Изобретения относятся к области строительства и эксплуатации улично-дорожных сетей, а также к средствам и способам комплексной диагностики эксплуатационных показателей объектов дорожного хозяйства и организации мониторинга за их технико-эксплуатационным состоянием в режиме реального времени. Способ измерения распределения освещенности дорожного покрытия и автоматизированный комплекс для его реализации предназначены для световых измерений освещенности и могут быть использованы при измерении параметров освещения автомобильных дорог и улиц в режиме реального времени, создаваемого различными источниками искусственного освещения.
Правильное освещение магистралей и дорог – очень важная задача для любого населенного пункта. Даже незначительные нарушения могут привести к резкому увеличению числа чрезвычайных происшествий, в которых могут пострадать как автомобилисты, так и пешеходы. Именно поэтому освещение автодорог производится в соответствии с ГОСТ, СП и СНиП.
В настоящее время параметры освещения дорог регламентируются достаточно широким набором документов, среди которых ГОСТы, СП (Своды правил) и ОДМ (Отраслевые дорожные методики). Среди наиболее важных документов выделяются:
- ГОСТ Р 55706-2013 «Освещение наружное утилитарное. Классификация и нормы», регламентирует количественные и качественные параметры освещения;
- ГОСТ Р 55707–2013 «Освещение наружное утилитарное. Методы измерений нормируемых параметров», регламентирует методы измерения нормируемых параметров;
- СП 52.13330.2016 «Естественное и искусственное освещение. Актуализированная редакция СНиП 23-05-95».
К числу нормируемых количественных и качественных параметров освещения автодорог вышеуказанные документы относят:
- среднюю освещенность на дорожном покрытии;
- равномерность освещенности;
- уровень слепящего действия;
- коэффициент периферийного освещения SR.
Для измерения освещенности дорожного покрытия используются поверенные либо калиброванные люксметры с предельно допускаемой основной относительной погрешностью измерений не более 10 %, диапазоном измерения освещенности от 1 до 100 лк (не менее). Для контроля нормируемых количественных и качественных параметров освещения выбирается контрольный участок, на котором оператор вручную с помощью люксметра производит измерения освещенности дорожного покрытия в контрольных точках, количество которых на контрольном участке зависит от расстояния между осветительными опорами, количества полос движения и их ширины и может достигать 100 и более точек только на одном контрольном участке. После проведения измерений определяется средняя освещенность как среднее арифметическое значение по всем измеренным контрольным точкам, а для контроля равномерности освещенности требуется определить минимальную освещенность.
Таким образом, измерение и контроль параметров освещения автомобильных дорог ручным способом является кропотливой и достаточно трудоемкой работой, требующей к тому же перекрытия движения на один и более часов, что бывает весьма затруднительно в условиях современного мегаполиса. Единственным выходом в данной ситуации являются мобильные методы измерений и установки для их реализации. Для их осуществления требуется решение ряда проблем, связанных с ограничениями методов и средств измерений. Кроме того, непрерывная запись данных, которая является особенностью мобильного метода измерений, связана с требованиями к скорости движения транспортного средства и фиксации мест измерения. Известны патенты, направленные на решение данной задачи.
Известен способ осуществления мониторинга улично-дорожной сети посредством передвижной дорожной лаборатории. Согласно этому способу осуществляют контроль технико-эксплуатационных параметров дорожного объекта посредством перемещения вдоль дорожного полотна контрольно-измерительной системы со средством координатной привязки результатов измерений контролируемых параметров и с функциональным комплексом на основе по меньшей мере одной оптоэлектронной компоненты. Для этого упомянутую систему стационарно устанавливают на базовом транспортном средстве с использованием виброизолированной основы для монтажа по меньшей мере части функциональных средств контрольно-измерительной системы и коммутационно организуют выходные каналы ее подсистем с бортовым вычислительным комплексом, функционально являющимся средством обработки регистрируемой информации и передачи результатов на центральную ЭВМ в цифровой форме в режиме реального времени (патент РФ № 2170298 С2, 2001 г.).
Известно изобретение «Способ осуществления мониторинга улично-дорожной сети посредством передвижной дорожной лаборатории и функциональный комплекс для его осуществления» (патент РФ № 2373325, МПК: E01C 23/07, G01B 5/28, G01C 7/04; опубл. 20.11.2009). Согласно данному способу осуществляют контроль параметров дорожного объекта посредством перемещения вдоль дорожного полотна контрольно-измерительной системы со средством координатной привязки результатов измерений и с функциональным комплексом на основе по меньшей мере одной оптоэлектронной компоненты. Упомянутую систему устанавливают на транспортном средстве (ТС) с использованием виброизолированной основы и коммутационно организуют выходные каналы ее подсистем с бортовым вычислительным комплексом. В качестве виброизолированной основы используют установленную над ТС1 раму с оптической станиной (ОС). Контрольно-измерительную систему формируют многопрофильной, для чего в составе функционального комплекса по меньшей мере используют подсистему замера поперечной ровности поверхности покрытия дорожной одежды, посредством которой осуществляют трехмерное построение микропрофиля упомянутой поверхности в поперечном направлении, для чего данную подсистему организуют на основе трехмерной камеры объемного сканирования и лазерного генератора линии объемного сканирования, которую формируют поперек дорожного полотна, при этом камеру и лазерный генератор пространственно организуют на ОС; подсистему замера продольной ровности поверхности покрытия дорожной одежды, посредством которой осуществляют построение микропрофиля упомянутой поверхности в продольном направлении, для чего данную подсистему организуют на основе трехмерной камеры объемного сканирования и двух датчиков ускорения ОС, которые пространственно организуют на ОС в области камеры. Сканирование исследуемого объекта в области лазерной линии осуществляют посредством общей для обеих подсистем камеры сканирования. Данная система является многопрофильной, фиксирует разные параметры дорожного покрытия, отличается сложностью, а вследствие этого низкой надежностью и точностью измерений.
