1
Изобретение относится к области геофизики и может быть использоваио в системах сбора геофизической информации для получения угла склонения магннтного поля Земли в дискретной форме и с высокой точностью, а также передачн информацнн об угле склонения из буксируемого объекта (гондолы) на борт корабля-буксировщика по ограпиченнощ числу лиинй связи.
Известны соответствуюндие устройства (курсовые системы), со;1,ержан 1,не феррозондовый датчик, сельснп, отрабатывающий двнгатель и усилитель рассогласования. Однако информацня об угле склонення магнитного поля Земли (МПЗ) в них представлена в виде утла поворота указателя курса. Такое представлеиие информации не удобно с точки зрения возможности нреобразовапия ее в цифровую форму ДЛЯ автоматизацин обработки с прнменением цифровой машины. Иснользование токового выхода сельсина также не решает проблемы, поскольку требует большого числа лнний связи (не менее трех) и не обеспечивает достаточной точности (не выше единиц угловых градусов).
Цель изобретения - иолученне угла склонения в виде, удобном для непосредственного ввода в цифровую машииу, повышение точности измерепий и сокращеиие числа лииий связи с цифровой машииой до одиой.
Цель достигается путем введеиия в устройство указателя оси гоидолы, кварцевого генератора с делителем частоты, дискриминатора пулевого уровпя и селектора со схемой управления.
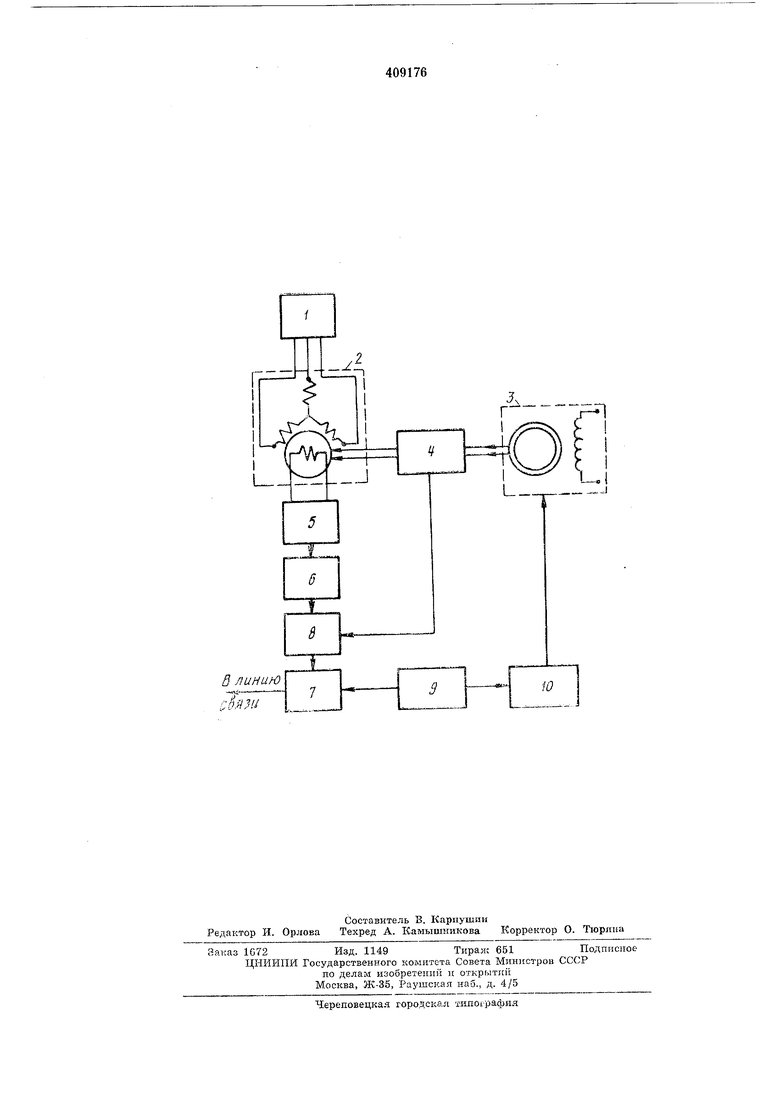
На чертеже нредставлеиа блок-схема предлагаемого устройства.
Устройство состоит из феррозопдового датчика /, сельсина 2, синхронного двигателя 3, индикатора 4 оси гондолы, усилителя 5 рассогласовання, дискриминатора 6, селектора 7 со схемой cS управления и кварцевого геиератора 9 с делителем W частоты.
Работает устройство следуюи1,им образом.
