(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ РАБОЧИХ ОРГАНОВ СЕЛЬСКОХОЗЯЙСТВЕННЫХ
1
Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам автоматического регулирования пространственного положения рабочих органов мобильной сельскохозяйственной машины в зависимости от изменяющегося рельефа поля.
Известно устройство для автоматического направления движения тракторного агрегата, состоящее из двух ультразвуковых высотомеров, один из которых расположен над бороздой или маркерным следом, а второй над невспаханным участком поля. Сигналы обоих датчиков обрабатьшаютст в электронной схеме, так, что при смещении высотомеров в ту или иную сторону ., вследствие изменения рельефа (высоты) вырабатывается сигнал рассогласования Соответствукмцей полярности, благодаря чему обеспечивается управление тракторным агрегатом |.
Недостатком этого устройства является узкая зона определения рельеMAJIttiH
фа, сравнительно с шириной захвата агрегата, а также малое число точек (две), характеризующие изменение рельефа в этой узкой зоне при использовании двух датчиков дальности.
Наиболее близким по технической сущности к предлагаемому является устройство для регулирования положения рабочих органов, содержащее ультразвуковой датчик, запирающий блок,
10 блок сигналов опорного уровня, блок сигнала рассогласования, переключающее устройство, усилители и исполнительный орган. При движении агрегата, оборудованного ультразвуковьи автома15том вождения, ультразвуковой датчик периодически облучает направляющую линию (границы) двух сред с различной поглощающей способностью или разной высотой уровня, сигнал от
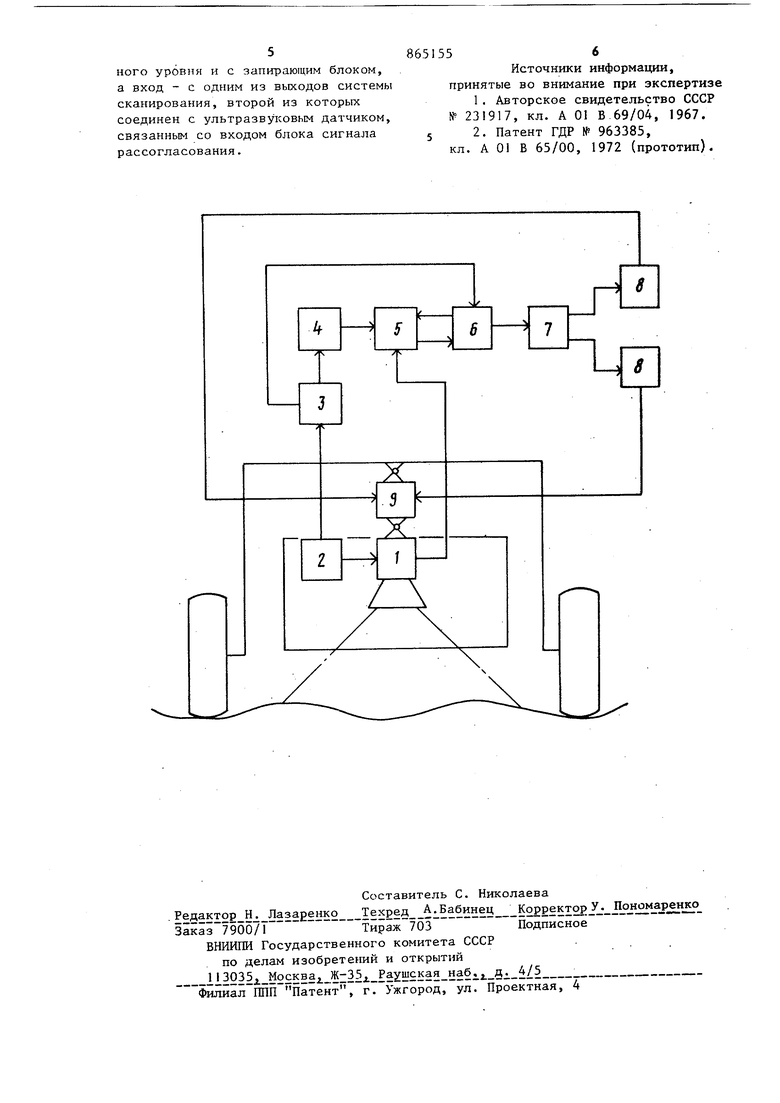
20 датчика преобразуется и обрабатывается в ряде блоков, после чего при отклонении датчика (следовательно и агрегата) от направляющей линии пос тупает на один из двух усилителей и на исполнительный орган, осуществля ющ11й вождение агрегата L2. Недостатком этого устройства является узкая зона определения релье фа, в сравнении с шириной захвата агрегата, обусловленная использованием одного датчика, зафиксированно го неподвижно по отношению к агрега ту или его рабочему органу, что при ВоДцт к недостаточной Точности изме рения рельефа по ширине захвата, Цель изобретения - расширение зо ны определения рельефа и повышение точности измерения рельефа. Эта цель достигается тем, что в устройство вводят систему сканирова ния и датчик углов поворота, причем выходы датчика углов поворота соединены с блоком сигналов опорного уровня и с запирающим блоком, а вход - с одним из выходов системы сканирования, второй выход которой в свою очередь соединен с ультразвуковым датчиком, связанным со входом блока сигнала рассогласования. На чертеже изображено устройство для регулирования положения рабо чих органов сельскохозяйственной ма шины , Устройство содержит бесконтактные, в частности ультразвуковой дат чик 1, систему 2 сканирования, датчик 3 углов поворота, блок 4 сигналов опорного уровня, блок 5 сигнала рассогласования, запирающий блок 6, переключающее устройство 7, усилители 8 и исполнительный механизм 9. Выход ультразвукового датчика 1 соединен с блоком 5 сигнала рассогласования, а вход - с системой 2 сканирования. Второй выход системы 2 сканирования соединен последовате но с датчиком 3 углов поворота, бло ком 4 сигналов опорного уровня, бло ком 5 сигнала ра.