Известна заявка на изобретение № CN105628194A «Road lighting quality field measurement method» / «Метод измерения качества дорожного освещения» (МПК: G01J1/00; опубл. 01.06.2016). Заявка раскрывает способ измерения качества дорожного освещения между двумя опорами уличного освещения, одна из которых помечается специальным маркером. Датчик освещенности располагается в нижней передней части автомобиля и позволяет непрерывно измерять освещенность между двумя опорами при движении автомобиля, причем остановка измерений осуществляется автоматически при достижении автомобилем с датчиком освещенности опоры, помеченной специальным маркером.
Недостатками данного способа и устройства измерения являются:
- измерение освещенности, создаваемой осветительными приборами только от опор, расположенных впереди автомобиля. Совершенно не учитывается освещенность от осветительных приборов, расположенных на опорах освещения позади автомобиля, так как в принятой схеме измерения автомобиль экранирует освещение от этих опор, что может привести к значительной погрешности измерений;
- требуется предварительно помечать опоры освещения специальными маркерами, что снижает заявленную в патенте скорость быстрого измерения качества дорожного освещения во время движения.
Наиболее близкой к заявляемому техническому решению является заявка на изобретение № CN102213613A «Vehicular road illumination detection system» / «Система определения дорожного освещения» (МПК: B60R11/06, G01J1/00, G01M11/02; опубл. 12.10.2011). Предложена система, устанавливаемая на транспортном средстве для обнаружения и оценки качества работы системы уличного освещения. Система включает автомобиль для выявления дорожного освещения, который состоит из цифрового измерителя освещенности, цифровой камеры и поддерживающей ее поворотно-наклонной камеры, спутниковой системы позиционирования, компьютера и принтера, установленных в автомобиле. Автомобиль движется по дороге со средней скоростью, и компьютер может получать всю информацию об освещении, получаемую цифровым измерителем освещенности и цифровой камерой по пути, обрабатывать, анализировать и отображать данные в реальном времени. Результат можно распечатать на принтере. В то же время спутниковый локатор вычисляет точное положение автомобиля в режиме реального времени и направляет водителя для движения и обнаружения в соответствии с откалиброванным маршрутом электронной карты.
Недостатком данного способа и устройства измерения является то, что цифровой измеритель освещенности устанавливается на крыше автомобиля, то есть находится на достаточно большом расстоянии от дорожного полотна. Таким образом, измеряется освещенность не на дорожном покрытии, а на достаточно большом расстоянии от него. Использование такого метода измерений не обеспечивает объективности и точности получаемых данных. Кроме того, использование спутникового локатора делает невозможным определение точного местоположения автомобиля при отсутствии или затрудненном приеме спутникового сигнала (автодорожные туннели, плотная городская застройка, горная или лесистая местность).
Используемые понятия
Виброизоляция (вибродемпфер, вибропоглотитель, «вибра») – категория материалов, применяемых для вибродемпфирования. Основное назначение – снизить амплитуду колебаний металлических (пластиковых или иных) панелей. Несмотря на разнообразие существующих виброматериалов, в их основе лежит единый принцип состава – это вязкоупругий материал (обычно на основе битума, вспененного каучука и т.п.), в котором происходят значительные механические потери, обусловленные внутренним трением.
Диапазонный усилитель – усилитель сигналов определенного диапазона частот (Приложение 1 ГОСТ 28324 89 Сети распределительные приемных систем телевидения и радиовещания).
Значение слова «не менее» – нареч., употребляется при указании на нижний временной или количественный предел; как минимум, не меньше.
Комплекс – система, совокупность чего-либо, объединённого вместе, имеющего общее предназначение и отвечающего какой-либо определённой общей цели.
Освещенность на дорожном покрытии Еh, лк – освещенность, создаваемая осветительной установкой в заданной точке на дорожном покрытии.
Позиционирование – определение местоположение и отслеживания перемещения объектов.
Преобразователь AD/DA – англ. analog-digital / digital-analog converter, или на русском языке: аналого-цифровой / цифро-аналоговый преобразователь. Как правило, аналого-цифровой преобразователь – это электронное устройство, которое преобразует входное аналоговое напряжение в цифровое число.
Равномерность освещенности Uh – отношение минимального значения освещенности на дорожном покрытии к её среднему значению.
Cредняя освещенность на дорожном покрытии
 лк – освещенность на дорожном покрытии, усредненная по заданному участку дороги.
лк – освещенность на дорожном покрытии, усредненная по заданному участку дороги.
Система (SYSTEM) – организация из взаимосвязанных элементов, находящихся в динамическом взаимодействии друг с другом.
Термостабилизированный – термостабильный, сохраняющий установленную температуру.
Триггеры – это устройства с двумя состояниями. Они предназначены для запоминания двоичной информации. Использование триггеров позволяет реализовывать устройства оперативной памяти (т.е. памяти, информация в которой хранится только на время вычислений). Однако это не единственная их область применения. Триггеры широко используются для построения цифровых устройств с памятью, таких как счётчики, преобразователи последовательного кода в параллельный, последовательные порты или цифровые линии задержки, применяемые в составе цифровых фильтров.
Усилитель фототока – устройство, увеличивающее выходной сигнал. Из оптических измерительных приборов получили распространение в автоматике в первую очередь фотоэлектрические. Принцип их действия основан на фотоэлектрическом эффекте освещаемого фотоэлемента, который дает в зависимости от своей освещенности фототок разной силы. Освещенность же связывается с измеряемым размером. Через усилитель фототок действует на механизм исполнительного органа: отсчетного, сортирующего, сигнализирующего или обрабатывающего.
Фотóметр – прибор для измерения одной или нескольких фотометрических величин. Примеры фотометров: фотометрический шар, люксметр, яркомер.