При изменеиии курса гондолы меняется положенне феррозондового датчнка / относнтельно магнитного мерндиана, поскольку он установлен так, что повторяет поворот гондолы в горизонтальной плоскости. Это нриводит к изменению напряжений на выходах феррозопдового датчика /, н, следовательно, к изменеппю соотношения токов в статорных обмотках сельсина 2. Паправление результпруюн1.его jMarHHTHoro потока сельсина 2 изменяется, п в роторной обмотке наводится э.д. с., амилитуда которой пропорциональна углу поворота ГОНДОЛЫ. Напряжение с выхода роторной обмотки сельсина 2 поступает на вход уснлптеля 5 и далее через дискриминатор нулевого уровня на однп нз входов схемы управлення
селектором. Синхронный двигатель 3, питающийся стабильной частотой кварцевого генератора 9 через делитель частоты 10, враидает ротор сельсниа 2 со строго постоянной скоростью. Ма осп, соединяющей выход двпгателя 3 с ротором сельсина 2, установлен индпкатор 4 осп гондолы. В момент, когда угловое положение ротора сельсииа 2 соответствует направлению оси гопдолы вдоль магнитного мерпдиапа, на выходе индикатора 4 появляется импульс, открывающий селектор 7 через схему управления 8, и импульсы кварцевого генератора начпнают нроходпть в линию связи. При дальнейшем вращении ротора сельсипа 2 в момент нрохождения им нолол епия, соответствующего нулевому (минимальному) сигналу па обмотке ротора сельсина (что отвечает совпадению положения оси датчика / с магнитным меридианом), на выходе дискриАгннатора нулевого уровня появляется сигнал, закрывающий селектор 7. Таким образом, число нмпульсов /V, поступивших в линию связи от кварцевого генератора 9 через селектор 7, равно
-Я;/0
360/i
где С . - уго.1 склонения МПЗ, град, f - частота кварцевого генератора, гц, п - скорость врап1,ения ротора сельсина, об/сек. Эти импульсы поступают но линии связи на вход счетчика, яа выходе которого получают код, иропорциопальпый углу склонения МПЗ. Этот ко,, может быть подан непосредственно на пхс)дпые пить; ЭЦВМ, нроизводяи;ей операт вную обработку получаемой информации.
Точ 1ость измерення угла склонения в данном случае определяется стабильностью кварцевого генератора (поскольку скорость вра1ценкя синхронного двигателя зависит только от частоты кварцевого генератора), точностью работы ннднкатора оси гондолы н дискриминатора нулевого уровня.
Предлагаемое устройство позволяет значительно новыснть точность измерения угла склонения в буксируемой гондоле, а применение число-и.мпульсного метода передачи ннформации уменьшает число необходи п х линий связи буксируемой гондолы с кораблсмбуксировщиком.
П р е д м е т и з о б р е т е и и я
Устройство для измереиия направления вектора магнитного поля Земли в буксируемой гондоле, содержащее феррозондовый датчик, сельсин, линии связи, синпронный двигатель и усилитель рассогасования, отличающееся тем, что, с целью нолучения угла склонения в виде, удобном для непосредственного ввода в электронно-цифровую вычислительную машииу и одновременного сокращения числа линий связи, в него введены индикатор оси гондолы, кварцевый генератор с делителем частоты, дискриминатор нулевого уровня и селектор «о схемой управления, один из входов которой подключен к выходу индикатора оси гондолы, а другой вход соединен через дискриминатор нулевого уровня с выходом усилителя рассогласования, при этом выход кварцевого генератора через селектор подключен к линии связи, а также через делитель частоты к входу синхроиного двигателя.
В линию г
.
L:
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОГО СКЛОНЕНИЯ НА МОРЕ | 1990 |
|
RU2069876C1 |
| Способ измерения магнитного склонения и устройство для его осуществления | 1986 |
|
SU1343372A1 |
| Устройство для измерения слабых геомагнитных полей | 1986 |
|
SU1347063A1 |
| Устройство для аэрогеофизическойРАзВЕдКи | 1979 |
|
SU805232A1 |
| Цифровая система измерения глубинного положения морской пьезосейсмографной косы | 1976 |
|
SU894640A1 |
| Способ измерения магнитного склонения | 1973 |
|
SU499541A1 |
| ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ | 1971 |
|
SU301397A1 |
| ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЯМИ | 1972 |
|
SU341898A1 |
| ИМИТАТОР КАНАЛА УГЛА СНОСА САМОЛЕТНОЙ РЛС | 1963 |
|
SU155193A1 |
| МАГНИТНАЯ ВАРИАЦИОННАЯ СТАНЦИЯ | 1991 |
|
RU2008702C1 |