Известны установки для динамической балансировки роторов на выбеге, содержащие блок управления, блок измерения величины неуравновешенности, блок измерения углового положения неуравновешенности, индукционные датчики и фотодиодный датчик, блок И3 мерения скорости вращения и блок электрического эталонирования.
Предложенная установка отличается от известных тем, что она снабжена квариевым генератором и триггериым счетчиком, на входы которого подаются импульсы с кварцевого геиератора и опорные импульсы с фотодиодного датчика, а с выхода, в период выбега, снимается импульс иа блоки измерения величины и углового положения неуравновешенности, служаи1,ий сигналом для автоматической фиксации измеряемых величин. Блок измерения углового положения неуравновешенности выполнен в впде цифрового фазометра с использованием калиброванных и.мпульеов с кварцевого генератора.
Это позволяет иовысить точность определения момента измерения, когда частота вращения ротора равна частоте настройки блоков измереиия величины и углового положения неуравновен енности, а также повысить точиость измереиия углового иоло}кения неуравновещениости.
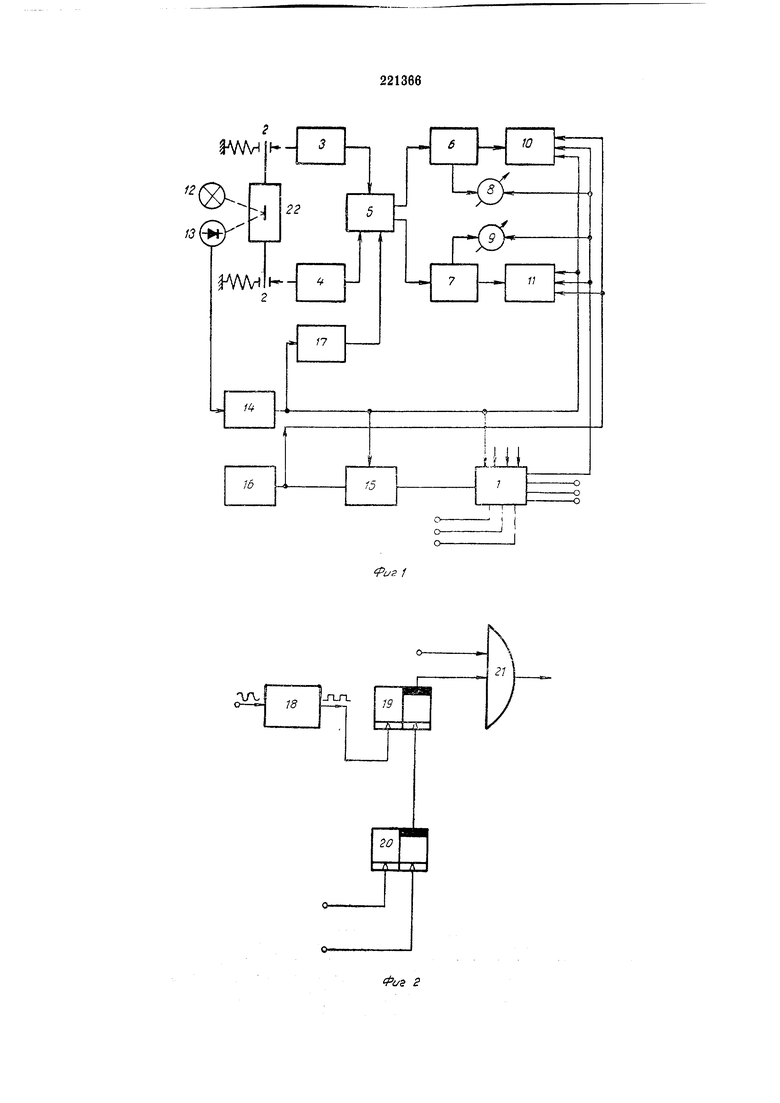
емой устаиозки; на фиг. 2 - схема блока измереиия углового положення неуравновешенности.
