Изобретение относится к области измерительной техники и может быть использовано для автоматического измерения параметров неуравновешенности роторов изделий точного приборостроения.
Известны устройства для автоматического измерения неуравновешенности роторов на выбеге, содержаш,ие механическую подвижную систему и электронное измерительное устройство, в состав которого входят два блока измерения величины неуравновешенности, два блока измерения угла, генератор эталонной частоты, фотодиодный датчик опорного сигнала и блок управления циклом измерения.
Недостаток известного устройства состоит в том, что для контроля скорости враш,ения ротора в процессе измерения оно содержит специальный блок измерения скорости, что усложняет электрическую схему измерительного устройства.
Предлагаемая установка отличается от известных тем, что блок управления циклом измерения снабжен коммутируюш,им устройством, обеспечиваюшим в режиме измерения скорости вращения ротора поочередное, через оборот ротора, подключение входов блока измерения угла одновременно к выходу генератора эталонной частоты и к выходу фотодиодного датчика опорного сигнала, а в режиме измерения углового положения неуравновешенности - подключение одних входов каждого из блоков измерения угла к выходу генератора эталонной частоты, а других - к
выходам блоков измерения величины неуравновешенности.
Эти отличия позволяют упростить электрическую схему измерительного устройства, повысить надежность его работы и снизить требования по быстродействию к элементам электрической схемы блоков угла.
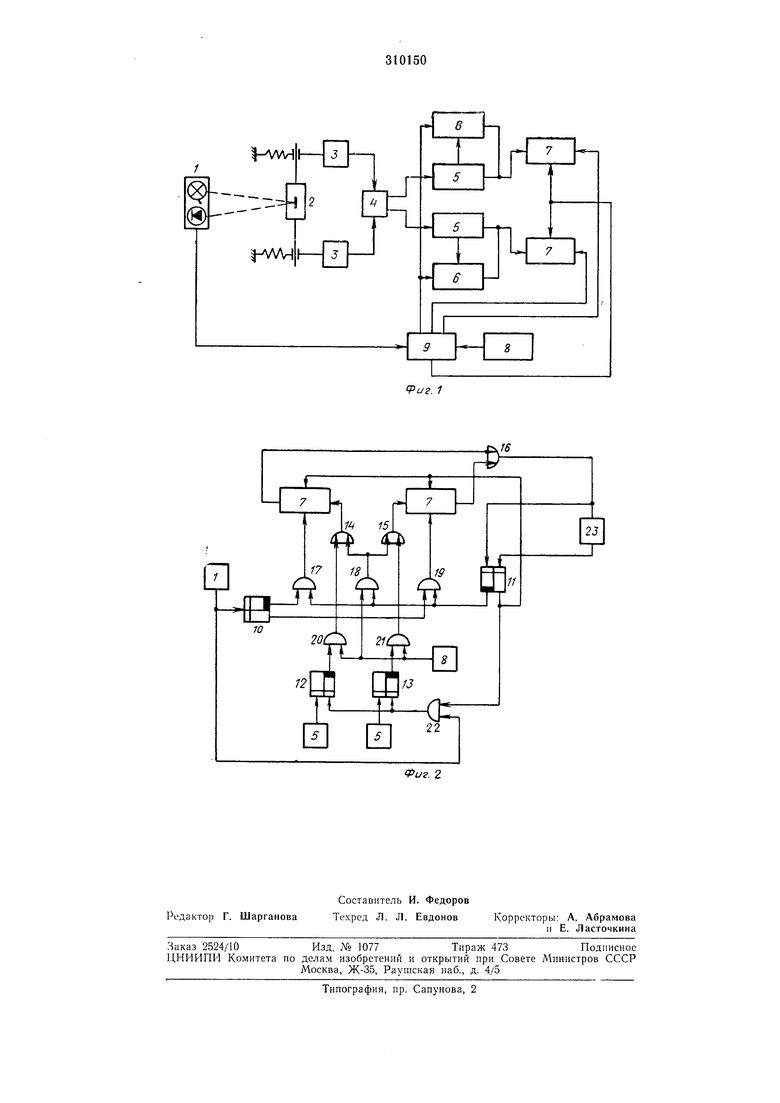
На фиг. 1 изображена блок-схема описываемой установки; на фиг. 2 - схема переключающего устройства.