Фотоголовка (также фотодатчик) – элемент фотометра для приема видимого излучения (света) и преобразования его в электрический сигнал. В качестве приемника света в настоящее время используется фотоэлектрический полупроводниковый приемник излучения, обычно снабженный корректирующим под кривую видности человеческого глаза светофильтром. Примеры фотоголовки: датчик измерителя освещенности, пульсаций, яркомера.
Фотоприемное устройство – ФПУ – фоточувствительный полупроводниковый прибор, состоящий из фотоэлектрического полупроводникового приемника излучения и схемы предварительного усиления фотосигнала в гибридном или интегральном исполнении, объединенных в единую конструкцию.
Фотометрическая величина – аддитивная физическая величина, определяющая временнóе, пространственное, спектральное распределение энергии оптического излучения и свойств веществ, сред и тел как посредников переноса или приемников энергии (определение из ГОСТ 26148–84, 8.654-2016). Иными словами, фотометрические величины описывают свойства света или сред, связанных с его передачей. Используются в фотометрии, оптике и других отраслях науки и техники.
Частота дискретизации (или частота семплирования, англ. sample rate) – частота взятия отсчётов непрерывного по времени сигнала при его дискретизации (в частности, аналого-цифровым преобразователем). Измеряется в герцах.
Ethernet коммутатор (он же Ethernet Switch или просто «свитч», сетевой коммутатор) – это отдельный узел, служащий для объединения нескольких устройств в локальную сеть. Сетевой коммутатор или свитч (жарг. от англ. switch — переключатель) – устройство, предназначенное для соединения нескольких узлов компьютерной сети в пределах одного сегмента. В отличие от концентратора, который распространяет трафик от одного подключенного устройства ко всем остальным, коммутатор передает данные только непосредственно получателю. Это повышает производительность и безопасность сети, избавляя остальные сегменты сети от необходимости (и возможности) обрабатывать данные, которые им не предназначались.
Целью изобретения является повышение скорости, качества и достоверности измерений параметров освещения дорожного покрытия путем:
– исключения необходимости перекрытия движения на время проведения измерений;
– повышения точности позиционирования фотоприемных устройств, установленных на передвижном средстве;
– повышения точности измерения освещенности на дорожном покрытии;
– обеспечения непрерывности измерений и их записи без пропусков и потерь информации;
– обеспечения возможности проведения измерения в туннелях и других местах при отсутствии спутниковой связи и системы позиционирования GPS/Glonas.
Для достижения поставленной цели способ измерения распределения освещенности дорожного покрытия автодороги включает измерение показаний освещенности дороги не менее чем одной парой разнесенных в пространстве фотоголовок, размещаемых на передвижном средстве, при этом одну из фотоголовок устройств размещают впереди в нижней части передвижного средства, другую фотоголовку размещают позади в нижней части передвижного средства, формируемые фотоголовкой сигналы усиливают программируемым многодиапазонным усилителем фототока, усиленный сигнал оцифровывают аналого-цифровым преобразователем, оцифрованные сигналы передают и записывают в запоминающее устройство многоканального фотометра в виде значений освещенности, при этом значение освещенности в конкретной точке дороги определяют суммированием показаний, измеренных каждой парой фотоголовок в одной и той же точке на дороге, а координаты конкретной точки определяют с помощью устройства измерения скорости и пройденного расстояния. Способ характеризуется также тем, что точку начала отсчета и координаты точек измерения освещенности определяют с помощью устройства измерения скорости и пройденного расстояния. Способ характеризуется также тем, что координаты конкретной точки определяют с помощью оптического устройства измерения скорости и пройденного расстояния. Способ характеризуется также тем, что для указания места измерений на карте используют систему Глонасс /GPS.
Для реализации указанного способа автоматизированный комплекс для измерения распределения освещенности на дорожном покрытии размещают на передвижном средстве. Автоматизированный комплекс содержит не менее пары разнесенных в пространстве фотоголовок, оптический датчик измерения скорости и расстояния, усилители фототока, устройство обработки данных, преобразователь напряжения, при этом фотоголовки соединены с многоканальным фотометром посредством кабеля передачи данных через многодиапазонные усилители фототока, расположенные в корпусе многоканального фотометра. Устройство измерения расстояния и скорости связано с многоканальным фотометром и устройством управления и обработки данных. Кроме того, фотоголовки жестко закреплены на вибростойком основании, включающем блок термостабилизации, а усилители фототока выполнены двенадцатидиапазонными. Устройство измерения расстояния и скорости связано с многоканальным фотометром экранированным коаксиальным кабелем. Устройство измерения расстояния и скорости связано с устройством управления и обработки данных (персональным компьютером) посредством кабеля Ethernet. Для связи между элементами конструкции используют сетевой коммутатор.
Конструкция автоматизированного комплекса иллюстрируется фигурами графического изображения.