Установка состоит из блока / управления, подвижных опор 2, индукционных датчиков 3 и -i, блока 5 настройки, избирательных усилителей 6 и 7. приборов S и 5 показаиия величины неуравновешенности, блоков 10 и 11 измереиия углового положен1 Я иеуравновешеиности, лампы 12 подсвета, фотодиода 13, форм11рователя 14 опорных импульсов, блока 15 измерения скорости вращения, кварцевого генератора 16, блока 17 электрического эталонирования, формирователя 18, триггеров
19 и 20, каскада 2/ совиадения.
Устанока работает следующим образом. Пусковым устройствол блока / управления включается питание привода уравновешиваемого изделия 22.
Перемещеиие иодвижиых опор 2 преобразуется индукциониыми датчиками 5 и 4 в электрический сигнал, который через блок 5 настройки и избирательные усилители б и 7 подается на нриборы S и 9 показания величины неуравновещенности и на блоки 10 и 11 измерения углового положения неуравновешенности.
ские импульсы, которые формируются в опорные импульсы формирователем 14 и подаются на блок 15 измерения скорости вращения. На другой вход блока 15 подаются импульсы с кварцевого генератора 16 с частотой в 360 раз большей, чем частота настройки избирательных усилителей 5 и 7.
Блок 15 работает так, что пока скорость вращения ротора меньше частоты настройки измерительной системы, на его выходе есть импульсы, а как только скорость вращения превысит частоту настройки системы, нмпульсы пропадут. В этот момент блок 1 управления выключит привод уравновешиваемого изделия. С некоторой задерл кой, которая задается блоком / начинается выбег уравновешиваемого изделия. Первый появившийся импульс на выходе блока 15 является импульсом разрешения отсчета и иосредством блока / производит фиксацию углового положения неуравновешенности на блоках 10 и //. Блок 17 эталонирования формирует из опорного импульса прямоугольный импульс, основная составляющая которого равна по величине и противоположна по фазе сигналу датчиков 3 и 4. Сигнал с датчиков и сигнал с блока 17 подаются на вход избирательных усилителей, создавая нуль измерительиой системы, что как бы соответствует эталонному ротору.
Работает блок измерения углового положения неуравновешенности следующим образом.
Сигнал с избирательного усилителя 6 подается на формирователь 18, который формирует импзльс тяжелого места и иодает его на вход триггера 19. На один вход триггера 20 подается опорный импульс, на другой -: импульс разрешения отсчета. Нри появлении импульса разрешения отсчета триггер 20 перебрасывается, а при появлении опорного импульса возвращается в исходное положение. Триггер 20 сигналом выхода перебрасывает триггер 19, который возвращается в исходное положение импульсом, сформированным из сигнала избирательного усилителя 6. На выходе триггера 19 получается временной импульс, начало которого соответствует 5 появлению опорного импульса, а конец - импульса тяжелого места. На время действия этого импульса открывается каскад 21 совпадения, который пропускает импульсы от кварцевого генератора 16. Так как частота
0 кварцевого генератора 16 в 360 раз больше скорости вращения ротора, то число импульсов на выходе каскада 21 совпадения соответствует угловому положению неуравновешенности в градусах.
Предмет изобретения
Установка для динамической балансировки роторов на выбеге, содержащая блок управления, блок измерения величины неуравновешенности, блок измерения углового положения неуравновешенности, индукционные датчики и фотодиодный датчик, блок измерения скорости вращения и блок электрического
5 эталонирования, отличающаяся тем, что, с целью повышения точности определения момента измерения, когда частота вращения ротора равна частоте настройки блоков измерения величины и углового положения неуравновешенности, а также повышения точности измерения углового положения неуравновешенности, она снабжена кварцевым генератором и триггерным счетчиком, на входы которого подаются импульсы с кварцевого
5 генератора и опорные импульсы с фотодиодного датчика, а с выхода, в период выбега, снимается импульс на блоки измерения величины и углового положения неуравновешенности, служащий сигналом для автоматической
фиксации измеряемых величин, а блок измерения углового положения неуравновешенности выполнен в виде цифрового фазометра с использованием калиброванных импульсов с кварцевого генератора.
