:1
Известен способ управления полностью управляемым непосредственным преобразователем частоты путем лодключения выходной фазы к входной фазе, мгновенное значение напряжения которой наиболее близко к мгновенному значению задающего напряжения. Этот способ не обеспечивает синусоидальной формы выходного напряжения.
Основными отличительными особенностями предлагаемого способа является то, что, с целью улучшения формы .выходного напряжения, в каждый момент времени измеряют разность выходного и задающего напряжений, интегрируют ее и при получении положительного (отрицательного) интеграла заданной абсолютной величины вырабатывают сигнал на подключение выходной фазы к той входной фазе, разность напряжения которой и задающего напряжения наименее отрицательна (положительна).
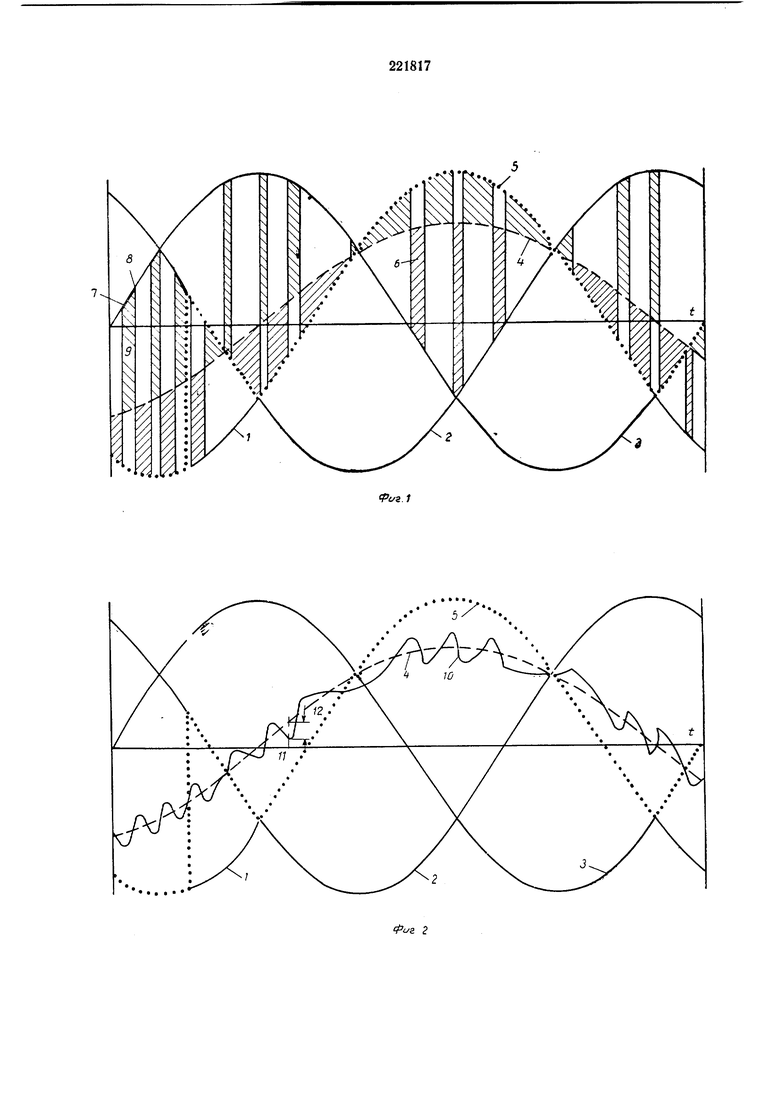
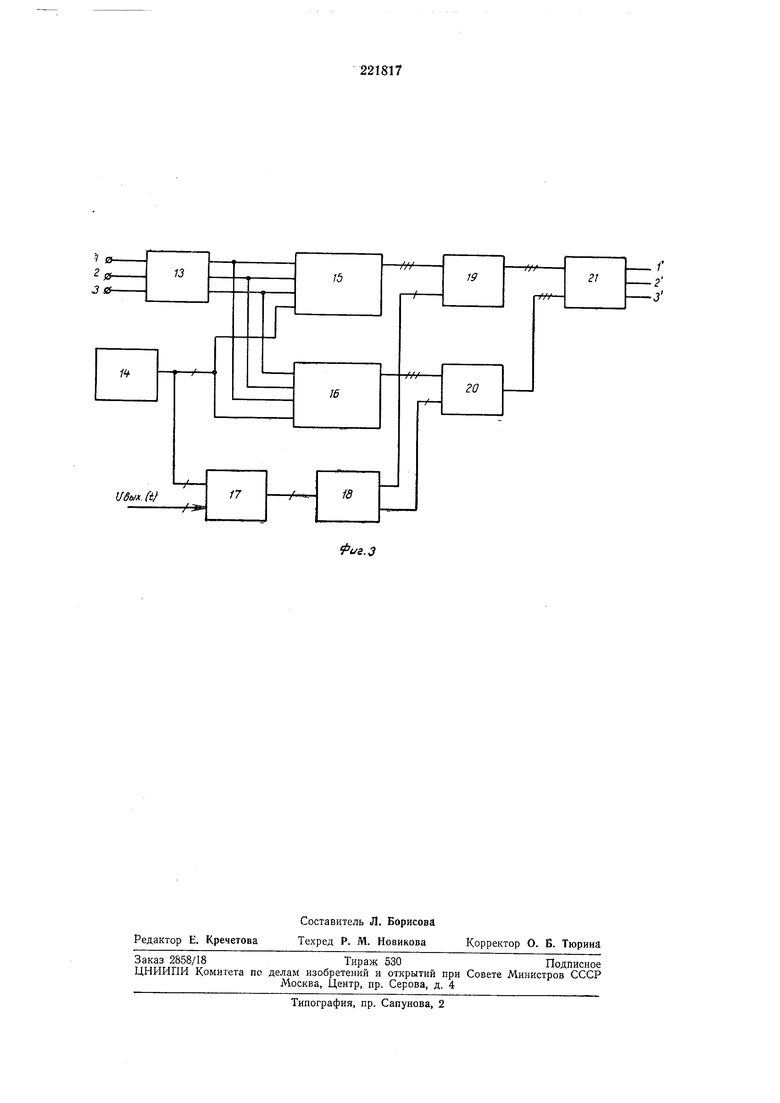
На фиг. 1 представлена кривая одной фазы выходного напряжения согласно онисываемому способу; на фиг. 2 - то же выходное напряжение при наличии фильтра или трансформатора и кривая тока; на фиг. 3 дана бло ксхема одного из возможных вариантов .выполнения системы управления согласно предложенному способу для одной выходной фазы преобразователя частоты.
ближением формы выходного напряжения к задающему, известный способ не устраняет значительно отклонение выходного от задающего напряжения неизменной полярности в течение некоторых промежутков времени, вследствие чего интегральное отклонение выходного и задающего напряжений
((01
ОДНОЙ полярности может достигать значительной величины и вызывать ухудшение формы выходного напряжения и тока. Однако и отдельных случаях применения допустимые средние отклонения выходного напрял ения или тока за промежуток времени кратных раз меньше периода выходного напряжения лимитированы.
Этим требованиям соогветствует предлагаемый способ управления переключением вентильных элементов преобразователя с ограниченным интегральным отклонением выходного и задающего напрянсений одной полярности.
Изменения интегрального отклонения выходного напряжения от задающего можно достичь путем изменения числа поочередного переключения выходной фазы к двум таким входным фазам, напряжение одной из которых больше величины задающего напряжения, а другой - меньше.
Сущность предлагаемого способа заключается в том, что выходная фаза попеременно подключается к двум входным фазам одной - мгновеннОб значение напряжения которой наиболее близко мгновенному значению .напряжения задающего генератора из всех входных фаз, мгновенные значения напряжения которых больше напряжения задающего генератора, и другой - напряжение которой наиболее близко напряжению задающего генератора из всех входных фаз, мгновенные значения напряжения которых меньше задающего напряжения.
