Известны устройства для измерения кинематических ошибок механических передач, в которых применяются измерительные головки и совмещенные отсчетные шкалы.
Предложенное устройство отличается от известных тем, что для повышения точности измерения в реальных условиях эксплуатации механических передач, в нем установлены электронный преобразователь и связанные соответственно со входным и выходным валами испытуемой системы входной фотоэлектрический и выходной импульсные оптические датчики. Входной датчик через электронный преобразователь подключен к осветительной системе выходного датчика, подсоединенного к к регистрирующему узлу.
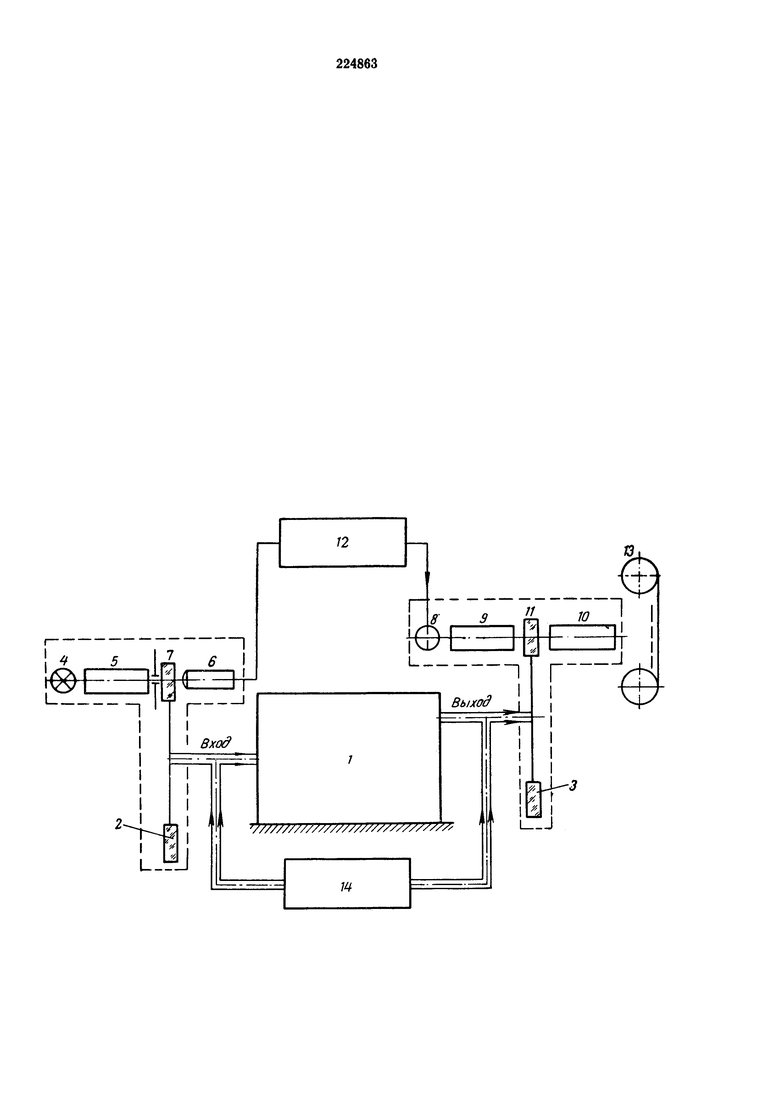
На чертеже представлена структурная схема устройства.
Предлагаемое устройство основано на использовании программных импульсных датчиков, связанных с входом и выходом проверяемой системы, и фиксации с помощью этих датчиков мгновенных положений системы в соответствии с заданной программой; благодаря мгновенной фиксации выявляются мгновенные значения величин рассогласования между входом и выходом проверяемой системы, которые и представляют контролируемые ошибки системы.