-П-Л.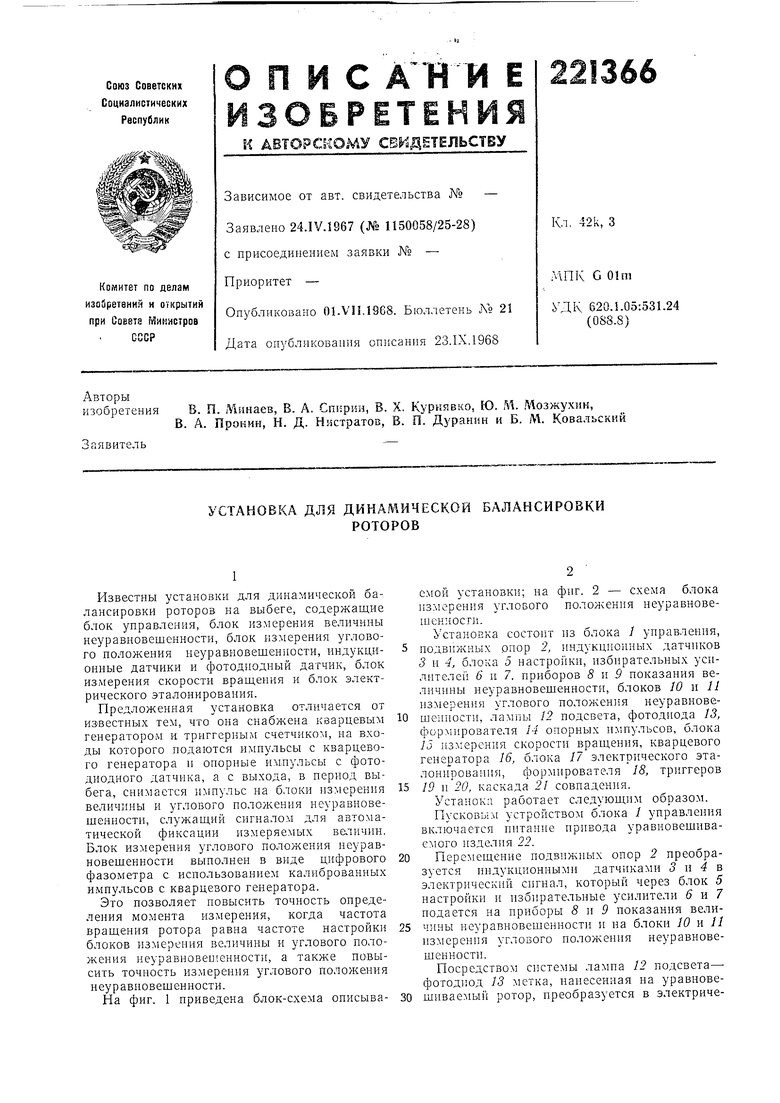
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ НЕУРАВНОВЕШЕННОСТИ | 1971 |
|
SU310150A1 |
| Измерительное устройство к балансировочному станку | 1971 |
|
SU503155A1 |
| Измерительное устройство к балан-сировочному станку | 1971 |
|
SU508702A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУСТАНКУ | 1971 |
|
SU307293A1 |
| ПАТЕНШ-ТЕШ«1!ШЯ БИБЛИОТЕКА | 1973 |
|
SU395788A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАПРАВЛЕНИЯ ВЕКТОРА МАГНИТНОГО ПОЛЯ ЗЕМЛИ В БУКСИРУЕМОЙ ГОНДОЛЕ | 1973 |
|
SU409176A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| Измерительное устройство балансировочного станка | 1976 |
|
SU581407A1 |
| Устройство для измерений дисбаланса роторов | 1981 |
|
SU1017937A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208771C2 |