Известен погрузчик грузов, содержащий самоходную тележку, имеющую рабочее место водителя и механизм управления аккумуляторами, и устройство для захвата и перемещения грузов.
Предлагаемый погрузчик позволяет повысить маневренность. Достигается это тем, что устройство для захвата и перемещения навоев выполнено в виде трех последовательно соединенных четырехзвенных рычажных механизмов, несущих желоб для укладки навоев, свободно размещающийся вдоль тележки в положении транспортирования под рабочим местом водителя.
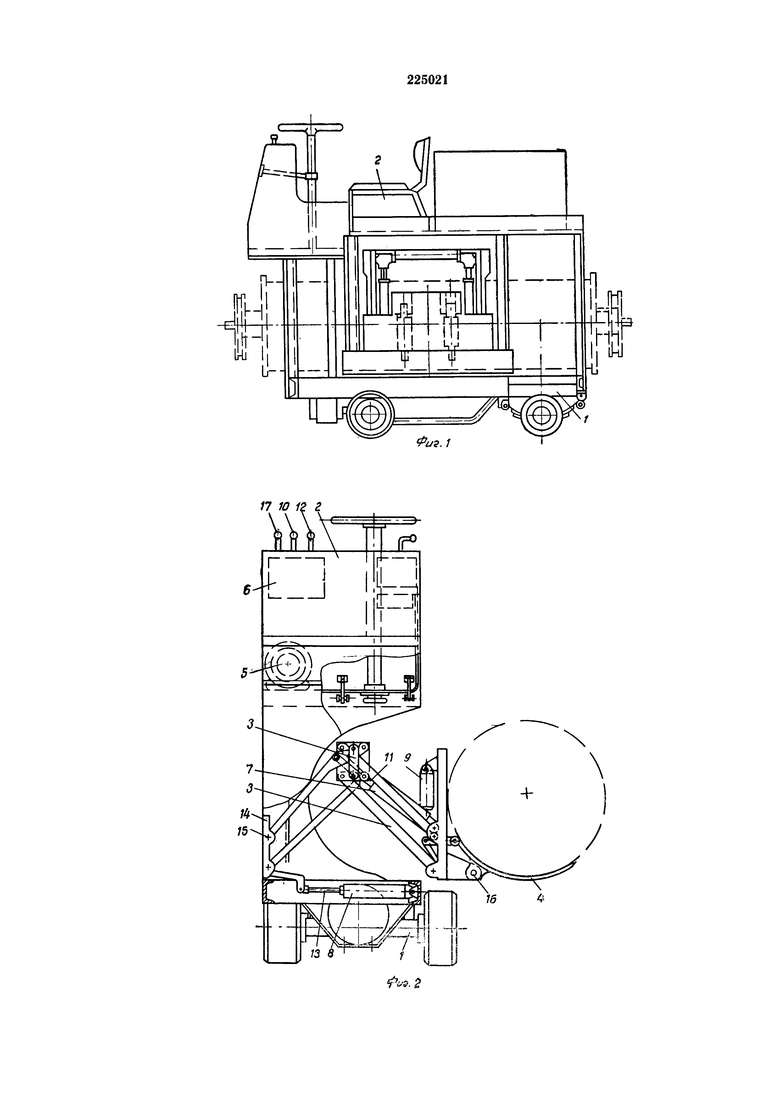
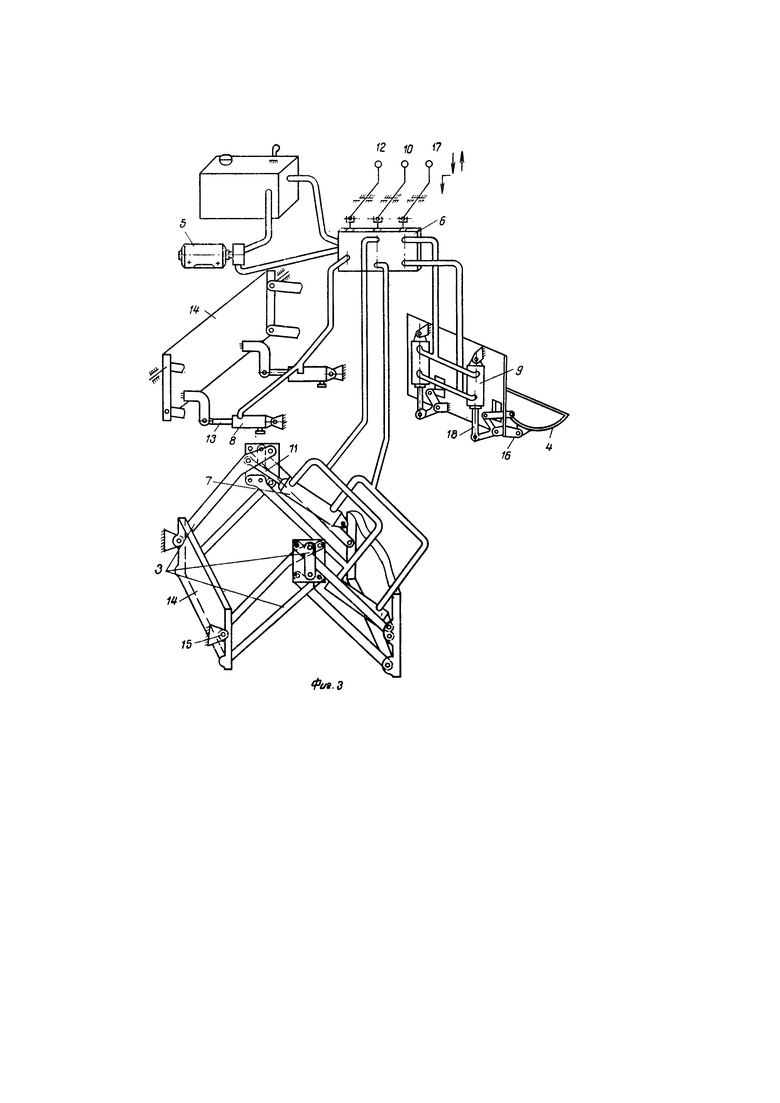
На фиг. 1 приведен погрузчик, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - принципиальная схема привода устройства для захвата и перемещения навоев.
