 24, кареток-сателлитов 25 установленных «а водиле 26, с количеством, равным числу каналов интегрирования, включающих малые фрикционы 27, шкалы 28, расцепляющие подшипники 29 для сцепления и расцепления фрикционов 24 и 27, шестерни 30 и 31, пружины 32, конические шестерни 33 и 34, детектирующие пространственные передачи, включающие червяки 35 и червячные шестерни 36, а также расцепляющего диска 37 для поочередного сцепления кареток-сателлитов 25 с центральным фрикционом 24. В конце кинематических цепей кареток-сателлитов 25 установлены функциональные кулачки 38, выполняющие роль интегрирующих ячеек.
Пневмопреобразователь 39 с помощью рычага 49 поочередно преобразовывает углы поворота функциональных кулачков 38 в давление сжатого воздуха.
Блокирующий механизм служит для блокирования работы генератора небаланса, когда угол поворота рычага 40 превышает рабочий диапазон. Механизм состоит из блокирующего рычага 41 с закрепленными на нем пластинчатым сектором 42 и осью 43, снабженной подщипником 44, кулачка 45 для ввода угла поворота от пневмопреобразователя 39 и оси 46, по отнощению которой поворачивается рычаг 4L .
Формирование интегральных посылок осуществляется путем суммирования углов поворота на фрикционах 24 и 27.
a ai-«2,
где а -т- суммарный угол поворота фрикциона 27;
cxi - угол поворота фрикциона 27, получающийся под действием перекатывания его ,по центральному фрикциону 24, его величина определяется по формуле ai pi-i, где ф - угол сцепления и tl - передаточное
отношение ф1р.икционов 24 и 27; «2 - угол поворота фрикциона 27, трансформируемый генератором угла -поворота; его величина определяется по формуле 0,2 iik,
При величине рассогласования Ае 6 и соответствующем выборе величин 9,ti, P,i2 можно получать величину интегральной посылки:
а cci-а-2 (fii-pti/2 О, при «2 0; a ai, при a2 2ai; а -ccj.
Ощупыватель 18, качаясь от кулачка 16 генератора угла поворота, снимает углы поворота р, зависящие от углов поворота водила 13 и
положения секторов 3 по высоте барабана /, которые вводятся в генератор небаланса шестерней 22 и центральным фрикционом 24.
Импульсный интегратор работает следующим образом.
Вращающиеся от общего синхронного двигателя через планетарный механизм, включающий шестерни 5, 6, 7, 8, 9, 10 и //, барабан 1, через шестерню 47 водило 26 и кулачок 16 поочередно замыкают кинематические цепи от
водила 13 до пневмопреобразователя 33 через соответствующие секторы 5i,... 3„, фрикционные каретки-сателлиты 25i,... 25„ , с расцепляющими подщипниками 29i,...29 и функциональные кулачки 38,... 38„ .
При наличии рассогласования в первом объекте водило 13 поворачивается совместно с барабаном / на соответствующий угол.
Синхронный двигатель через шестерни 11, 10, 9 ,8, 7, 6 и 5 поворачивает барабан / сектором Si под Ощупыватель 18, который под
действием кулачка 16, сектора 19, щестерни
22 и центрального фрикциона 24 поворачивает
ф)рикцион 27i на угол ocg.
В это время подшипник 29 находится против выреза 48 в расцепляющем диске 37 и под действие.м пружины 32i происходит сцепление фрикционов 24 и 27.
В то же время фрикцион 27, установленный вместе с кареткой-сателлитом 25 на вращающемся водиле 26, перекатывается по центральному фрикциону 27 на угол «i, величина которого постоянна и регламентирована длиной выреза 48 в расцепляющем диске 37. Суммарный угол поворота ее посредством кинематической цепи, состоящей из фрикциона 27i, цилиндрических шестерен 30 и 5/ь конических шестерен 33i и 34, червяка 35 и червячной шестерни 36, трансформируется и фиксируется в виде угла поворота функционального
кулачка 38 и с помощью рычага 4(9 нередает-ся на Пневмопреобразователь 39 для преобразования в давление сжатого воздуха. При опускании сектора 19 с рычагом 17 и ощупывателем 18 фрикционы 24 и 27 расцепляются и
вращение на каретку-сателлит 25 не пере-; дается.;
При выходе рычага 40 из рабочего диапазона углов поворота кулачок 45 одним из своих скосов посредством подщипника 44 и оси
поворачивает блокирующий рычаг 41 против часовой сгрелки по отношению оси 46 и пластинчатым сектором 42 закрывает вырез 48 в расцепляющем диске 37. В этом- случае; каретка-сателлит 25 не сцепляется своим;
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНЫЙ ДИФФЕРЕНЦИАТОР | 1969 |
|
SU250540A1 |
| ИМПУЛЬСНЫЙ ИНТЕГРАТОР | 1969 |
|
SU247536A1 |
| ИМПУЛЬСНЫЙ ИНТЕГРАТОР | 1973 |
|
SU408320A1 |
| Полуавтомат для отделки резинометаллических пластинчатых амортизаторов | 1959 |
|
SU126001A1 |
| ПРИВОД РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ ТКАЦКОГО СТАНКА | 1990 |
|
RU2009282C1 |
| Кресло-коляска для инвалидов | 1988 |
|
SU1630822A1 |
| УСТРОЙСТВО для ПРОПОРЦИОНАЛЬНОГО ПРЕОБРАЗОВАНИЯ ВЕЛИЧИН РАССОГЛАСОВАНИЯ | 1967 |
|
SU204025A1 |
| ДИСКОВЫЙ ПЛАНЕТАРНЫЙ ВАРИАТОР | 2008 |
|
RU2384774C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПОРНО-РЕГУЛИРУЮЩИМ ОРГАНОМ ТРУБОПРОВОДНОЙ АРМАТУРЫ И СПОСОБ НАСТРОЙКИ ЕГО ОГРАНИЧИТЕЛЯ МАКСИМАЛЬНОГО КРУТЯЩЕГО МОМЕНТА | 2005 |
|
RU2273784C1 |
| КОЛОВРАТНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1990 |
|
RU2026498C1 |
