Изобретение относится к автоматизации, сельскохозяйственного производства, конкретнее к автоматическому вождению самоходных агрегатов.
Известно устройство для автоматического управления движением тракторного агрегата, используещее импульсный двухканальный ультразвуковой локатор, включающий в себя задающий генератор, мультивибратор, уЬил1Йели, излучатели, приемные устройства, демодуляторы, формирующие триггеры, схемы сравнения. При установке на тракторе один из высотомеров устанавливается над бороздой, а второй над невспаханным участком поля, и схема балансируется так, что управляющий сигнал равен нулю. Если трактор смещается в ту или иную сторону от борозды, появляется сигнал рассогласования, позволяющий обеспечить управление тракторным агрегатом ij .
Наиболее близким к изобретению по технической сущности является устройство, осуществляющее построчное сканирование опорного светоконтрастного перепада с выделением за счет этого угла рассогласования между продольной осью трактора и опорной траекторией, содержащее фотооптический преобразователь, формирующий усилитель, управляемые линии задержки, триггеры, задающие генераторы строк и кадров, счетчик и сумматоры И.
Недостатком указанных:устройств является зависимость сигнала рассогласования от микрорельефа и случайных неровностей поля, приводящая к неточности отслеживания базовой линии.
10 Это связано с тем, что при движении трактора вдоль гона под влиянием микрорельефа, неравномерной деформации шин, трактор вместе с агрегатируемым орудием сползает в ту или иную сто15рону в зависимости от уклона микрорельефа . В свою очередь это приводит к изменению ширины захвата орудия и нарушению агротехнического процесса.
Цель изобретения - расширение об20ласти применения устройства.
Поставленная цель достигается тем, что в устройство содержащее |фазовый дальнометр, к выходу которого подключен формирующий усилитель,