С входом и выходом проверяемой системы 1 соединены оптические программные штриховые лимбы 2 и 3; эти лимбы имеют на темном фоне прозрачные штрихи, расположенные в соответствии с заданной программой измерений. Лимб 2 совместно с источником света 4, осветителем 5, несущим неподвижную щель, и фотоэлементом 6 составляют входной оптический импульсный фотоэлектрический датчик 7. Лимб 3 совместно с импульсной осветительной системой 8, осветителем 9 и оптической проекционной системой 10 составляют выходной оптический импульсный датчик 11. Электронное устройство 12 преобразует и усиливает импульсы, поступающие от входного импульсного датчика, и управляет работой выходного импульсного датчика таким образом, чтобы вспышка импульсного источника света происходила в момент образования импульса на фотоэлементе.
Лентопротяжный механизм с фотопленкой образуют оптическое регистрирующее устройство 13 (для визуального контроля вместо пленки может быть использован экран). Для задания проверяемой системе необходимого режима испытания служит режимный контур 14, включающий электродвигатель, редуктор и нагрузочное устройство.
Процесс выявления и регистрации кинематических ошибок с помощью перечисленных элементов протекает следующим образом.
При движении проверяемой системы вращающийся программный лимб 2 модулирует по заданному закону световой поток, идущий от осветителя 5. Импульсы фототока, усиленные и преобразованные электронным устройством 12, поджигают импульсный источник света, который через осветитель 9 освещает кратковременными вспышками выходной лимб 3. В результате фиксируется мгновенное положение последнего, соответствующее заданному программой положению входного лимба в момент образования импульса фототока. Это мгновенное положение выходного лимба проектируется далее на фотопленку (или на экран) регистрирующего устройства 13 в виде точек или коротких штрихов, представляющих изображения прозрачных штрихов выходного лимба 3.
При отсутствии в проверяемой системе кинематических ошибок все эти точки расположились бы на пленке вдоль прямой линии, при наличии же ошибок - точки располагагаются по кривой, ординаты которой, отсчитанные от нулевой линии, представляют мгновенные значения величин рассогласования входного и выходного лимбов, т.е. непосредственно контролируемые кинематические ошибки проверяемой системы.
Процесс регистрации кинематических ошибок проверяемых систем определяется всецело программой нанесения прозрачных штрихов на лимбах 2 и 3. Выбор программы обусловлен законом движения системы (линейным или нелинейным), а также передаточным отношением системы. При линейном законе движения системы программа представляет собой ряд линейно расположенных прозрачных штрихов. Фиксировать начальное положение лимба не нужно, благодаря чему такая программа является универсальной для всех линейных систем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля лимбов | 1975 |
|
SU591687A1 |
| УСТРОЙСТВО для КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ЗУБЧАТЫХ ПЕРЕДАЧ | 1971 |
|
SU305344A1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЧНОСТИ ИЗГОТОВЛЕНИЯ УГЛОИЗМЕРИТЕЛЬНЫХ СТРУКТУР, НАНОСИМЫХ НА ПРОЗРАЧНЫЙ НОСИТЕЛЬ | 2003 |
|
RU2242715C1 |
| Фотоэлектрический преобразователь положения в код | 1981 |
|
SU1040503A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ВРАЩЕНИЯ ПЛОСКОСТИ ПОЛЯРИЗАЦИИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ И ФОТОЭЛЕКТРИЧЕСКИЙ ПОЛЯРИМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2088896C1 |
| Устройство для измерения неравномерности скорости вращения | 1981 |
|
SU972408A2 |
| Фотоэлектрический преобразователь угловых перемещений | 1977 |
|
SU696280A1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ОТСЧЕТНОГО КРУГА УГЛОМЕРНОГО ИНСТРУМЕНТА | 1992 |
|
RU2082087C1 |
| Способ измерения распределения освещенности дорожного покрытия и автоматизированный комплекс для его реализации | 2021 |
|
RU2774503C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2024 |
|
RU2829832C1 |
Устройство для программного измерения кинематических ошибок механических передач, содержащее регистрирующий узел, отличающееся тем, что, с целью повышения точности измерения в реальных условиях эксплуатации механических передач, в нем установлены электронный преобразователь и связанные соответственно со входным и выходным валами испытуемой системы входной фотоэлектрический и выходной импульсные оптические датчики, причем входной датчик через электронный преобразователь подключен к осветительной системе выходного датчика, подсоединенного к регистрирующему узлу.
