Известны натяжные станции, включающие датчики усилий, гидропривод с исполнительным элементом и устройство программного регулирования натяжения рабочего органа конвейера.
Предлагаемая натяжная станция отличается тем, что исполнительный элемент выполнен в виде гидравлических толкателей, фиксирующих положение натяжной головки конвейера при отсутствии сигнала рассогласования между заданным и фактическим натяжением. Магнитоупругие датчики усилий встроены в корпус подшипника приводного вала, имеющего гарантированный зазор относительно его наружной обоймы, и прижаты к ней посредством регулировочного болта через сферическую проставку.
Такое выполнение позволяет повысить надежность регулирования натяжения во всех режимах работы конвейера.
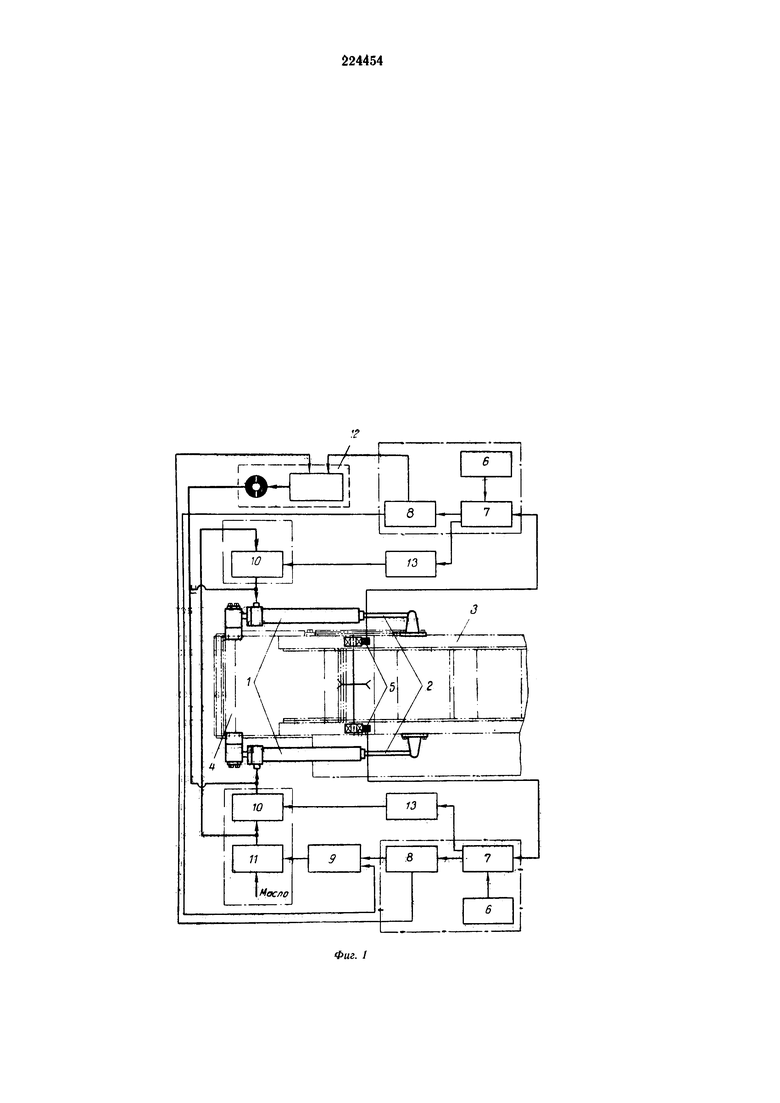
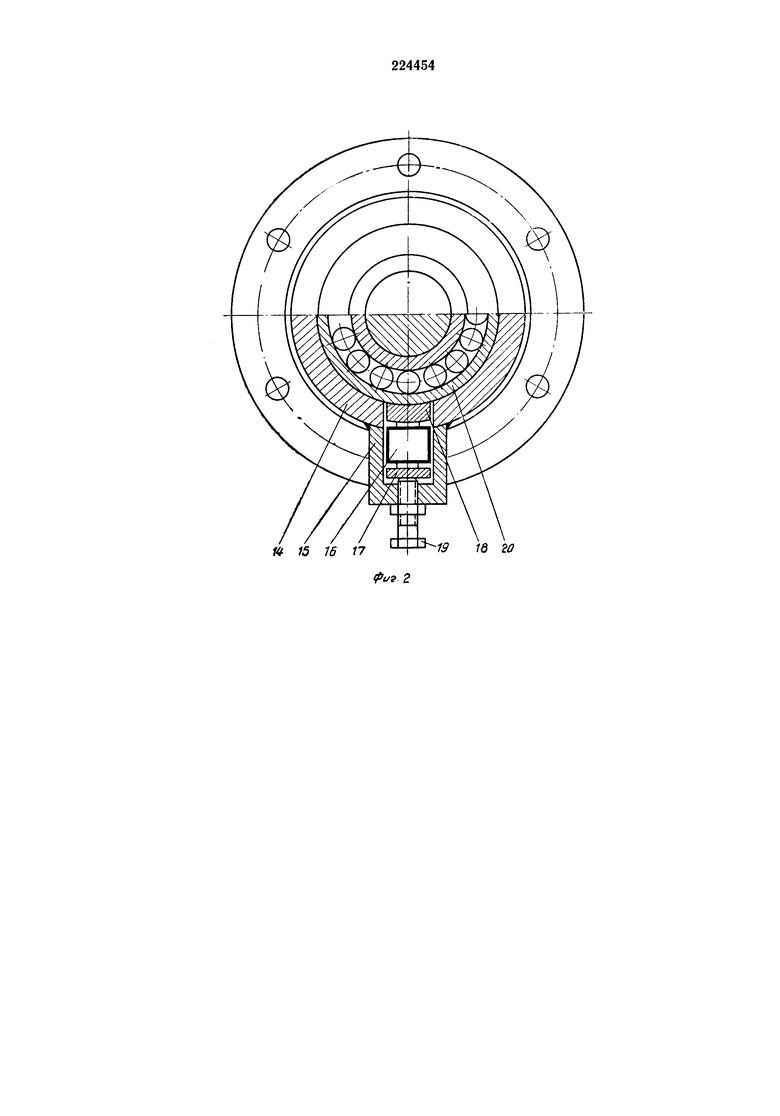
На фиг. 1 показана натяжная станция с системой автоматического регулирования натяжения тягового органа конвейера; на фиг. 2 - узел вала натяжной звездочки, а также общий вид встройки магнитоупругого датчика в корпус подшипника.