25 счетчик строк, вход которого подключен к генератору строк фазового светодальномера, а первый выход соединен через последовательно соединенные первый злемент И, первую линию
30 задержки с первыми входами первого
и второго триггеров какала поперечного рассогласования, выходы которых подключены к первому и второму входам исполнительного механизмац вход управляемой линии задержки и первые входы третьего и четвертого триггеров канала курсового рассогласования соединены с выходом генератора строк фазового светоДальномера, выход управляемой линии задержки подключен к вторым входам первогд и второго триг геров, второй выход счетчика строк через последовательно соединенные второй элемент И и вторую линию задержки соединен и вторым входом третьего триггера, третий выход счетчика строк через третий элемент И соединен с вторым входом четвертого триггера, выходы третьего и четвертого триггеров подключены к первому и второму входам сумматора,выход которого соединен свторым входом управляемой линии задержки, введены пятый шестой и седьмой.триггеры, формирователи переднего и заднего фронтов информационного сигнала, четвертый элемент И, третью и четвертую линии задержки, причем вход пятого триггера соединен с выходом фо мирующего усилителя, первый выход ПЯТО1ЧЗ триггера через формирователь заднего фронта подключен к первому элементу И и к вторым входам второго и третьего элементов И, второй выход пятого триггера через последовательно соединенные формирователь переднего фронта, четвертый элемент И и третью линию задержки подключен к первым входам шестого и седьмого триггеров, выходы которых соединены с третьим и четвертым входами сумматора, второй вход четвертого элемента И подключен к первому выходу счетчика строк, второй вход шестого триггера соединен с генератором строк , соединенным через четвертую линию задержки с вторым входом седьмого триг гера,
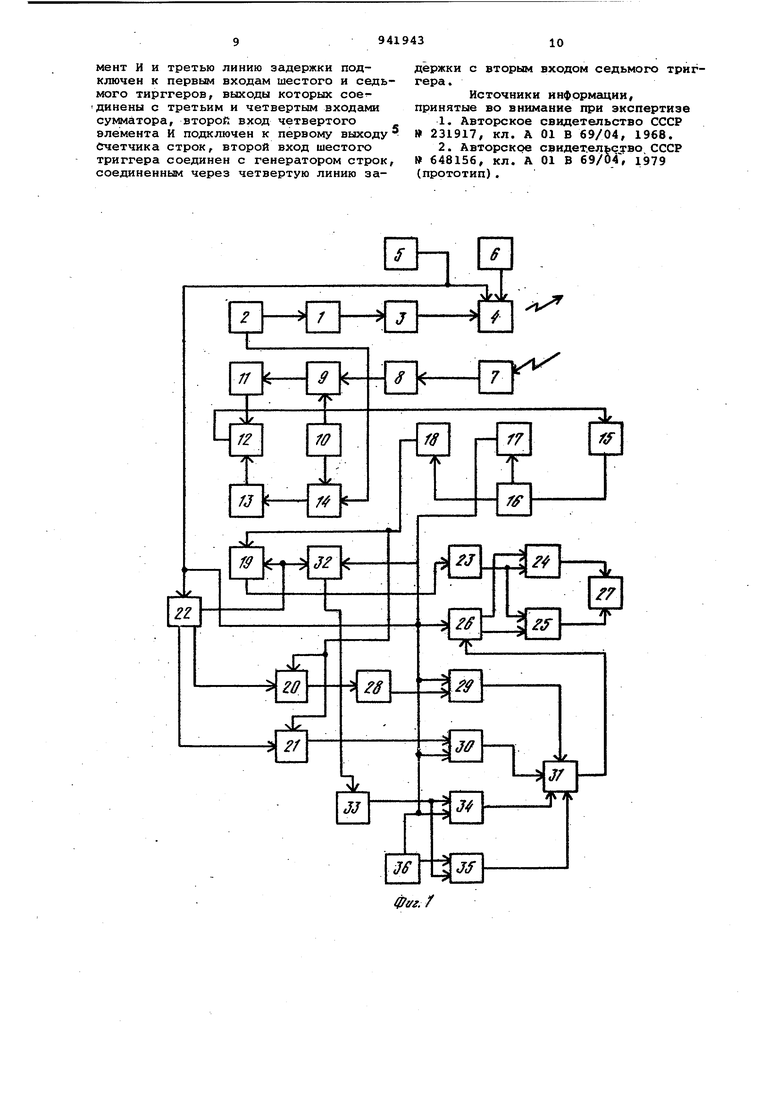
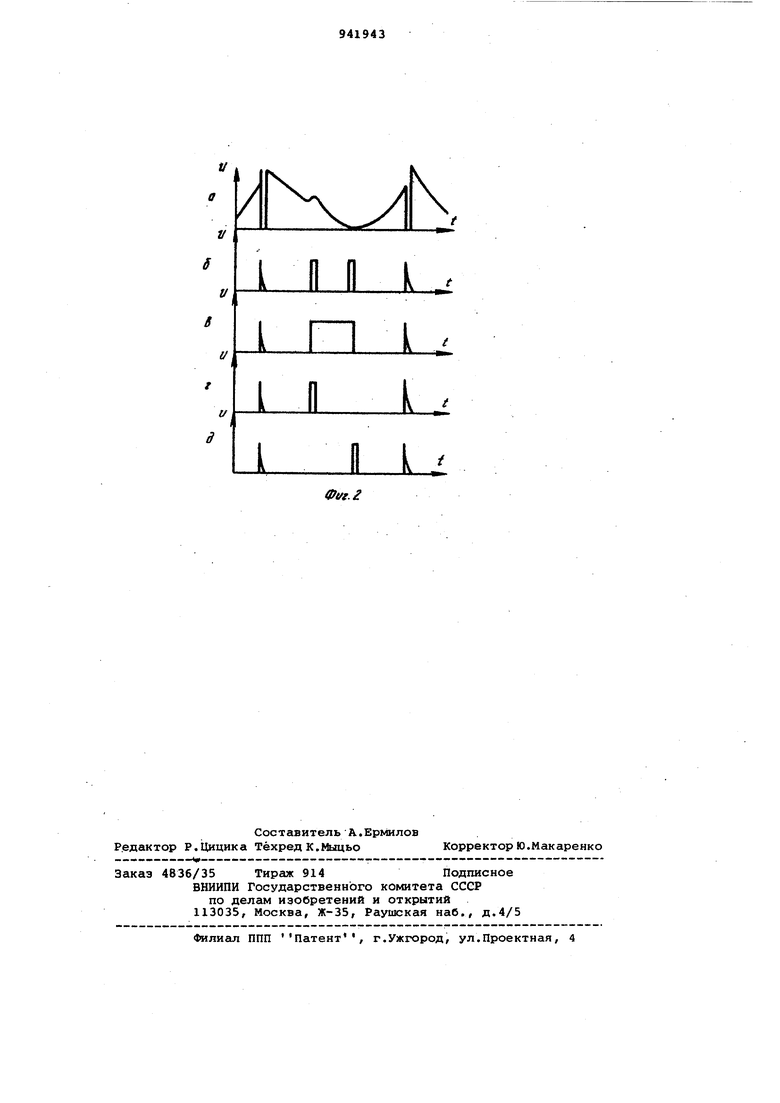
На фиг.1 Изображена блок-схема устройства; на фиг.2 - временныедиа.граммы работы устройства.
