В известных манипуляторах трубчатый корпус разделен немагнитной герметичной перегородкой на камеры, одна из которых снабжена задающим механизмом с ведущими магнитами, связанными с рукояткой и рычагом зажима, а другая - исполнительным механизмом с ведомыми магнитами, соединенными с толкателем и наконечником.
Такие манипуляторы закреплены в неподвижной опоре, а задающий и исполнительные механизмы их выполнены в виде многочисленных валиков, барабанов и тросов, посредством которых ведущие и ведомые магниты соответственно связаны с рукояткой, рычагом зажима, толкателем и наконечником. Это затрудняет управление манипуляторами и усложняет их конструкцию.
С целью устранения указанных недостатков, в предлагаемом манипуляторе камеры выполнены в виде коаксиально расположенных и подвижных по отношению друг к другу цилиндрических сосудов. Внутренний из них снабжен задающим механизмом с ведущими магнитами, выполненным в виде трубы и тяги с укрепленными на них магнитами, рукояткой и рычагом зажима, а внешний - исполнительным механизмом с ведомыми магнитами, связанными с толкателем наконечником, выполненным в виде магнитов, одни из которых укреплены на стенке внешнего сосуда, а другие связаны с подпружиненным толкателем и наконечником при помощи тяги и рычага. Кроме того, внутренний сосуд укреплен в подвижной опоре с уплотнением, например шаровой с сильфоном или мембраной.
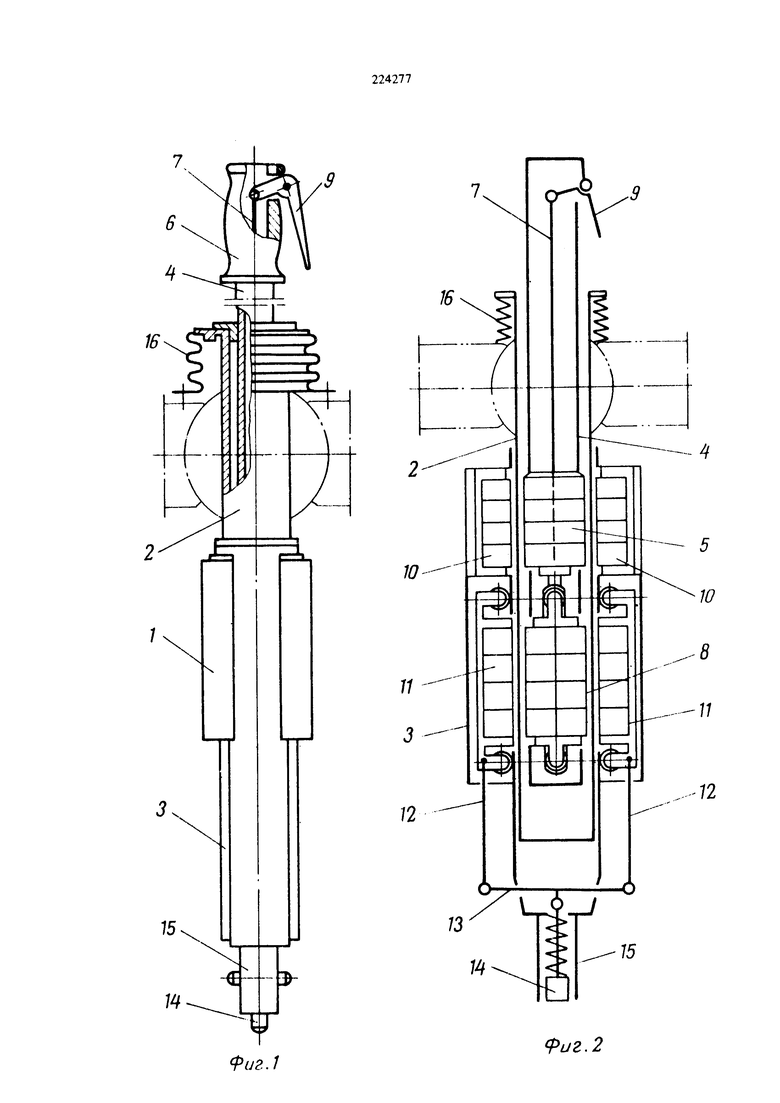
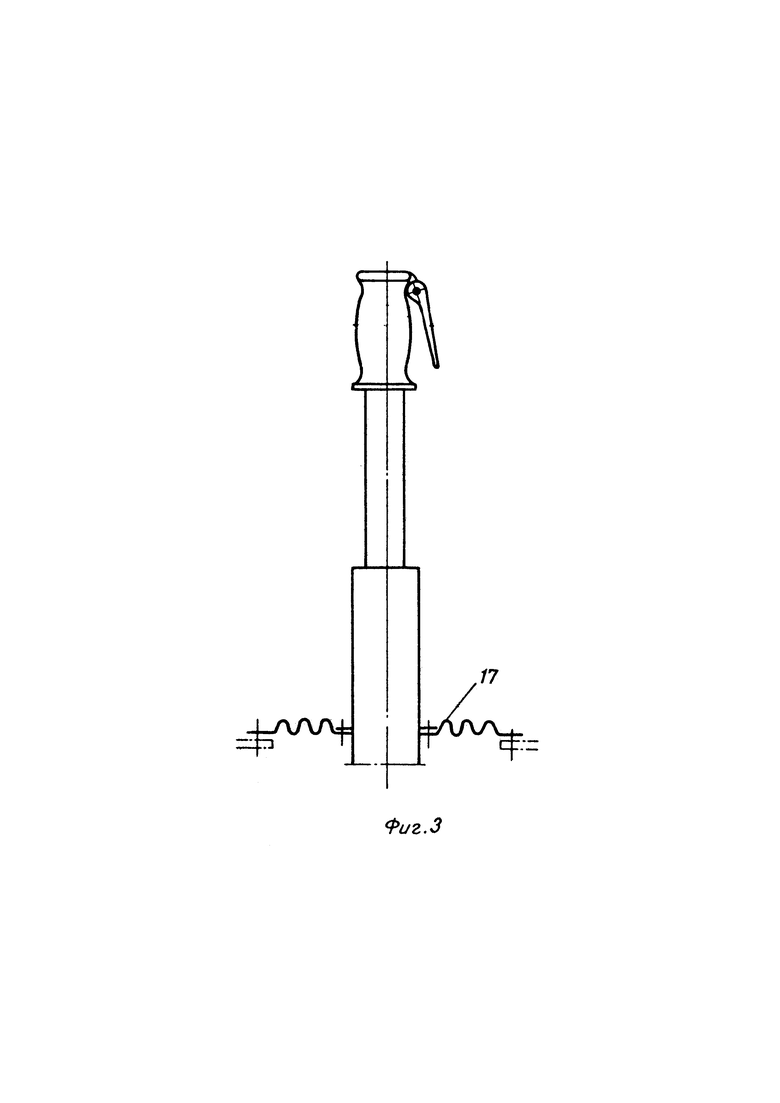
На фиг. 1 изображен предлагаемый манипулятор с установкой в шаровую опору, вид сбоку; на фиг. 2 дана кинематическая схема манипулятора; на фиг. 3 показана установка манипулятора в мембранную опору.
Трубчатый корпус 1 манипулятора, имеющий вертикальное рабочее положение, снабжен двумя камерами в виде коаксиально расположенных и подвижных по отношению друг к другу цилиндрических сосудов 2 и 3. Во внутренний сосуд 2 помещен задающий механизм - труба 4, на нижнем конце которой жестко укреплена кассета с постоянными магнитами 5, а на верхнем - рукоятка 6 для создания возвратно-поступательного и поворотного движения трубы. Внутри трубы 4 расположена тяга 7, на нижнем конце которой также укреплена кассета с магнитами 8, установленная ниже кассеты с магнитами 5, а на верхнем - рычаг зажима 9. При этом рычаг с зажимом находится на рукоятке 6. Во внешний сосуд 3 помещен исполнительный механизм - кассеты с постоянными магнитами 10, укрепленные на стенке сосуда в верхней части, ниже которых расположены постоянные магниты 11 в подвижных кассетах, соединенных при помощи тяги 12 и рычага 13 с