Установка содержит фотодиодный датчик Л подвижную механическую систему с уравновешиваемым ротором 2, индукционные датчики 3, блок 4 взаимного исключения влияния плоскостей уравновешивания, блоки 5 измерения величины неуравновешенности, блоки 6 запоминания величины неуравновешенности, блоки 7 измерения и фиксации угла, генератор эталонной частоты 8, блок 9 управления циклом измерения.
Переключающее устройство содержит триггеры 10-13 (фиг. 2), собирательные схемы 14-16, каскады совпадения 17-22 и узел 23 включения автоматического цикла.
электрический сигнал, который через блок 4 взаимного исключения влияния нлоскостей уравновешивания поступает на входы блоков 5 измерения величины неуравновешенности и далее на входы блоков 6 запоминания величины неуравновешенности, представляющих собой цифровые вольтметры, которые но командам блока 9 управления циклом измерения на выбеге фиксируют напряжение сигнала неуравновешенности.
Автоматический цикл измерения осуществляется следующим образом. Пусковым устройством узла 23 включения автоматического цикла включается нитание привода уравновешиваемого ротора 2; ротор начинает набирать обороты. Триггер 11 при этом устанавливается в такое положение, при котором открываются каскады совпадения 17-19, а каскад совпадения 22 закрывается и не пропускает опорные импульсы с фотодиодного датчика / на входы триггеров 12 и 13. Триггеры 12 и 13 устанавливаются в такое состояние, при котором каскады совпадения 20 и 21 закрываются.
Импульсы с генератора эталонной часготы S через открытый каскад совпадения 18 и собирательные схемы 14 и 15 подаются на счетные входы блоков 7. Счетная часть блока 7 выполнена в виде счетчика с емкостью счета в 360 импульсов. Сброс счетчиков блоков 7 измерения и фиксации угла в нулевое состояние осуществляется попеременно от импульсов, снимаемых с выходов триггера 10 через открытые каскады совпадения 17 и 19. В то время, как один из блоков 7 удерживается в нулевом состоянии, другой заполняется импульсами генератора эталонной частоты 8.
При наборе оборотов ротора 2 на выходах блоков 7 попеременно появляются импульсы переполнения, которые через собирательную схему 16 воздействуют на узел 23 включения автоматического цикла, поддерживая его в состоянии, сообщенном ему вначале пусковым устройством.
В момент совпадения скорости вращения ротора 2 с частотой настройки, импульсы с выходов блоков угла 7 перестают поступать на собирательную схему 16. Узел 23 включения автоматического цикла выключается и отключает питание привода ротора. Отключение питания привода ротора осуществляется с некоторой задержкой, поэтому ротор набирает обороты несколько выше, чем частота настройки. После отключения узла 23 триггер 11 становится управляемым с выхода собирательной схемы 16.
Когда на выбеге скорость врашения ротора становится равной частоте настройки, на выходе блока 7 появляется импульс, переключающий триггер 11. При этом каскады совпадения 17-19 закрываются, и работа блоков
угла 7 в режиме измерения скорости вращения ротора прекращается.
Влоки угла 7 переключаются в режим измерения углового положения неуравновешенности.
При срабатывании триггера /У открывается каскад совнадения 22, в счетчики блоков 7 вводится число, соответствующее коррекции фазовой погрешности измерительного тракта.
После открывания каскада совпадения 22 ближайший опорный импульс метки на роторе, снимаемый с фотодиодного датчика 1, переключает триггеры 12 и 13, которые открывают каскады совпадения 20 и 21. Через каскады совпадения на входы блоков 7 поступают импульсы с генератора эталонной частоты 8 до момента, когда с блоков 5 измерения величины неуравновешенности появляется сигнал, соответствующий тяжелому месту на роторе. Триггеры 12 и 13 возвращаются в исходное положение, каскады совпадения 20 и 21 закрываются, и занолнение счетчиков блоков 7 импульсами с генератора эталонной частоты 8 прекращается. Так как заполнение блоков 7 производится с момента прихода импульса метки на роторе до прихода импульса тяжелого места, а частота генератора в 360 раз превышает скорость вращения ротора, то число импульсов, зафиксированное в блоках 7, соответствует утовому положению тяжелого места на роторе относительно метки на роторе в градусах.