Устройство состоит из фазового светодальномера, в состав которого входят оптико-квантовый генератор 1, модулятор 2, оптический элемент 3, скандирующий блок 4 г генераторы стро 5 и кадров б, фотооптический преобразователь 7, фильтр 8, смеситель 9, опорный генератор 10, усилитель 11 промежуточной частоты и фазовый детектор 12, усилитель 13 промежуточной частоты и смеситель 14.
Креме того, в состав устройства входят форг.|дарующий усилитель 15, пятыйтриггер 16, формирователи переднего 17 и заднего 18 фронтов информационного сигнала, первый, второй и третий элементы И 19-21, счетчик 22
строк, первая линия 23 задержки, первый и второй триггеры 24 и 25, управлявшая линия 26 задержки, исполнительный механизм 27, вторая линия 28 задержки, третий и четвертый триггеры .29 и 30, сумматор 31, четвертый элеisifeHT И 32, третья-линия 33 задержки,, шестой и седьмой триггеры 34 и 35 и четвертая линия 36 задержки.
Сущность изобретения заключается в выделении сигнала несущего информацию о поперечных кренах самоходного агрегата, вызванных микрорельефом и случайными неровностями поля, и введении этого сигнала в сигнал поперечного рассогласования продольной оси агрегата с базовой линией для стабилизации последнего и воздействия на агрегат рельефа поля.
Устройство работает следующим образом,
Устройство устанавливается на самоходном агрегате. Сигнал оптико-кватового генератора (лазера) 1, промодулированный сигналом модулятора 2 через оптический элемент 3 поступает на сканирующий блок 4. Сканирующий блок с помощью генера;торов строк 5 и кадров 6 осуществляет развертку луча лазера в горизонтальной плоскости в поперечном и продольном направлениях относительно направления движения самоходного агрегата. Отраженный от поверхности земли сигнал попадает на фотооптический преобразователь 7,продольная ось которого совмещена с базовой линией,- представляющей собой, например, след борозд предьщущего прохода агрегата.
В максимальном и минимальном значениях этого сигнала заложена информация о миншлальном расстоянии от фотооптического преобразователя до поверхности земли и расстоянии до базовой, линии.
С целью повышения помехозащищенности и точности измерения в фазовом светодальномере используется преобразование высокочастотного сигнала в низкочастотный. При этом выходной сигнал фотооптического преобразователя 7 через фильтр 8, выделяющий. сигнал модулирующей частоты, поступает на один из входов смесителя 9, на второй вход которого подается сигнал опорного генер.атора 10.
Выходной сигнал смесителя 9 через усилитель 11 промежуточной частоты поступает на один из входов фазового детектора 12, на второй вход которого через усилитель 13 промежуточной частоты и смеситель 14, соединенный с модулятором 2 и опорным генератором 10, подается опорный сигнал. Следовательно на выходе фазового детектора 12 формируется видеосигнал, амплитуда которого пропорциональна разности фаз или расстоянию до точки сканирования в каждый момент времени. При этом максимальное значение видеосигнала (фиг.2а) соответствует минимальному расстоянию до поверхности земли, а его временное положение, отсчитываемое от начала строки, является мерой крена агрегата. Временное положение минимального зна чения видеосигнала отначала строки соответствует поперечному смещению агрегата относительно базовой линии. С выхода фазового детектора 12 этот сигнал поступает на формирующий усилитель 15, осуществляющий формирование двух сигналов одной полярное ти , которые соответствуют максималь ному и минимальному значениям видеосигнала (фиг. 26) . Для разделения этих сигналов последние с выхода формирующего усилителя 15 поступают на пятый триггер 16, а с его выхода (фиг, 2в) - на формирователи переднего 17 и заднего 18 фронтов, которые выделяют импульсы переднего и заднего фронтов перепада выходного напряжения пятого триггера 16 (фиг. 2г,д). Сигнал с вы хода формирователя 18 заднего фронта поступает на первые входы первого, второго и третьего элементов И 19-21 вторые входы которых управляются счетчиком 22 строк, синхронизированным -генератором 5 строк. Первый элемент И 19 пропускает сигнал, соответствующий средней стро Ке растра, временное положение которого относительно начала строки несет информацию о поперечном смещении агрегата относительно базовой линии. Этот сигнал через первую линию 23 за держки поступает на раздельные входы первого и второго триггеров 24 и 25, на вторые входы которых через управляемую линию 26 задержки, поступают опорные сигналы генератора 5 строк. Упрсшляемая линия задержки производит временное разделение опорного генератора строк для