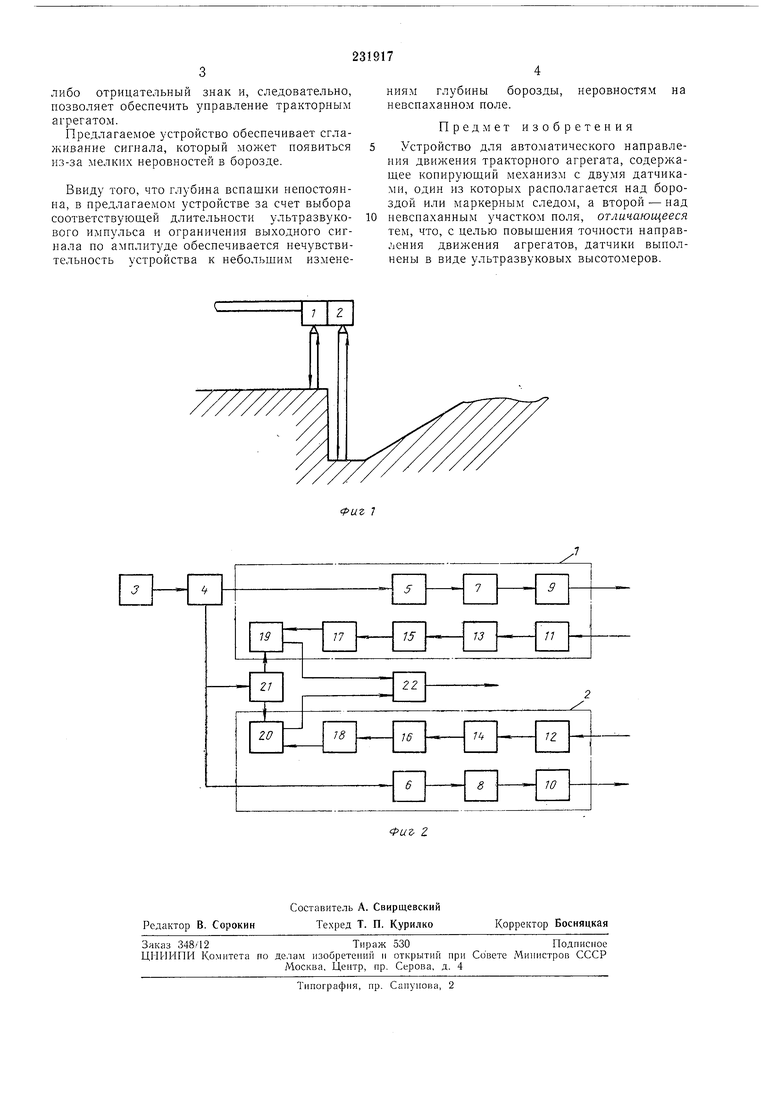
Известные устройства для автоматического направления движения тракторных агрегатов содержат копирующий механизм с двумя датчиками, один из которы.х располагается над бороздой или маркерным следом, а второй - над невспаханным участком поля. Датчики устройств выполнены емкостными. Однако эти устройства не обесиечивают высокой точности вождения трактора вследствие погодных условий - влажности почвы и воздуха. Предлагаемое устройство отличается тем, что датчики выполнены в виде ультразвуковых высотомеров. Это позволяет повысить точность направления движения агрегатов. На фиг. 1 изображена принциниальная схема расположения датчиков над бороздой или маркерным следом; на фиг. 2 - блок-схема предложенного устройства. Устройство состоит из двух ультразвуковых высотомеров. Высотомер / находится над невспаханным полем, а высотомер 2 - над бороздой или маркерным следом. Устройство представляет собой импульспый двухканальный ультразвуковой локатор, в котором задающий блокинг-генератор . вырабатывает колебания и запускает ждущий мультивибратор 4. С выхода мультивибратора снимаются прямоугольные импульсы необходимой длительности, которые включают генераторы 5 6 ультразвуковых колебаний соответственно высотомеров I и 2. Генераторы 5 6 работают на различных частотах. Ультразвуковые колебания уснливаются в соответствующих резонансных усилителях 7 и S и излучаются передатчиками 9 и 10 высотомеров. Отраженные сигналы иринг1маются приемНЕ гми устройствами И и 12, настроенными на несущие частоты высотомеров, демодулнруются в ампл ггудных демодуляторах 13 и 14, усиливаются в резонансных усилителях 15 и 16, л затем ограничиваются в формирующих триггерах 17 II 18 н поступают на схемы сравнения 19 и 20. Па эти же схемы приходит сигнал с генератора 21 пилообразных напряжений, запускаемого одновременно с генераторами 5 и б от ждущего мультивибратора. Со схем сравнения снимаются сигналы, пропорциональные измеряемой высоте, и подаются на низкочастотный усилитель 22, на выходе которого вырабатывается управляющий сигнал. Если высотомеры расноложены относительно борозды или маркерного следа так, как показано на фиг. 1, то управляющий сигнал, сиимаемый с низкочастотиого ус 1лителя, равен нулю; еслн же высотомеры оказываются смещенны.ми в ту или ииую сторону, то управляющий сигнал имеет либо положительный,
либо отрицательный знак и, следовательно, позволяет обеспечить управление тракторным агрегатом.