Предмет изобретения
Установка для автоматического измерения неуравновешенности роторов на выбеге, содержащая механическую нодвижную систему и электронное измерительное устройство, в состав которого входят два блока измерения величины неуравновешенности, два блока из.мерения угла, генератор эталонной частоты, фотодиодный датчик опорного сигнала и блок управления циклом измерения, отличающаяся тем, что, с целью упрощения электрической схемы измерительного устройства, новышения надежности его работы и снижения требований по быстродействию к элементам электрической схемы блоков угла, блок управления циклом измерения снабжен коммутирующим устройством, обеспечивающим в режиме измерения скорости вращения ротора ноочередное, через оборот ротора, подключение входов блока измерения угла одновременно к выходу генератора эталонной частоты и к выходу фотодиодного датчика опорного сигнала, а в режиме измерения углового положения неуравновешенности - подключение одних входов каждого из блоков измерения угла к выходу генератора эталонной частоты, а других - к выходам блоков измерения величины неуравновешенности.
HIZDi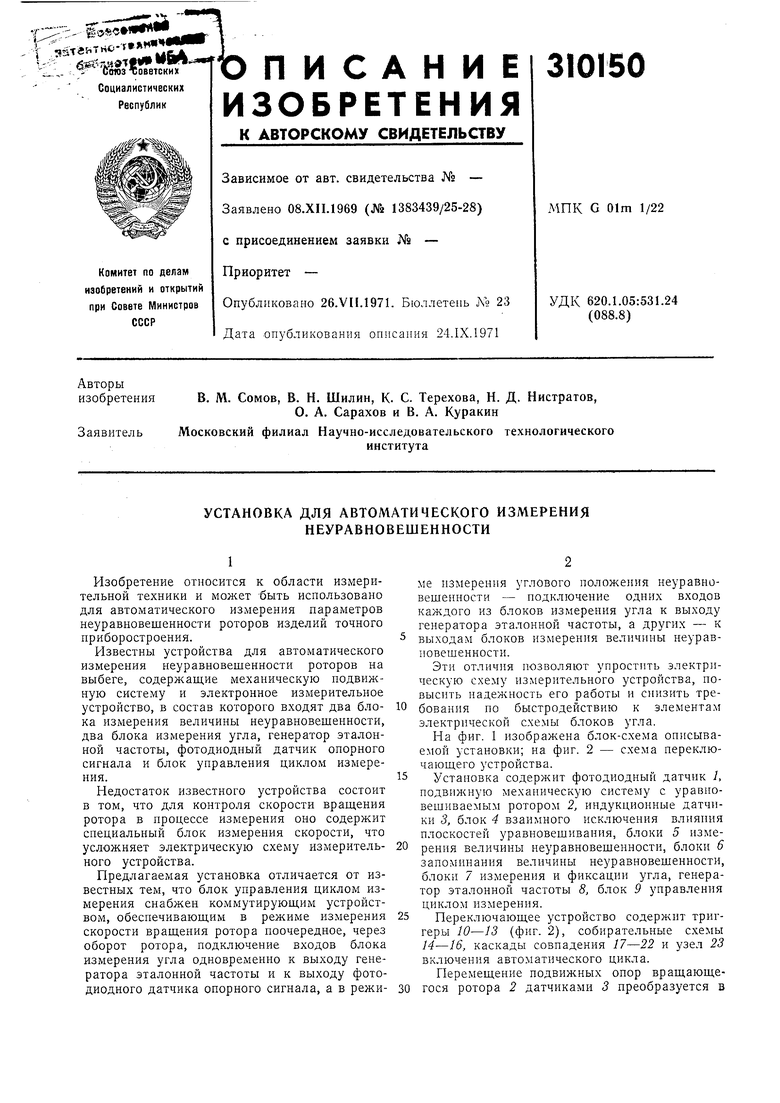
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИРОТОРОВ | 1968 |
|
SU221366A1 |
| ЭНДОВИБРАТОРНЫЙ УРОВНЕМЕР С ВРЕМЕННОЙ РАЗВЕРТКОЙ | 1965 |
|
SU168910A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2541072C2 |
| СИСТЕМА КОНТРОЛЯ РАБОТОСПОСОБНОСТИ АВИАДВИГАТЕЛЯ | 1966 |
|
SU189230A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208771C2 |
| ЦИФРОВОЙ ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО | 1971 |
|
SU297071A1 |
| АВТОМАТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ И РЕГИСТРИРУЮЩЕЕ | 1964 |
|
SU165597A1 |
| ПАТЕНШ-ТЕШ«1!ШЯ БИБЛИОТЕКА | 1973 |
|
SU395788A1 |
| БАЛАНСИРОВОЧНОЕ УСТРОЙСТВО | 1971 |
|
SU299756A1 |