управления первым и вторым триггерами 24 и 25 так, что при на хождении агрегата на задан ной траектории движения, сигналы на выходах первого и второго триггеров 24 и 25 отсутствуют. При отклонении агрегата от базовой линии временное соотношение опорных сигналов и выход ного сигнала формирователя 18 Зсщнего фронта изменяется, что вызывает срабатывание одного из первого или второго триггеров 24 или 25 в завйси мости от фазы отклонения агрегата от базовой линии. С выходов этих триггеров сигналы, несущие информацию о величине и фазе отклонения агрегата от базовой линии, поступают на испол нительный механизм 27, который возвращает агрегат на. заданную траекторию движения. Второй элемент и 20 выделяет сигнал сканирующего участка с базовой линией, соответствукмций первой стро- . не растра. Выходной сигнал этого элемента И через вторую линию 28 задержки поступает на раздельный вход третьего триггера 29 курсового рассогласования. Третий/элемент И 21 вьщает сигнал сканирующего участка с базовой линией, соответствующий последней строке растра. С выхода третьего элемента И 21 этот сигнал поступает на раздельный вход четвертого триггера 30 курсового рассогласования. Вторая линия 28 задержки осуществляет временное согласование сигнала первой строки расура с сигналом последней строки растра. На вторые входы третьего и четвертого триггеров 29 и 30 поступает опорный сигнал с выхода генератора 5 строк. Этот опорный сигнал поддерживает один из этих триггеров во включенном состоянии, а второй - в выключенном состоянии. Выходные сигналы этих триггеров поступают на сумматор 31. При отсутствии угла рассогласования между продольной осью агрегата и базовой линией сигналы с выходов второй линии .28 задержки и третьего элемента И 21 одновременно поступают на раздельные входы третьего и четвертого триггеров 29 и 30, поочередно изменяя их состояние. Следовательно на выходе сумматора 31 будет постоянный по амплитуде сигнал, определяемый выходным сигналом того или иного триггера. При появлении угла рассогласования между продольной осью агрегата и базовой линией выходные сигналы второй линии 28 задержки и третьего элемента И 21 поступают на входы третьего и четвертого триггеров 29 и 30 с временным сдвигом один относительно другого. При этом срабатывание этих триггеров происходит не одновременно,. а в зависимости от фазы угла рассогласования появляются моменты времени, когда оба триггера по выходу включены или выключены. На выходе сумматора 31 появляется сигнал, полярность которого относительно уровня выходного сигнала третьего и четвертого триггеров 29 и 30 определяет фазу угла рассогласования,, а его длительность - величину этого угла. Сигнал с выхода сумматора 31 поступает на вход управления управляемой линии 26 задержки, которая осуществляет временный сдвиг опорного сигнала генератора 5 строк отно-сительно начала строки растра, вызы-i вая этим самым срабатывание первого и второго триггеров 24 или 25 в зависимости от фазы временного сдвига. Это вызывает срабатывание исполнительного механизма 27 до момента ликвидации угла курсового рассогласования что позволяет устранить автоколебания агрегата на повышенных скоростях его движения. С выхода формирователя 17 передне FO фронта сигнал, несущий информацию об угле крана агрегатй поступает на вход 1етвертого элемента И 32. Четвертый элемент И 32, управляемый Счетчиком 22 строк, через третью линию 33 за.держки пропускает этот сигнал на раздельные входы шестого и седьмого триггеров 34 и 35 в момент средней строки растра. Третья линия 33 задержки также как и вторая 28 за держки необходима для временного сог ласования сигналов средней строки растра с сигналами последней строки растра. На вторые входы шестого и седьмого триггеров 34 и 35 на один из них непосредственно и на второй через четвертую линию 36 задержки поступает опорный сигналгенератора 5 строк Четвертая линия 36 задержки необходи ма для временного разделения опорного сигнала таким образом, чтобы при отсутствии угла крена агрегата си;гналы на выходах шестого и седьмого триггеров 34 и 35 отсутствовали. При появлении угла крена агрегата временное соотношение опорных сигна:лов и выходного сигнала фо эмирователя 17 переднего фронта изменяется, что вызывает срабатывание одного из шестого и седьмого триггеров 34 и 35 в зависимости от фазы угла крена. Вы ходные сигналы этих триггеров, возде ствуя через сумматор 31 на управляемую линию 26 задержки, осуществляют временной сдвиг опорного сигнала пер вого и второго триггеров 24 и 25. Пр этом в зависимости от фазы этого вре менного сдвига, обусловленной фазой угла