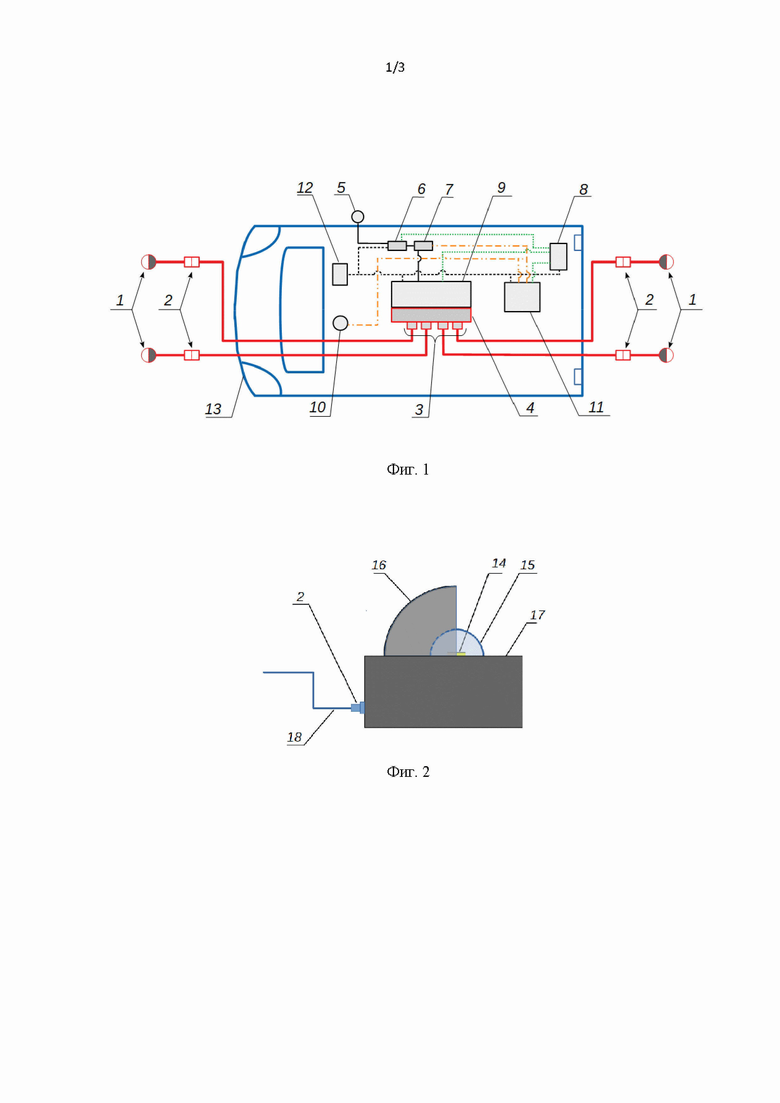
Фиг. 1 – схема автоматизированного комплекса измерения распределения освещенности дорожного покрытия на автодорогах.
Фиг. 2 – фотоголовка (фотоприемное устройство (ФУ)).
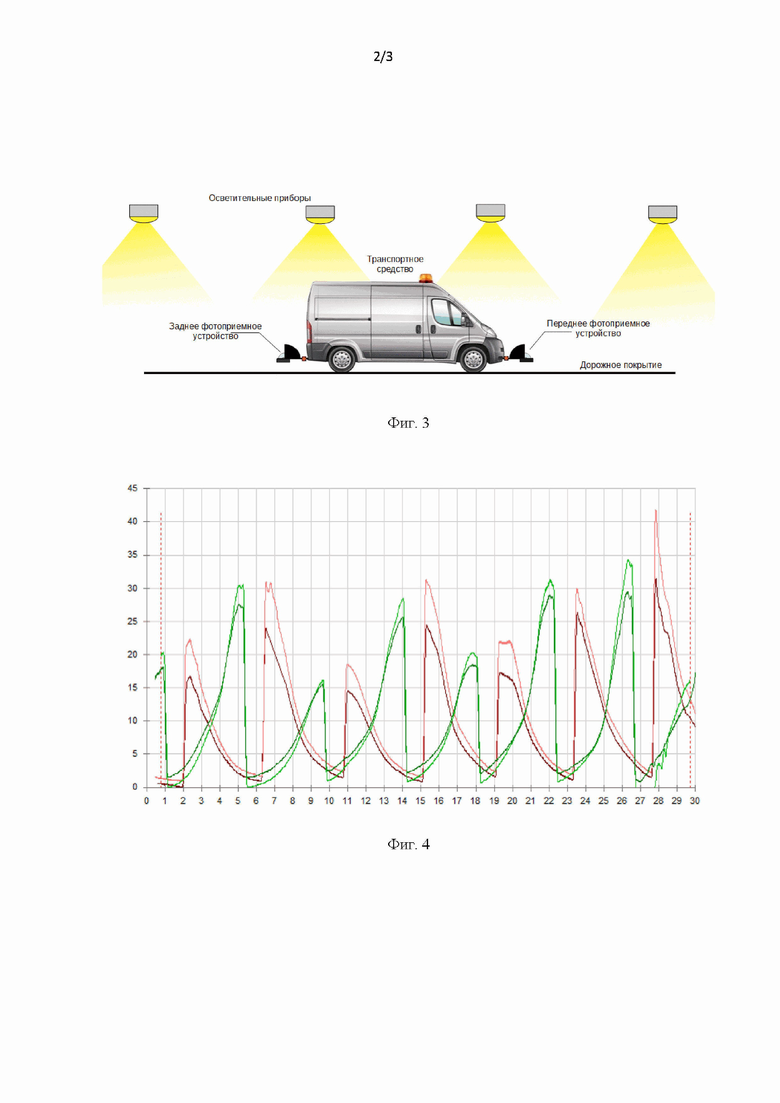
Фиг. 3 – пример реализации измерения автоматизированным комплексом измерения распределения освещенности дорожного покрытия.
Фиг. 4 – отображение результатов измерений в виде четырех графиков результатов измерений, полученных от четырех фотоприемных устройств.
Фиг. 5 – график распределения освещенности дорожного покрытия, полученный в результате обработки (сведения) данных от двух пар ФУ.
Фиг. 6 – блок-схема автоматизированного комплекса.
Где:
1 – фотоголовки;
2 – герметичные разъемы;
3 – усилители фототока;
4 – аналого-цифровой преобразователь;
5 – оптический датчик измерения скорости и расстояния (ОД);
6 – блок обработки сигнала;
7 – блок согласования сигнала триггера;
8 – коммутатор;
9 – многоканальный фотометр;
10 – GPS/Глонасс–приемник;
11 – устройство управления и обработки данных (РС);
12 – преобразователь напряжения 12/230 В (инвертор);
13 – транспортное средство;
14 – приемная поверхность фотоголовки;
15 – прозрачный защитный колпак;
16 – непрозрачный экран;
17 – основание;
18 – кабель передачи данных.