Предлагаемый погрузчик навоев содержит самоходную тележку 1, имеющую рабочее место 2 водителя, устройство для захвата и перемещения навоев и механизм его управления.
Устройство для захвата и перемещения навоев выполнено в виде последовательно соединенных четырехзвенных рычажных механизмов 3, несущих на свободном конце желоб 4 для укладки навоев, свободно размещающийся вдоль тележки в положении транспортирования под рабочим местом водителя.
Механизм управления устройством для захвата и перемещения навоев выполнен в виде гидропривода, содержащего гидронасос 5, соединенный через золотниковый распределитель 6 с гидроцилиндрами 7, 8 и 9, смонтированными на четырехзвенных рычажных механизмах.
Работает устройство следующим образом.
Рычагом 10 управления соединяют гидронасос 5 с гидроцилиндром 7, при этом рабочая жидкость под давлением поступает в гидроцилиндр 7, поршень 11 которого через рычажный механизм 3 перемещает желоб 4 в горизонтальном положении. Рычаг 12 золотникового распределителя 6 управляет работой гидроцилиндра 8, поршень 13 которого поворотом плиты 14 вокруг оси 15 производит опускание или подъем желоба.
Поворот желоба 4 вокруг оси 16 для захвата навоя осуществляется рычагом 17 распределителя 6, который управляет работой гидроцилиндра 9. Поршень 18 гидроцилиндра под действием рабочей жидкости производит поворот желоба. Комбинированным действием рычагов 10, 12, 17 распределителя 6 подводят желоб под навой и затем обратными действиями заводят его с навоем под рабочее место водителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕЖКА ДЛЯ ТРАНСПОРТИРОВАНИЯ И УКЛАДКИ ТКАЦКИХ НАВОЕВ | 1966 |
|
SU184713A1 |
| ТЕЛЕЖКА ДЛЯ ПЕРЕВОЗКИ И УКЛАДКИ НАВОЕВ НА ТКАЦКИЙ СТАНОК | 1969 |
|
SU239054A1 |
| ШИРОКОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2019949C1 |
| Многофункциональный самоходный гидравлический модуль | 2020 |
|
RU2734862C1 |
| Гидромеханический импульсный агрегат | 1987 |
|
SU1666691A1 |
| Самоходное транспортное средство Сидоренко | 1990 |
|
SU1738086A3 |
| РУЧНОЙ ГИДРАВЛИЧЕСКИЙ ПОГРУЗЧИК УСТРОЙСТВ С ЛИСТЬЯМИ ТАБАКА, НАНИЗАННЫМИ НА ДВОЙНЫЕ ДВУСТОРОННИЕ ИГЛЫ | 2016 |
|
RU2618555C1 |
| Устройство для загрузки крытых железнодорожных вагонов | 1957 |
|
SU111559A1 |
| САМОХОДНАЯ МАШИНА ДЛЯ ТРАНСПОРТИРОВКИ И СМЕНЫ БОЙКОВ И ШТАМПОВ | 1972 |
|
SU329936A1 |
| Кабелеукладочная машина | 1981 |
|
SU1033660A1 |
Погрузчик ткацких навоев и тому подобных грузов, содержащий самоходную тележку, имеющую рабочее место водителя и механизм управления аккумуляторами, и устройство для захвата и перемещения навоев, отличающийся тем, что, с целью повышения маневренности, устройство для захвата и перемещения навоев выполнено в виде трех последовательно соединенных четырехзвенных рычажных механизмов, несущих желоб для укладки навоев, свободно размещающийся вдоль тележки в положении транспортирования под рабочим местом водителя.