ссогласования, запирающим блоком 6, переключающим устройство 7, усилителями 8 и испол нительным механизмом 9. Датчик 3 углов поворота соединен вторым выходом с запирающим блоком 6. Устройство работает следующим образом, . Система 2 сканирования обеспечивает прокачивание луча ультразвукового датчика 1 с определенной скоростью и на определенный угол по отношению к рабочим органам вдоль 554 ширины захвата сельскохозяйственной машины. Датчик 3 углов поворота связанный с системой 2 сканирования, выдает в блок 4 сигналов опорного уровня информацию о текущем угле поворота луча ультразвукового датчика 1. В соответствии с получаемой информацией блок 4 сигналов опорного уровня вырабатывает текущий сигнал, поступающий в блок 5 сигнала рассогласования и соответствующий нормальному пространственному положению рабочего органа по отношению к текущей точке рельефа. Одновременно на вход блока 5 сигнала рассогласования поступает от ультразвукового датчика 1 информация о текущем действительном положении рабочего органа по отношению к рельефу. Б блоке 5 рассогласования информация, поступающая от блока 4 сигналов опорного уровня и ультразвукового датчика 1, сравнивается и накапливается до момента, пока запирающий блок 6 по команде от датчика 3 углов поворота не передаст ее на переключающее устрой ство 7, включающее в зависимости от знака и величины сигнала рассогласо вания тот или иной усилитель 8. Одновременно запирающий блок 6 подает в блок 5 сигнала рассогласования команду Сброс, после чего в блоке сигнала рассогласования повторяется операция сравнения информации от ультразвукового датчика 1 и блока 4 сигнаЛОВ опорного уровня. Соответствующий усилитель 8 подает сигнал на исполнительный механизм 9, осуществляюш 1Й корректировку пространственного положения рабочего органа при его отклонении от заданного. Формула изобретения Устройство для регулирования положения рабочих органов сельскохозяйственных машин, включающее ультразвуковой датчик, блок сигналов опорного уровня, блок сигнала рассогласования, запирающий блок, переключающее устройство, усилители и исполнительный механизм, отличающ е е с я тем, что, с целью расширения зоны определения рельефа и повьщ1ения точности измерений, оно. снабжено системой сканирования и датчиком углов поворота, выходы которого соединены с блоком сигналов опорного УРОВ1ТЯ и с запирающим блоком, а вход - с одним из выходов системы сканирования, второй из которых соединен с ультразвуковым датчиком, связанным со входом блока сигнала рассогласования.
8651556
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 231917, кл. А 01 В 69/04, 1967. 5 2. Патент ГДР № 963385,
кл. А 01 В 65/00, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением самоходных агрегатов | 1980 |
|
SU941943A1 |
| Система управления бульдозерным агрегатом | 1980 |
|
SU870614A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| Устройство для электроэрозионного легирования | 1988 |
|
SU1664486A1 |
| Устройство для считывания и распознавания изображений на карте с электропроводящими элементами | 1983 |
|
SU1124348A1 |
| Устройство для автоматического вождения самоходного агрегата | 1988 |
|
SU1605953A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| Способ минимизации средней высоты полета летательного аппарата, движущегося вблизи неровной поверхности, и устройство для его осуществления | 2021 |
|
RU2764322C1 |
| Способ автовождения сельскохозяйственных агрегатов | 1977 |
|
SU946426A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1981 |
|
RU1055199C |