На фиг. 1 соответствующими линиями обозначены:
• черной пунктирной линией – кабели электропитания 230 В;
• красной сплошной линией – кабели с фотоприемных устройств;
• оранжевой штрихпунктирной линией – USB-кабели;
• зеленой пунктирной линией – Ethernet-кабели;
• черной сплошной линией – прочие соединительные кабели.
Способ измерения распределения освещенности дорожного покрытия включает следующие операции: измерение показаний освещенности не менее чем одной парой разнесенных в пространстве фотоголовок (1), размещаемых на передвижном средстве, при этом одну из фотоголовок размещают впереди в нижней части передвижного средства, другую фотоголовку размещают позади в нижней части передвижного средства. Фотоголовки (1) устанавливают из транспортного положения в положение для измерений с помощью быстросъемного приспособления, что упрощает использование системы для измерения. Формируемые фотоголовками (1) сигналы (фототок) усиливают программируемым многодиапазонным усилителем фототока (3). Усиленный сигнал оцифровывают аналого-цифровым преобразователем (4), т.е. осуществляют его перевод в цифровой вид, пригодный для записи на электронные носители. Оцифрованные сигналы передают и записывают в запоминающее устройство многоканального фотометра (9) в виде значений освещенности, при этом значение освещенности в конкретной точке дороги определяют суммированием показаний, измеренных каждой парой фотоголовок (1) в одной и той же точке на дороге с разных ракурсов – спереди и сзади, а координаты конкретной точки определяют с помощью устройства измерения скорости и пройденного расстояния (5). Измерение освещенности исследуемых точек дороги с разных ракурсов позволяет получить достоверные данные о реальной освещенности. Обработку полученных данных осуществляют с помощью устройства управления и обработки данных, например персонального компьютера (11), позволяющего получить характеристики освещенности с помощью программы. При этом точку начала отсчета и координаты точек измерения освещенности определяют с помощью устройства измерения скорости и пройденного расстояния (5), например оптического устройства (датчика) измерения скорости и пройденного расстояния (5). В качестве датчика пройденного пути может быть использован также лазерный измеритель расстояния, например ИСД-5. Для указания места измерений на карте используют систему Глонасс /GPS (10).
Автоматизированный комплекс содержит не менее пары разносимых в пространстве фотоголовок (1), оптический датчик измерения скорости и расстояния (5), усилители фототока (3), устройство обработки данных (11), преобразователь напряжения (12), при этом фотоголовки размещают спереди и сзади передвижного средства, с выносом за его габариты. В качестве передвижного средства, на котором может размещаться автоматизированный комплекс, может быть использовано любое транспортное средство, но наиболее приемлемым является автомобиль, который в совокупности с автоматизированным комплексом образует передвижную лабораторию. Фотоголовки (1) соединены с многоканальным с фотометром (9) с помощью герметичных разъемов (2) посредством кабеля передачи данных (18) через многодиапазонные усилители фототока (3), расположенные в корпусе многоканального фотометра (9). Устройство измерения расстояния и скорости (5) связано с многоканальным фотометром (9) и устройством управления и обработки данных (11). В качестве оптического датчика пройденного пути может быть использован оптический измеритель скорости и дистанции или лазерный измеритель расстояния, например ИСД-5. Фотоголовки жестко закреплены на вибростойком основании (17), в качестве которого может быть использовано резиновое покрытие BSW, Германия, марки Regufoam, включающем блок термостабилизации. Приемные поверхности (14) фотоголовок (1) снабжены двумя защитными экранами: с одной стороны приемная поверхность фотоголовки закрыта светонепроницаемым экраном (16), а с другой стороны – защитным оптическим колпаком (15). Усилители фототока (3) выполнены программируемыми и двенадцатидиапазонными, которые соответственно имеют 12 диапазонов измерения, обладающих различной чувствительностью, что обуславливает высокую чувствительность и точность фотодатчиков при измерениях в широком диапазоне изменений сигнала (диапазон измерения освещённости от 0,0001 до 200 000 Лк). Это позволяет наиболее полно и точно оценить степень и качество освещенности на исследуемых участках дорожного покрытия. Выходные сигналы усилителей фототока (3) сканируются аналого-цифровым преобразователем (4) синхронно с частотой дискретизации 10 кГц. Устройство измерения расстояния и скорости (5) связано с многоканальным фотометром (9) экранированным коаксиальным кабелем, а с устройством управления и обработки данных (11) – посредством кабеля Ethernet. Для связи между элементами конструкции используют сетевой коммутатор (8). Информация из многоканального фотометра (9) поступает на РС (11) после завершения измерений из внутренней флэш-памяти фотометра (9) и после этого обрабатывается.
По контуру основания фотоголовки (1) может быть закреплена светодиодная лента для указания внешних габаритов измерительного комплекса, размещенного на средстве передвижения, например на автомобиле, что важно для обеспечения безопасности передвижного средства при использовании способа и комплекса в реальных условиях на дорогах.
Автоматизированный комплекс и способ измерения распределения освещенности дорожного покрытия работают следующим образом.
Автоматизированный комплекс измерения распределения освещенности дорожного покрытия устанавливается на любое передвижное средство, в частности автомобиль, что позволяет проводить измерения во время движения этого средства без перекрытия движения на трассе. Автоматизированный измерительный комплекс построен по принципу измерительной системы с разнесёнными в пространстве приемниками.