Исполнительный механизм натяжной станции включает два гидравлических толкателя 1, штоки 2 которых крепятся непосредственно к натяжной головке 3 пластинчатого конвейера. Рама 4 жестко связана с почвой выработки и служит для крепления исполнительного механизма натяжной станции и перемещения по ней натяжной головки конвейера на ходовых роликах.
Регулирование натяжения тягового органа конвейера производится по величине усилия, оказываемого валом приводной звездочки на магнитоупругие датчики 5, расположенные под каждой опорой вала.
Система автоматического регулирования содержит задающий элемент 6, элемент сравнения 7, усилительно-преобразовательный элемент 8, пуско-стоповую аппаратуру 9, регулирующий элемент 10, привод гидроблока 11, гидравлическое запорное устройство с сервоприводом 12 и усилитель 13.
К корпусу подшипника 14 приварена стальная коробка 15. В коробку помещается магнитоупругий датчик 16 и металлические проставки 17 и 18. При помощи регулировочного болта 19 через проставку 17 датчик прижимается к наружной обойме 20 шарикоподшипника через сферическую проставку 18. Корпус подшипника имеет специальную расточку, обеспечивающую гарантированный зазор между наружной обоймой шарикоподшипника и его корпусом.
При натяжении цепи через наружную обойму подшипника и сферическую приставку 18 датчику передается усилие, пропорционально которому с его выхода снимается напряжение. Результирующий сигнал контура регулирования (ошибка рассогласования) поступает в цепь управления магнитного усилителя 13.
Нагрузкой магнитного усилителя является катушка электромеханического преобразователя электрогидравлического золотника, преобразующего величину тока в пропорциональный расход масла и управляющего перемещением штока соответствующего гидравлического толкателя в сторону уменьшения сигнала рассогласования между заданным и фактическим натяжением тягового органа.
Независимое регулирование усилий на каждом конце вала приводной звездочки при одинаковом значении задающего сигнала позволяет обеспечить одинаковые их величины, исключая тем самым возможность перекоса вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ | 1965 |
|
SU176001A1 |
| Способ автоматического управления натяжением тягового органа двухприводного скребкового конвейера | 2022 |
|
RU2801914C1 |
| Натяжное устройство скребкового конвейера | 1982 |
|
SU1025611A1 |
| КОНВЕЙЕРНАЯ СИСТЕМА ДЛЯ НАКОПЛЕНИЯ ТРАНСПОРТИРОВКИ ЗАКРЕПЛЕННОГО НА ТРОЛЛЕЯХ ШТУЧНОГО ГРУЗА | 1969 |
|
SU241990A1 |
| Углевыемочная машина | 1979 |
|
SU859631A1 |
| НАТЯЖНОЕ УСТРОЙСТВО СКРЕБКОВОГО КОНВЕЙЕРА ПОГРУЗОЧНОЙ МАШИНЫ | 1992 |
|
RU2057695C1 |
| Цепной элеватор-накопитель | 1973 |
|
SU605758A1 |
| ПРИВОДНАЯ СТАНЦИЯ СКРЕБКОВОГО КОНВЕЙЕРА | 1994 |
|
RU2081041C1 |
| Натяжная головка поворотного двухцепного скребкового конвейера | 1983 |
|
SU1146250A1 |
| Ленточно-цепной конвейер | 1983 |
|
SU1102722A1 |
Автоматическая натяжная станция, включающая магнитоупругие датчики усилий, гидропривод с исполнительным элементом и устройство программного регулирования натяжения рабочего органа конвейера, отличающаяся тем, что, с целью повышения надежности регулирования натяжения во всех режимах работы конвейера, исполнительный элемент выполнен в виде гидравлических толкателей, фиксирующих положение натяжной головки конвейера при отсутствии сигнала рассогласования между заданным и фактическим натяжением, а магнитоупругие датчики усилий встроены в корпус подшипника приводного вала, имеющего гарантированный зазор относительно его наружной обоймы, и прижаты к ней посредством регулировочного болта через сферическую проставку.