Предлагаемое устройство обеспечивает сглаживание сигнала, который может появиться из-за мелких неровностей в борозде.
Ввиду того, что глубина вспашки непостоянна, Б предлагае мом устройстве за счет выбора соответствующей длительности ультразвукового импульса и ограничения выходного сигнала по амплитуде обеспечивается нечувствительность устройства к небольшим изменениям глубины борозды,
неровностям на невспаханном поле.
Предмет изобретения
Устройство для автоматического направления движения тракторного агрегата, содержашее копируюш,ий механизм с двумя датчиками, один из которых располагается над бороздой или маркерным следом, а второй - над невспаханным участком поля, отличающееся тем, что, с целью повышения точности направления движения агрегатов, датчики выполнены в виде ультразвуковых высотомеров.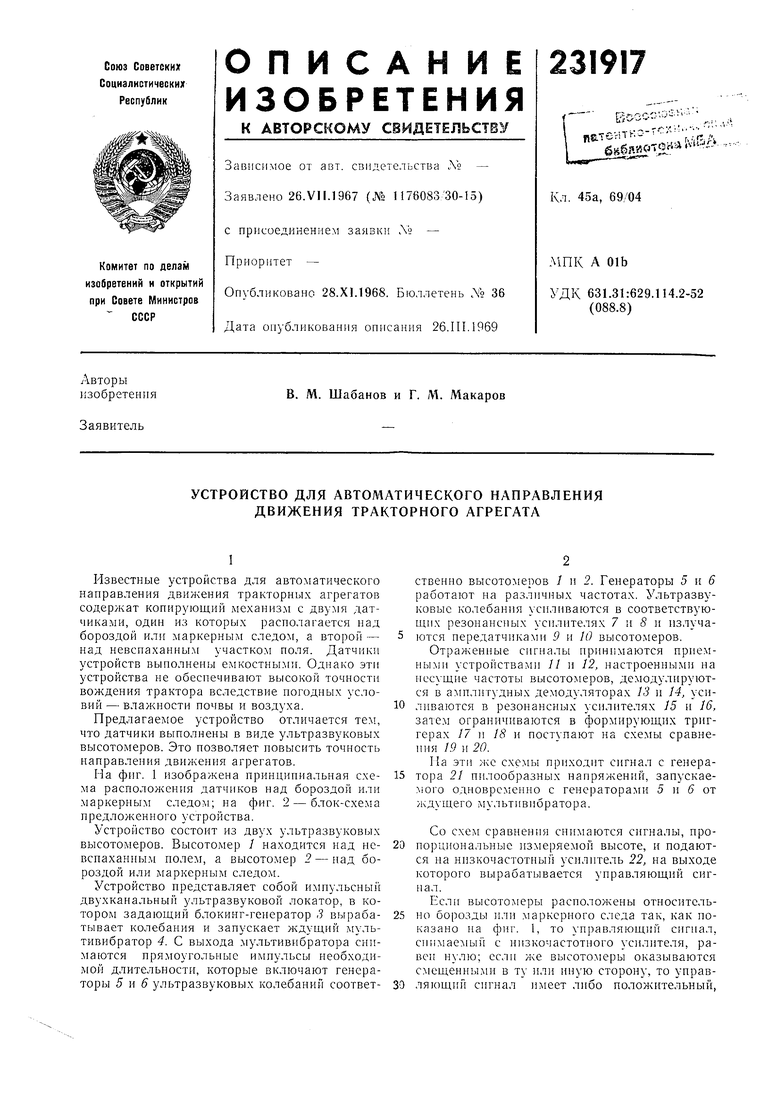
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования положения рабочих органов сельскохозяйственных машин | 1978 |
|
SU865155A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ КОЛЕСНОГО ТРАКТОРА | 1969 |
|
SU232636A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| Устройство для управления движением самоходных агрегатов | 1980 |
|
SU941943A1 |
| Стабилизатор скорости движения транспортного средства | 1977 |
|
SU716886A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ КОЛЕСНОГО ТРАКТОРА | 1972 |
|
SU327892A1 |
| Способ непрерывной регистрации времени распространения ультразвуковых колебаний в веществе | 1977 |
|
SU622002A2 |
| Ультразвуковой генератор | 1972 |
|
SU438088A1 |
| Доплеровский ультразвуковой локатор | 1982 |
|
SU1166790A1 |
| Устройство для автоматического вождения колесного трактора на безотвальной пахоте | 1981 |
|
SU1066473A1 |