подпружиненным толкателем 14 и наконечником 15. Кроме того, верхняя часть внутреннего сосуда 2 укреплена в подвижной опоре с уплотнением, например в шаровой 16 с сильфоном или мембраной 17. Таким образом, постоянные магниты 5 являются ведущими и находятся против ведомых постоянных магнитов 10. Постоянные магниты 8 также являются ведущими, против которых расположены ведомые магниты 11.
Для осуществления движений вперед-назад, вращения и качания необходимо, взявшись за рукоятку 6, сделать рукой соответствующие перемещения. Для движения зажима необходимо пальцами руки "прижать" к рукоятке 6 рычаг зажима 9, при этом передача движений происходит по цепи: рычаг зажима 9 - тяга 7 - ведущие магниты 8 - ведомые магниты 11 - тяга 12 - рычаг 13 - подпружиненный толкатель 14. Последний, в свою очередь, воздействует на рычаги известного сменного инструмента. При "опускании" рычага зажима 9 пружина толкателя 14 возвращает механизм зажима в исходное положение. Наклон манипулятора изменяют с помощью подвижной опоры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпаговый манипулятор | 2018 |
|
RU2691352C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691171C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2724735C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691170C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691349C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691172C1 |
| Устройство для размена монет | 1976 |
|
SU792275A1 |
| Шпаговый манипулятор | 2018 |
|
RU2698114C2 |
| ДИНАМИЧЕСКИЙ МАНИПУЛЯТОР | 2019 |
|
RU2723846C1 |
1. Манипулятор, содержащий трубчатый корпус, разделенный немагнитной герметичной перегородкой на камеры, одна из которых снабжена задающим механизмом с ведущими магнитами, связанными с рукояткой и рычагом зажима, а другая - исполнительным механизмом с ведомыми магнитами, связанными с толкателем и наконечником, отличающийся тем, что, с целью облегчения управления и упрощения конструкции, камеры выполнены в виде коаксиально расположенных и подвижных по отношению друг к другу цилиндрических сосудов, внутренний из которых снабжен задающим механизмом, состоящим из трубы с установленной внутри нее тягой, имеющими рукоятку и рычаг, а исполнительный механизм состоит из тяги с рычагом, соединенным с подпружиненным толкателем и наконечником.
2. Манипулятор по п. 1, отличающийся тем, что часть ведущих магнитов укреплена на трубе, а часть - на тяге.
3. Манипулятор по пп. 1 и 2, отличающийся тем, что часть ведомых магнитов укреплена на стенке внешнего сосуда, а часть - на тяге с рычагом.