Для проведения измерений фотоголовки (1) устанавливают спереди и сзади по 2 шт. на транспортное средство (13) на одинаковой высоте вдоль прямой, параллельной центральной оси транспортного средства (13), образуя две пары (в пару входят два устройства, расположенные друг напротив друга на одной оси спереди и сзади). Таких пар может быть одна, две и более в зависимости от ширины исследуемого дорожного покрытия. Оптимальным вариантом является использование двух пар фотоголовок. Каждая из фотоголовок (1) имеет по два защитных экрана: прозрачный экран (15), закрывающий приемную поверхность (14) фотоголовки (1) от механических повреждений, и непрозрачный экран (16), ограничивающий попадание на приемную поверхность (14) фотоголовки посторонних световых потоков. Фотоголовки устанавливаются таким образом (см. фиг. 1), чтобы непрозрачный экран (16) фотоголовки (1) находился со стороны транспортного средства (13). При проведении измерений передние фотоголовки (1) регистрируют значение освещенности, создаваемое дорожными осветительными приборами, расположенными впереди передвижного транспортного средства (13) по ходу его движения, а задние фотоголовки (1) регистрируют значение освещенности от осветительных приборов, расположенных сзади передвижного транспортного средства (см. фиг. 3).
Показания от фотоголовок (1) фиксируются при движении транспортного средства (13) и автоматически записываются на запоминающее устройство многоканального фотометра (9). При проведении измерений одновременно с записью информации от фотоголовок (1) считывается и сохраняется на запоминающее устройство многоканального фотометра (9) информация о пройденном автомобилем пути в текущий момент времени с помощью блока измерения скорости и расстояния (5).
Оптический датчик (5) и многоканальный фотометр (9) связаны между собой посредством экранированного коаксиального кабеля для того, чтобы обеспечить синхронизацию между измерениями пройденного пути и измерением освещенности от всех четырех фотодатчиков. При движении мобильной лаборатории от блока обработки сигнала (6), который входит в состав оптического датчика (5), через каждый 1 мм пройденного пути вырабатываются триггерные сигналы. Триггерные сигналы через блок согласования сигнала триггера (7) подаются на триггерный вход многоканального фотометра (9), который подсчитывает количество пришедших триггеров на момент измерения значения освещенности от всех четырех фотодатчиков (в случае использования двух пар фотоголовок (1)). Данные от оптического датчика (5) в виде количества пришедших триггеров, которое эквивалентно пройденному расстоянию в миллиметрах, и соответствующие им значения освещенности записываются (сохраняются) на внутреннюю флэш-память фотометра (9). Пример записи данных приведен в Таблице 1.
Таблица 1. Структура данных, сохраняемых во внутренней памяти фотометра при проведении измерений
В столбце «Путь (мм)» приведено расстояние (в миллиметрах), пройденное транспортным средством (13) с начала измерений до момента измерения освещенности всеми фотодатчиками (1).
В столбцах «Датчик…» приведены значения освещенности в люксах, измеренные фотодатчиками (1).
В столбцах «КУ…» указан номер диапазона усиления многодиапазонного усилителя фототока (3).
Таким образом, фотоголовки (1), расположенные спереди и сзади передвижного средства (13), образующие пару, при измерениях последовательно попадая поочередно в одну и ту же точку пространства, снимают информацию о создающейся освещенности от всех близлежащих осветительных приборов на исследуемом участке дороги в этой точке, образуя вместе один фотоприемник, пространственно разнесенный в плоскости измерения.
После завершения измерений информация из многоканального фотометра (9) поступает на РС (11) из внутренней флэш-памяти фотометра и после этого обрабатывается.
Полученные данные об освещенности, GPS-координатах и пройденном расстоянии/мгновенной скорости поступают в устройство управления и обработки данных – персональный компьютер РС (11), которое с помощью разработанного программного обеспечения МСЛ-Софт, рег. № 2014614480, зарегистрированного в Реестре программ для ЭВМ 25 апреля 2014 г., обеспечивает сведение показаний этих устройств. Точность сведения достигается использованием в автоматизированном комплексе высокоточных приборов для определения мгновенной скорости и пройденного расстояния. В автоматизированном комплексе используется оптический датчик (5) измерения скорости и пройденного пути ИСД-3, позволяющий фиксировать перемещение автомобиля (и соответственно, фотодатчиков) с точностью до 1 мм, что позволяет достичь высокой точности сведения показаний с фотодатчиков.
Автоматизированный комплекс для измерения распределения освещенности дорожного покрытия на автодорогах содержит преобразователь напряжения 12/230 В (инвертор) (12), служащий для питания всех устройств комплекса напряжением 230 В частотой 50 Гц. Он преобразует постоянное напряжение бортовой сети автомобиля 12 В в переменное синусоидальное напряжение 230 В частотой 50 Гц.
На фиг. 1 черной пунктирной линией показано, какие устройства он питает, а именно:
• многоканальный фотометр (9), а через него – АЦП (4) и усилители фототока (3);
• устройство управления и обработки данных (11) (персональный компьютер);
• блок обработки сигнала (6), который, в свою очередь, питает оптический датчик (5);
GPS/Глонасс-приемник (10) и блок согласования сигнала триггера (7) питаются от персонального компьютера PC (11) через USB-кабели.
Блок обработки сигнала (6) входит в состав оптического датчика (5) и служит для подачи питания и управления оптическим датчиком (5), также он формирует триггерный сигнал, поступающий на многоканальный фотометр (9) через блок согласования триггера (7), для передачи сигнала триггера. Блоки связаны с PC (11) посредством Ethernet-кабеля (через коммутатор (8)).
Блок согласования триггера (7) служит для согласования уровней сигнала триггера, поступающего от блока обработки сигнала (6) на многоканальный фотометр (9), и связан экранированным коаксиальным кабелем с этими устройствами. Блок согласования триггера (7) подключается к PC (11) посредством USB-кабеля.
Ethernet-коммутатор обеспечивает высокоскоростное Ethernet-подключение нескольких устройств к устройству управления и обработки данных (11), а именно:
• многоканального фотометра (9);
• блока обработки сигнала с ОД (6).