Продолл ительность подключенного состояния каждой из этих двух входных фаз определяется интегральным отклонением выходного напряжения от напряжения задающего генератора. Если на выходе такого непосредственного преобразователя ил1еется трансформатор или фильтр, то интегральное отклонение выражается как отклонение напряжения после трансформатора или фильтра от напряжения задающего генератора.
Если непосредственный преобразователь подключен к нагрузке без промежуточного трансформатора или фильтра, интегральное отклонение должно быть выявлено как интеграл разности напряжений задающего генератора и действительного выходного напряжения преобразователя.
В примере, иллюстрированном фиг. 1, приняты следующие обозначения: 1, 2 к 3 - входные фазы преобразователя, 4 - кривая напряжения задающего генератора, 5 - кривая выходного напряжения преобразователя, полученная известным способом непосредственного приближения, 6 - отклонения кривой выходного напряжения преобразователя от кривой 5 при работе преобразователя согласно пред ложенному способу. Как видно из фиг. 1 кривая выходного напряжения, полученная предложенным способом, позволяет лучше приблизить выходное напряжение к заданному, чем кривая 5.
Например, в момент времени 7 интеграл разности задающего и действительного напряжения достигает определенной .величины, и совершается переключение выходной фазы от входной фазы 2 к входной фазе 3. После определенного промежутка времени 7-8 интеграл разности другой полярности также достигает такой л{е определенной величины, и совершается обратное переключение выходной фазы к фазе 1. Таким же образом осуществляется и дальнейщая работа преобразователя.
Интеграл разности, определяемый площадью 9 между подключенной входной фазой 3 к задающим напряжением 4 в промежутке времени 7-8, может быть выбран любой желаемой величины и в зависимости от этого иожег быть получено любое желаемое приближение действительного выходного напряжения преобразователя к задающему.
может быть включен трансформатор или фильтр, сглаживающий высщие гармонические составляющие действительного выходного напряжения. Пример такого случая преобразования показан на фиг. 2, где 10 - действительная кривая выходного напряжения, 11 - момент времени, когда отклонение задающего и выходного напряжения после фильтра достигает допустимого максимального отклонения, .и 12 - вышеупомянутое максимальное отклонение на.пряжения, которое может быть регулируемым.
Система управления, основанная на описываемом способе, содержит блок 13 трансформатора входных напряжений преобразователя, подаваемых в систему управления, блок 14 - задающего напрял ения данной выходной фазы преобразователя, блок 15 (соответственно 16) для выявления в каждый момент времени
входной фазы, разница налряжений которой с
задающим напряжением минимальная из всех
входных фаз, имеющих значения напряжений
больших (меньших) задающего.
В блоке 17 разница выходного вых () и задающего напряжений интегрируется и после до.стижения установленного значения интеграла выдает сигнал на переключение триггера 18 и возвращается в исходное состояние для повторения интегрирования разницы напряжений
другой полярности.
Сигналы от триггера 18 П0|3воляют получить на выходе блоков совпадения 19 и 20 полезные сигналы поиеременно, т. е. одновременно только в одном блоке 19 или 20 .и только в той
входной фазе, сигналы которой вырабатываются в блоках 16 .или 15.
Блок 21 системы управления является блоком «ИЛИ для собирания импульсов управления, соответствующих продолжительностям
подключения на выходе входных фаз.
Остальная часть системы управления не отличается от систем управления, обеспечивающих раздельную работу вентильных групп противоположных лрО|Водимостей .и подачу отпирающих и запирающих сигналов управления.