крена, срабатывает первый или второй Триггер 24 или 25. Срабатывание первого или второго триггера 24 или 25 вызывает срабатывание исполнительного механизма 27 до момента ликвидации угла крена агрегата, проибводя коррекцию траектории движения агрегата в зависимости от его углов поперечного крена. Использование предлагаемого устро ства позволяет повысить качествоавтоматического вождения самоходного агрегата, а значит, и производительность выполнения сельскохозяйственны работ. Ориентировочный расчет экономической эффективности работы агрегата с устройством автоматического направ ления движения Проведен в соответстВИИ с Отраслевыми методическими указаниями и нормативно-справочным материалом для определения экономической эффективности нОвой техники в тракторном и сельскохозяйственном машиностроении . В основу расчета положены данные О повышении производительности машинно-тракторных агрегатов на 7% за счет автоматизации их вр.ждения и дандые Госплана СССР о выпуске тракторов Т-150К на 1980г в количестве 43000 шт. Таким образом, экономический эффект от внедрения предлагаемого устройстг за из расчета 30% автоматизации тракторов Т-150К от общего их выпуска составит 7,624 млн.руб. или 591 руб. на один комплект. Формула изобретения Устройство для управления движением самоходных агрегатов, содержа- . щее фазовый светодальномер, к выходу которого подключен формирующий усилитель, счетчик строк, вход, которого подключен к генератору строк фазового светодальномера, а первый ВЕЛХОД соединен через последовательно соединенные первый элемент И, первую линию задержки с первыми входами первого и второго триггеров канала поперечного рассогласования, выходы которых подключены к первому и второму входам исполнительного механизма, вход управляемой линии задержки и первые входы третьего и четвертого триггеров канала курсового рассогласования соединены с выходом генератора строк фазового светодальномера, выход управляемой линии задержки подключен к вторым входам первого и второго триггеров, второй выход счетчика строк через последовательно соединенные второй элемент И и вторую линию задержки соединен с вторым входом третьего триггера, третий, выход счетчика строк через третий элемент И соединен с вторым входом четвертого триггера, выходы третьего и четвертого триггеров подключены к первому и второму входам сумматора, выход которого соединен с вторым входом управляемой линии задержки, отличающееся тем, что, с целью расширения области применения устройства , оно содержит пятый, шестой и седьмой триггеры, формирователи переднего и заднего фронтов информационного, сигнала , четвертый элемент И , третью и четвертую линии задержки , причем вход пятого триггера соединен с выходом формирующего усилителя , первый выход пятого триггера через формирователь заднего фронта подключен к первому элементу И к вторым входам второго и третьего элементов И, второй выход пятого триггера через последовательно соединенные формирователь переднего фронта, четвертый элемент И и третью линию задержки подключен к первым входам шестого и седьмого тирггеров, выходы которых сое динены с третьим и четвертым входами сумматора, второй вход четвертого элемента И подключен к первому выходу Счетчика строк, второй вход шестого триггера соединен с генератором строк, соединенным через четвертую линию задержки с вторым входом седьмого триггера .
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 231917, кл. А 01 В 69/04, 1968.
2.Авторское свидетельство СССР 648156, кл. А 01 В 69/04, 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического направления движения самоходных агрегатов | 1977 |
|
SU648156A1 |
| Фотооптический датчик системы автоматического вождения мобильного агрегата | 1986 |
|
SU1423012A1 |
| Устройство для отображения телетекста на экране телевизионного приемника | 1980 |
|
SU1181568A3 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| Способ отображения графической информации и устройство для его осуществления | 1984 |
|
SU1327154A1 |
| Устройство для автоматического вождения мобильного агрегата | 1985 |
|
SU1336965A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЦИФРОВОГО СИГНАЛА ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2287909C2 |
| Устройство для считывания и отображения графической информации | 1986 |
|
SU1506459A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТЕЛЕВИЗИОННОГО ИЗОБРАЖЕНИЯ С ИЗМЕНЕНИЕМ МАСШТАБА УПРАВЛЯЕМОГО ФРАГМЕНТА | 1993 |
|
RU2065206C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1995 |
|
RU2096801C1 |
t L
xV
f
/7
J
фуг. /
V
V
L 1 I k .
V
I/
и
a
-ЧВ
I.
fl k