После проведения измерений на экране монитора устройства управления и обработки данных, например персонального компьютера PC (11), с помощью программного обеспечения МСЛ-Софт отображаются результаты измерений в виде четырех графиков по числу используемых четырех фотоголовок (фиг. 4). В случае если будет использовано большее количество фотоголовок, в результате получится большее количество графиков.
После этого происходит автоматическое сведение результатов, полученных от пар фотоголовок (1), в данном случае – от двух пар. В результате такой обработки получают два графика (по числу пар фотоголовок) распределения освещенности на контрольном участке вдоль линий расположения ФУ на транспортном средстве (фиг. 5). Дальнейшую обработку проводят в полуавтоматическом режиме: выбирают длину измерительного поля, количество точек измерения и определяют нормируемые параметры освещенности.
Способ измерения распределения освещенности дорожного покрытия и автоматизированный измерительный комплекс реализованы заявителем с помощью программных и аппаратных средств, опытный образец именуется «Программно-аппаратный измерительный комплекс (ПАИК)», в котором были использованы следующие элементы и устройства:
1. В качестве фотоприемных устройств (1) для измерения освещенности были использованы термостабилизированные фотоголовки (4 шт.), например P15FOT с блоком термостабилизации компании LMT (Германия), с экранирующими козырьками. Предел общей допускаемой неопределенности измерений не превышает 5 %. Диапазон измерения освещённости – от 0,0001 до 200 000 лк, частота регистрации данных – до 100 кГц, диапазон рабочих температур – от –10 до +50 °С (с учетом термостатирования). Фотоголовки размещены на виброустойчивых платформах, по краю которых при необходимости может быть закреплена светодиодная лента для указания габаритов измерительной системы.
2. Многоканальный фотометр (9), выполненный на основе одноплатного компьютера и платы расширения (модуля аналогового ввода-вывода Diamond-MM-32DX-AT). Включает в себя следующие компоненты:
2.1. Одноплатный компьютер (SBC – Single Board Computer) SBS PCM-3353 формата PC/104-Plus с операционной системой реального времени RT Linux.
2.2. Плата расширения – модуль аналогового ввода-вывода и оцифровки аналогового сигнала DMM-32DX-AT производства компании Diamond Systems. Отличительной особенностью модуля является 16-битный ЦАП, программно и аппаратно конфигурируемый, буферированная шина PC/104 и расширенный универсальный набор драйверов, включающий поддержку популярных встраиваемых операционных систем Linux, RT Linux, Windows 2000/XP, Windows CE, VxWorks, QNX и DOS.
Диапазон рабочих температур составляет от –40 до +85 °С.
2.3. Блок питания. ATX-700PNR PRO.
2.4. Интерфейс для сетевого подключения – Ethernet.
2.5. Интерфейс для подключения фотоголовок: ВNC-разъемы для подключения коаксиального кабеля c волновым сопротивлением 50 Ом с ВNC-коннекторами.
3. Оптический датчик скорости и расстояния ИСД-3.
Оптический датчик ИСД-3 (ООО «Сенсорика-М») предназначен для проведения высокоточных и бесконтактных измерений скорости и дистанции передвижения транспортного средства относительно дорожного покрытия. Принцип измерения – растровая пространственная фильтрация изображения объекта. Внесен в Госреестр средств измерений, интервал между поверками – 1 год.
Основные параметры оптического измерителя скорости:
– широкий диапазон измерений скорости: 0,2-50 м/с (0,72–180 км/ч);
– разрешение при измерении скорости: 0,0001 м/с (0,1 мм/с);
– высокая точность измерений:
абс. погрешность измерения скорости:
± 0,01 м/с (для скоростей до 25 км/ч);
± 0,15 % (для скоростей от 25 до 180 км/ч);
точность измерения расстояния: не более ±0,15 % СКО.
В заявленном измерительном комплексе оптический датчик измерения скорости и расстояния (5) используется для точного определения относительных координат (относительно стартовой точки) фотодатчиков. Координаты фотодатчиков в момент времени измерения освещенности необходимы для сведения показаний фотодатчиков при обработке результатов измерений.
4. Навигационный GPS-приёмник GlobalSat MR-350s4 с физическим (проводным) интерфейсом PS/2 и переходником на USB и встроенной активной антенной. Предназначен для определения местоположения участков измерения. Непосредственно для проведения измерений освещенности не используется, нужен для документирования местоположения объекта измерений. Может быть использован для определения координат начальной точки отсчета.
5. Инвертор.
Инвертор (преобразователь напряжения) преобразует постоянное напряжение аккумулятора или электросети автомобиля 12 В в переменное синусоидальное напряжение 220 В с частотой 50 Гц. Используется для обеспечения электропитания устройств, работающих от сети 220 В/50 Гц.
В заявленном комплексе может быть использован инвертор ИС-12-300 12В/220В с синусоидальным выходным напряжением частотой 50 Гц, номинальной мощностью 300 Вт. Качественные характеристики такого напряжения аналогичны характеристикам напряжения в бытовой сети.
6. Ethernet коммутатор (Сетевой коммутатор).
Предназначен для передачи потоков данных от различных элементов измерительной системы на ПК для программы сбора и обработки данных, в заявленном комплексе может быть использован коммутатор DES-1005D10/100 Mбит/c компании D-Link.
7. Программное обеспечение для мобильной автоматической системы измерения освещённости МСЛ-Софт (R).
Программа МСЛ-Софт (R) разработана для сбора и обработки данных с датчиков измерения освещённости многоканального фотометра, датчика скорости и GPS-приёмника. Структурная блок-схема программы приведена на фиг. 6.