Предмет изобретения
Способ управления полностью управляемым непосредственным преобразователем частоты, путем подключения выходной фазы к входной фазе, мгновенное значение напряжения которой .наиболее близко к мгновенному значению задающего напряжения, отличающийся тем, что, с целью улучшения формы выходного напряжения, в каждый момент времени измеряют разность выходного и задающего напряжения, интегрируют ее и при получении положительного (отрицательного) интеграла заданной абсолютной величины вырабатьшают сигнал на подключение .выходной фазы к той входной фазе, разность напряжений которой .и задающего напрял ;ения наименее отрицательна (полол ительна).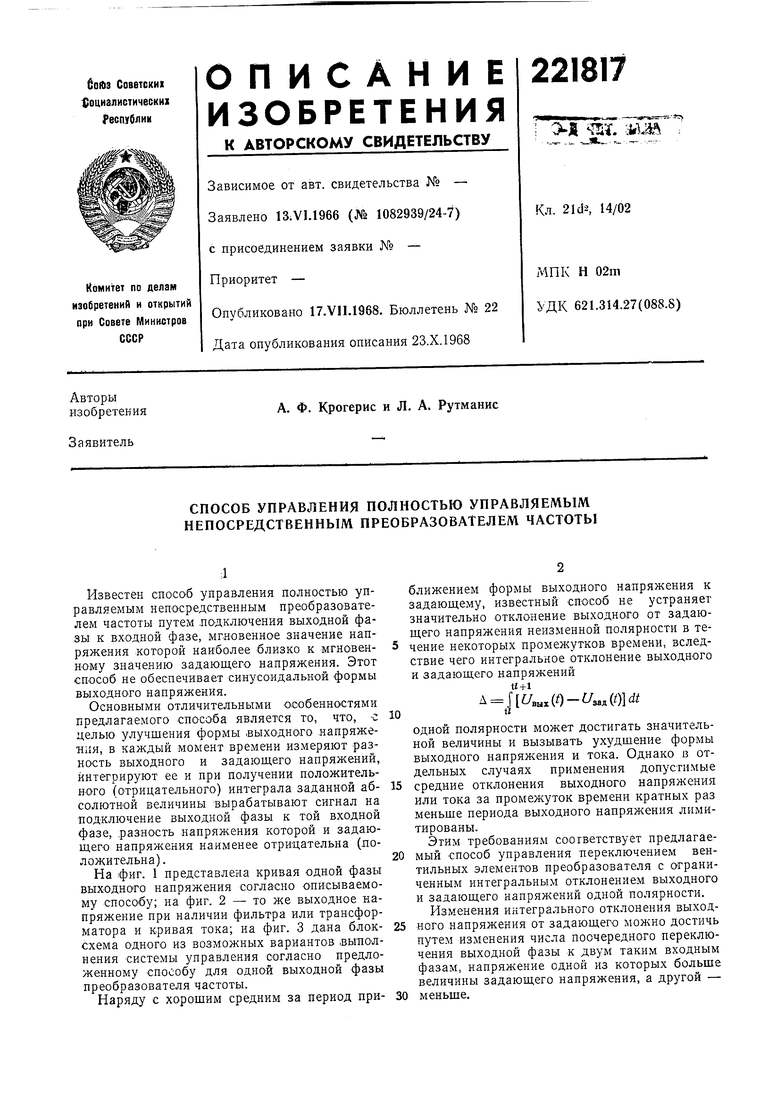
| название | год | авторы | номер документа |
|---|---|---|---|
| ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1971 |
|
SU293248A1 |
| Регулятор электрической мощности переменного тока(его варианты) | 1981 |
|
SU983690A1 |
| Способ управления преобразователем частоты | 1971 |
|
SU723751A1 |
| Способ управления преобразователем частоты | 1981 |
|
SU987783A1 |
| РАДИОПЕРЕДАЮЩАЯ СИСТЕМА ВРЕМЕННОЙ ОБЛАСТИ И РАДИОПЕРЕДАТЧИК | 1989 |
|
RU2105415C1 |
| Стабилизированная система электропитанияНА бАзЕ пьЕзОТРАНСфОРМАТОРА | 1979 |
|
SU851687A1 |
| СПОСОБ СЛЕДЯЩЕГО ДИСКРЕТНОГО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ | 1991 |
|
RU2025763C1 |
| Способ дискретного регулирования частоты | 1984 |
|
SU1246281A1 |
| РЕГУЛИРУЕМЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО ТОКА | 1973 |
|
SU381144A1 |
| Способ компенсации искажений токов в многофазных цепях с нелинейными нагрузками | 1988 |
|
SU1571722A1 |