Многоканальный фотометр (9) подключается к устройству управления и обработки данных (персональному компьютеру – PC) (11), на котором установлена программа МСЛ-Софт (R), через Ethernet соединение. Посредством такого же соединения через блок обработки сигнала (6) к PC (11) подключается оптический датчик измерения скорости и расстояния (5). Подключение оптического датчика измерения скорости и расстояния (5) к многоканальному фотометру (9) осуществляется через блок согласования сигнала триггера (7) с помощью экранированного коаксиального кабеля с ВNC-разъемами. GPS/Глонасс-приемник (10) подключается к USB-порту PC (11) с помощью USB-кабеля.
Чтобы приступить к измерениям, оператор, осуществляющий управление процессом измерений, должен запустить на PC (11) программу МСЛ-Софт и дать старт началу измерения, а транспортное средство (автомобиль) (13) с установленным оборудованием должен начать движение. При движении автомобиля происходит измерение уровня освещенности с помощью передних и задних фотодатчиков (1), данные с которых поступают и записываются на внутреннюю память многоканального фотометра (9) синхронно с данными оптического датчика измерения скорости и расстояния (5) о пройденном расстоянии. Данные GPS/Глонасс-приемника (10) записываются на постоянное запоминающее устройство (ПЗУ) РС (11). Также для осуществления контроля за ходом измерений все вышеуказанные данные периодически отображаются на экране монитора РС (11).
Для завершения измерений оператор останавливает работу программы, при этом результаты измерений из внутренней памяти многоканального фотометра (9) автоматически выгружаются на постоянное запоминающее устройство РС (11) для последующей обработки, а внутренняя память многоканального фотометра (9) освобождается для следующего цикла измерений.
Заявленное изобретение может быть реализовано в условиях массового производства с использованием стандартных комплектующих.

Предложен способ измерения распределения освещенности дорожного покрытия на автодороге. Измеряют показания освещенности дороги парой разнесенных в пространстве фотоголовок (1), размещаемых на передвижном средстве (13). Одну из фотоголовок (1) устройств размещают впереди передвижного средства (13), другую фотоголовку (1) размещают позади передвижного средства (13). Формируемые фотоголовкой (1) сигналы усиливают многодиапазонным усилителем (3) фототока. Усиленный сигнал оцифровывают аналого-цифровым преобразователем (4). Оцифрованные сигналы передают и записывают в запоминающее устройство многоканального фотометра (9) в виде значений освещенности. При этом значение освещенности в конкретной точке дороги определяют на основании суммирования показаний, измеренных каждой парой фотоголовок (1) в одной и той же точке на дороге. Координаты конкретной точки на дороге определяют с помощью устройства измерения скорости и пройденного расстояния. Предложен также автоматизированный комплекс для измерения распределения освещенности дорожного покрытия на автодорогах. Достигается повышение скорости, качества и достоверности измерений параметров освещения дорожного покрытия. 2 н. и 9 з.п. ф-лы, 6 ил., 1 табл.
1. Способ измерения распределения освещенности дорожного покрытия на автодороге, включающий измерение показаний освещенности дороги не менее чем одной парой разнесенных в пространстве фотоголовок, размещаемых на передвижном средстве, при этом одну из фотоголовок устройств размещают впереди передвижного средства, другую фотоголовку размещают позади передвижного средства, формируемые фотоголовкой сигналы усиливают многодиапазонным усилителем фототока, усиленный сигнал оцифровывают аналого-цифровым преобразователем, оцифрованные сигналы передают и записывают в запоминающее устройство многоканального фотометра в виде значений освещенности, при этом значение освещенности в конкретной точке дороги определяют на основании суммирования показаний, измеренных каждой парой фотоголовок в одной и той же точке на дороге, а координаты конкретной точки на дороге определяют с помощью устройства измерения скорости и пройденного расстояния.
2. Способ по п. 1, отличающийся тем, что точку начала отсчета и координаты точек измерения освещенности определяют с помощью устройства измерения скорости и пройденного расстояния.
3. Способ по п. 1, отличающийся тем, что формируемые фотоголовкой сигналы усиливают программируемым многодиапазонным усилителем фототока.
4. Способ по п. 1, отличающийся тем, что координаты конкретной точки определяют с помощью устройства измерения скорости и пройденного расстояния.
5. Способ по п. 1, отличающийся тем, что для указания места измерений на карте используют систему Глонасс/GPS.
6. Автоматизированный комплекс для измерения распределения освещенности дорожного покрытия на автодорогах, содержащий не менее одной пары фотоголовок, датчик измерения скорости и расстояния, усилители фототока, устройство управления и обработки данных, преобразователь напряжения, при этом фотоголовки соединены с многоканальным фотометром посредством кабеля передачи данных через многодиапазонные усилители фототока, расположенные в корпусе многоканального фотометра, многоканальный фотометр связан с устройством управления и обработки данных, устройство измерения расстояния и скорости связано с многоканальным фотометром и устройством управления и обработки данных.
7. Автоматизированный комплекс по п. 6, отличающийся тем, что фотоголовки жестко закреплены на вибростойком основании, включающем блок термостабилизации.
8. Автоматизированный комплекс по п. 6, отличающийся тем, что усилители фототока выполнены двенадцатидиапазонными.
9. Автоматизированный комплекс по п. 6, отличающийся тем, что устройство измерения расстояния и скорости связано с многоканальным фотометром посредством экранированного коаксиального кабеля.
10. Автоматизированный комплекс по п. 6, отличающийся тем, что устройство измерения расстояния и скорости связано с устройством управления и обработки данных посредством кабеля Ethernet.
11. Автоматизированный комплекс по п. 6, отличающийся тем, что для связи между элементами конструкции используют сетевой коммутатор.
| CN 103123295 A, 29.05.2013 | |||
| CN 204795766 U, 18.11.2015 | |||
| WO 2011067117 A1, 09.06.2011. |

